一种地板铺设机器人
1.本发明涉及地板铺设技术领域,尤其涉及一种地板铺设机器人。
背景技术:
2.近年来,随着我国经济的快速发展,人们生活水平的日益提高,对周围环境的要求,也有了更高的要求,在建筑物的装修过程中,为了整洁干净,一般都需要在地上铺设一层地板。
3.在地板的铺设中,所这件技术的发展,通过机器人自动铺设已慢慢取代人工铺设,通过机器人自动铺设地板,不但可以大大提升铺设效率,而且还节省了用人成本,地板的铺设质量也不会因为工人师傅的不同而出现质量差异,确保铺设质量。
4.但是,目前市场上,现有的地板铺设机器人,在铺设地板时,自动化程度较低,无法连续将多块地板按顺序进行铺设。
技术实现要素:
5.本发明的目的是为了解决现有技术中,自动化程度较低,无法连续将多块地板按顺序进行铺设等问题,而提出的一种地板铺设机器人。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种地板铺设机器人,包括底板,所述底板底部设有驱动轮,还包括:固定连接在底板上的连接板,所述连接板远离底板的一端转动连接有转动架,所述转动架上固定连接有第一电机,所述第一电机的输出端连接有单向螺纹杆;转动连接在底板上的转动杆,所述转动杆顶部固定连接有固定盘,所述单向螺纹杆远离第一电机的一端转动在固定盘上;所述转动架与固定盘之间连接有第一导向杆;螺纹连接在单向螺纹杆上的升降板,所述升降板底部设有吸盘,所述升降板滑动在第一导向杆上;固定连接在底板上的第三电机,所述第三电机的输出端固定连接有蜗杆,所述转动杆上固定连接有蜗轮,所述蜗杆与蜗轮啮合连接。
8.为了实现自动添加粘连剂,优选地,还包括:固定连接在底板上的储存箱和泵体,固定连接在底板底部的排料口;所述泵体的输入端与储存箱之间连通有第三管道,所述泵体的输出端与排料口之间连通有第二管道。
9.为了实现粘连效果,优选地,还包括:转动连接在底板底部的双向螺纹杆,所述双向螺纹杆上螺纹连接有移动块,所述排料口固定在移动块上;所述第三电机的输出端固定连接有第二转轴,所述蜗杆固定在第二转轴上,所述第二转轴与双向螺纹杆之间通过皮带相连接;固定连接在底板底部的第二导向杆,所述移动块滑动连接在第二导向杆上。
10.优选地,还包括:转动连接在底板上的第三转轴,所述第二转轴远离第三电机的一端通过棘轮组件与第三转轴相连接;所述皮带连接在第三转轴和双向螺纹杆之间。
11.为了提高铺设质量,优选地,所述升降板上设有震动器。
12.为了防止粘连剂凝固,优选地,还包括:固定连接在储存箱顶部的防护罩,所述防
护罩内固定连接有第二电机,所述第二电机的输出端固定连接有搅拌杆;所述搅拌杆位于储存箱内。
13.为了去除底板表面灰尘,优选地,还包括:固定连接在防护罩内的负压罩,所述负压罩内转动连接有第一转轴,所述第一转轴上固定连接有风扇;所述第一转轴延伸出负压罩的一端固定连接有第二齿轮,所述第二电机的输出端固定连接有第一齿轮,所述第一齿轮与第二齿轮啮合连接;所述防护罩侧壁设有透气网,所述负压罩底部设有进气口;所述连接板侧壁设有喷头,所述喷头与负压罩顶部之间连接有第一管道。
14.为了提高对第二电机的散热效率,优选地,所述透气网和进气口分别位于第二电机的两侧。
15.为了实现对底板进行限位,优选地,所述防护罩顶部固定连接有挡杆;所述喷头位于连接板和挡杆之间。
16.为了便于清洗储存箱,优选地,所述第二管道上连通有第四管道,所述第四管道上设有转动开关。
17.与现有技术相比,本发明提供了一种地板铺设机器人,具备以下有益效果:
18.1、该地板铺设机器人,在铺设的过程中,通过控制升降板的水平转动以及上下移动,然后与吸盘仙湖配合,完成铺设,然后通过驱动轮进行移动,随后在次通过升降板,自动对下一块地板本体进行铺设,进而实现连续将多块地板按顺序进行铺设的目的。
19.2、该地板铺设机器人,第三电机驱动升降板水平转动的同时,同步通过皮带驱动双向螺纹杆转动,进而带动排料口往复移动,实现每一个排料口排出的粘连剂是曲线的形状,不是一条直线,便于后期铺设地板本体时,粘连剂与地板本体粘连的更加牢固。
20.3、该地板铺设机器人,第二电机在带动搅拌杆转动的过程中,同步带动风扇转动,产生负压从喷头喷出,在升降板通过吸盘将地板本体运走的过程中,喷头吹出的气流会吹向此块地板本体,将其表面灰尘吹除,尤其是地板本体下表面的灰尘,保证铺设质量。
21.4、该地板铺设机器人,搅拌杆不但起到了防止粘连剂凝固的作用,在铺设完成后,需要清洗储存箱时,通过搅拌杆快速转动,实现对储存箱内壁进行清洗。
附图说明
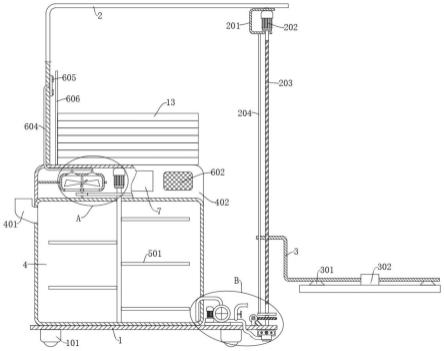
22.图1为本发明提出的一种地板铺设机器人的结构示意图;
23.图2为本发明提出的一种地板铺设机器人图1中a部分的放大图;
24.图3为本发明提出的一种地板铺设机器人图1中b部分的放大图;
25.图4为本发明提出的一种地板铺设机器人第三电机的结构示意图;
26.图5为本发明提出的一种地板铺设机器人移动块的结构示意图;
27.图6为本发明提出的一种地板铺设机器人转动架的结构示意图;
28.图7为本发明提出的一种地板铺设机器人升降板的结构示意图;
29.图8为本发明提出的一种地板铺设机器人喷头的结构示意图。
30.图中:1、底板;101、驱动轮;2、连接板;201、转动架;202、第一电机;203、单向螺纹杆;204、第一导向杆;205、固定盘;206、转动杆;3、升降板;301、吸盘;302、震动器;4、储存箱;401、加料口;402、防护罩;5、第二电机;501、搅拌杆;502、第一齿轮;503、第一转轴;504、第二齿轮;6、负压罩;601、风扇;602、透气网;603、进气口;604、第一管道;605、喷头;606、挡
杆;7、侧门;8、第三电机;801、第二转轴;802、蜗杆;803、蜗轮;9、第三转轴;901、棘轮组件;902、皮带;903、双向螺纹杆;904、第二导向杆;10、移动块;1001、排料口;1002、第二管道;11、泵体;1101、第三管道;12、第四管道;1201、转动开关;13、地板本体。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
32.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
33.实施例1:
34.参照图1-8,一种地板铺设机器人,包括底板1,底板1底部设有驱动轮101,驱动轮101用以驱动底板1乃至整个机器人移动,还包括:固定连接在底板1上的连接板2,连接板2远离底板1的一端转动连接有转动架201,转动架201上固定连接有第一电机202,第一电机202的输出端连接有单向螺纹杆203,单向螺纹杆203与转动架201围绕连接板2的转动中心共线。
35.转动连接在底板1上的转动杆206,转动杆206顶部固定连接有固定盘205,单向螺纹杆203远离第一电机202的一端转动在固定盘205上,单向螺纹杆203和固定盘205以及转动杆206轴心共线。
36.转动架201与固定盘205之间连接有第一导向杆204,第一导向杆204与转动架201和固定盘205之间,可以是固定连接也可以是转动连接。
37.螺纹连接在单向螺纹杆203上的升降板3,升降板3底部设有吸盘301,升降板3滑动在第一导向杆204上;固定连接在底板1上的第三电机8,第三电机8的输出端固定连接有蜗杆802,转动杆206上固定连接有蜗轮803,蜗杆802与蜗轮803啮合连接。
38.工作时,工人师傅将多块需要铺设的地板本体13放置在底板1上,且底板背面向下,就是需要铺设的一面向下,然后工人师傅在地上涂抹粘连剂,然后启动第一电机202,通过单向螺纹杆203将升降板3移动到顶部,然后启动第三电机8,通过蜗杆802与蜗轮803驱动转动杆206转动,进而通过固定盘205和第一导向杆204带动升降板3水平转动,此时,转动架201也会同步自转,当升降板3转动到地板本体13上方时,停止水平转动,然后在次通过第一电机202启动升降板3向下移动,吸盘301与地板本体13上表面接触,由于地板本体13上表面比较光滑,所以,通过吸盘301很容易吸附,然后升降板3向上移动一端距离后,第三电机8反转,将升降板3带动地板本体13反向水平转动到需要铺设的区域上方,然后在次驱动升降板3向下移动,使地板本体13与粘连剂接触,最后松开吸盘301,完成铺设。
39.铺设完成后,通过驱动轮101进行移动,然后重复上述过程,自动对下一块地板本体13进行铺设,进而实现连续将多块地板按顺序进行铺设的目的,自动化程度得到提升。
40.需要指明的是,地板本体13的材质不同,粘连剂也不相同,地板本体13如果是木头的,那么粘连剂则为地板胶;地板本体13如果是瓷砖,那么粘连剂则为水泥浆。
41.如图1、3、5,为了实现自动在地上涂抹粘连剂,代替工人手动涂抹,对整体的技术
方案,进行了优化。
42.还包括:固定连接在底板1上的储存箱4和泵体11,固定连接在底板1底部的排料口1001,排料口1001的个数为5-15个,且一字排开,储存箱4侧壁设有加料口401,泵体11的输入端与储存箱4之间连通有第三管道1101,泵体11的输出端与排料口1001之间连通有第二管道1002。
43.根据地板本体13的材质不同,将事先准备好的对应的粘连剂,加注在储存箱4内,然后在铺设过程中,在铺设前,启动泵体11,通过第三管道1101与第二管道1002将粘连剂输送到排料口1001内,然后排出,然后与驱动轮101相互配合,同步带动底板1向后移动,实现自动涂抹粘连剂,然后在通过升降板3,将地板本体13铺设在涂抹好的粘连剂上,然后在次启动泵体11和驱动轮101,一边移动一边涂抹粘连剂,进行下次铺设。
44.如图3、4、5,为了提高粘连剂涂抹质量,对整体的技术方案,进一步进行了优化。
45.还包括:转动连接在底板1底部的双向螺纹杆903,双向螺纹杆903上螺纹连接有移动块10,排料口1001固定在移动块10上,排料口1001固定连接在移动块10的底部。
46.第三电机8的输出端固定连接有第二转轴801,蜗杆802固定在第二转轴801上,第二转轴801与双向螺纹杆903之间通过皮带902相连接;固定连接在底板1底部的第二导向杆904,移动块10滑动连接在第二导向杆904上。
47.在驱动轮101驱动整个装置移动,通过泵体11进行涂抹粘连剂的同时,为了提升铺设效率,同步启动第三电机8,驱动升降板水平转动,此时,第三电机8同步通过皮带902驱动双向螺纹杆903转动,进而带动移动块10往复移动,进而带动排料口1001往复移动,实现每一个排料口1001排出的粘连剂是曲线的形状,不是一条直线,便于后期铺设地板本体13时,粘连剂与地板本体13粘连的更加牢固,不会出现空包现象。
48.第二管道1002为可活动的软管。
49.如图4,还包括:转动连接在底板1上的第三转轴9,第二转轴801远离第三电机8的一端通过棘轮组件901与第三转轴9相连接;皮带902连接在第三转轴9和双向螺纹杆903之间。
50.由于第三电机8需要正反转,通过棘轮组件901,实现第三转轴9只会向一个方向转动,也就是说,第三电机8正反转驱动升降板3水平往复转动时,第三电机8只会通过棘轮组件901驱动第三转轴9一半的时间转动,另一半时间,棘轮组件901自动打滑,进而保证双向螺纹杆903只会向同一个方向转动,保证移动块10移动的平稳性,避免出现排料口1001排出的粘连剂时,粘连剂曲线是平滑的曲线,不会出现拐点,进而保证粘连剂涂抹均匀。
51.棘轮组件901具有单向传递的特性,具体可以参照申请号:cn202111353579.6,专利标题:一种水泥基材料表面检测装置及其检测方法,所公开的棘轮组件,第三转轴9与外轴固定连接,第二转轴801与内轴固定连接。
52.实施例2:
53.参照图1-8,与实施例1基本相同,在实施例1的基础上,对整体技术方案,进一步进行了有优化。
54.如图1、7,升降板3上设有震动器302。
55.当吸盘301吸附地板本体13时,震动器302与地板本体13上表面接触,在铺设时,当地板本体13与粘连剂接触时,启动震动器302,是地板本体13发生轻微震动,同时通过升降
板3对地板本体13施加一定的压力,可将粘连剂更好的向四周扩散,铺满地板本体13整个底部,提高地板本体13铺设的牢固性。
56.如图1和2,还包括:固定连接在储存箱4顶部的防护罩402,防护罩402内固定连接有第二电机5,第二电机5的输出端固定连接有搅拌杆501;搅拌杆501位于储存箱4内。
57.防护罩402侧壁设有侧门7。
58.在铺设过程中,驱动第二电机5,驱动搅拌杆501转动,搅动储存箱4内的粘连剂,防止凝固结块,保证铺设质量。
59.如图1和8,连接板2也可固定在防护罩402顶部。
60.如图1、2、8,为了保证铺设质量,对整体的技术方案,进一步进行了优化。
61.还包括:固定连接在防护罩402内的负压罩6,负压罩6内转动连接有第一转轴503,第一转轴503上固定连接有风扇601,风扇601位于负压罩6内。
62.第一转轴503延伸出负压罩6的一端固定连接有第二齿轮504,第二电机5的输出端固定连接有第一齿轮502,第一齿轮502与第二齿轮504啮合连接;防护罩402侧壁设有透气网602,负压罩6底部设有进气口603;连接板2侧壁设有喷头605,喷头605与负压罩6顶部之间连接有第一管道604,喷头605个数为10-30个。
63.如图1,将地板本体13放置在防护罩402顶部。
64.第二电机5在带动搅拌杆501转动的过程中,同步通过第一齿轮502和第二齿轮504转动,然后带动风扇601转动,产生负压,气体通过透气网602进入防护罩402内,然后通过进气口603进入负压罩6内,最后通过第一管道604从喷头605喷出,同时,升降板3通过吸盘301吸附防护罩402顶部的地板本体13时,在将地板本体13运走的过程中,会途经喷头605的前方,喷头605吹出的气流会吹向此块地板本体13,将其表面灰尘吹除,尤其是地板本体13下表面的灰尘,保证铺设质量。
65.第二齿轮504的齿数,小于第一齿轮502的齿数,起到提高第一转轴503转速的目的。
66.如图1,透气网602和进气口603分别位于第二电机5的两侧。
67.气体在通过透气网602进入防护罩402内时,会首先经过第二电机5,然后才会通过进气口603进入防护罩402内,通过气流,可快速将第二电机5所散发的热量带走,提高第二电机5寿命,因为第二电机5在工作时,需要驱动搅拌杆501搅拌粘连剂,需要的功率以及扭矩比较大,所以,发热量比较大,需要散热。
68.如图1和7,防护罩402顶部固定连接有挡杆606;喷头605位于连接板2和挡杆606之间,挡杆606的个数为2-6根。
69.通过挡杆606的限位,当地板本体13放置在防护罩402顶部的时候,可有效防止误伤到喷头605,同时,地板本体13全部与挡杆606相贴,也起到了定位的作用。
70.如图3,第二管道1002上连通有第四管道12,第四管道12上设有转动开关1201,在铺设过程中,通过转动开关1201使第四管道12处于常闭的状态。
71.在铺设完成后,需要清洗储存箱4时,通过加料口401向储存箱4内加注清水,然后启动第二电机5,带动搅拌杆501快速转动,对储存箱4内壁进行清洗,然后通过转动开关1201,使第四管道12导通,在次启动泵体11,将储存箱4内的水抽出,加大马力,此时,一部分水会通过第四管道12直接排出,另一部分会进入第二管道1002内,然后从排料口1001排出,
对第二管道1002和排料口1001进行清洗。
72.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1