自主地板清洁系统的制作方法
自主地板清洁系统
[0001]
本申请是申请日为2018年06月04日、中国申请号为201810563789.x、发明名称为“自主地板清洁系统”的发明专利申请的分案申请,其全部内容结合于此作为参考。
[0002]
相关申请的引证
[0003]
本申请要求于2017年6月5日提交的美国临时专利申请no.62/515,300的权益,该文献全文以引证方式并入本文。
技术领域
[0004]
本发明涉及一种自主地板清洁系统。
背景技术:
[0005]
自主或机器人地板清洁器可在没有用户或操作者的帮助的情况下移动以清洁地板表面。例如,地板清洁器可被配置成将污物(包括灰尘、毛发和其它碎屑)扫入地板清洁器上携带的收集箱中,以及/或者使用收集污物的布清扫污物。地板清洁器可在清洁地板表面时围绕表面随机移动,或者使用映射/导航系统进行围绕表面的引导的导航。一些地板清洁器进一步被配置成施加和吸取液体以深度清洁地毯、毛毯和其它地板表面。
技术实现要素:
[0006]
本公开的一个方面涉及一种自主地板清洁系统,包括干式真空吸尘机器人,用于产生工作气流以从待清洁表面去除污物并且将污物储存在收集空间中,干式真空吸尘机器人还包括驱动系统,用于使干式真空吸尘机器人自主地移动到待清洁表面上;污渍感测系统,用于检测污渍;以及信标部署系统,用于在污渍的位置处选择性地部署信标;深度清洁机器人,用于储存清洁流体并且将清洁流体递送到待清洁表面,以及用于从待清洁表面去除清洁流体和碎屑,并且储存回收的清洁流体和碎屑,深度清洁机器人还包括控制器,用于控制深度清洁机器人的操作;以及驱动系统,基于来自控制器的输入而使深度清洁机器人自主地移动到待清洁表面上方;并且其中,干式真空吸尘机器人被配置成经由污渍感测系统检测污渍并且将信标部署在检测到的污渍的位置处,并且信标可操作地耦合到控制器,使得信标将深度清洁机器人引导到该位置。
[0007]
本公开的另一个方面涉及一种自主地板清洁系统,包括干式真空吸尘机器人,用于产生工作气流以从待清洁表面去除污物并且将污物储存在干式真空吸尘机器人上的收集空间中,并且具有用于将干式真空吸尘机器人自主地移动到待清洁表面上的驱动系统,以及深度清洁机器人,用于存储清洁流体并且将清洁流体递送到待清洁表面,以及用于从待清洁表面去除清洁流体和碎屑,并且储存回收的清洁流体和碎屑,并且具有用于使深度清洁机器人自主地移动到待清洁表面上的驱动系统,并且其中,干式真空吸尘机器人或深度清洁机器人中的至少一个被配置成用于沿着第一路径行进,并且其中,至少一个干式真空吸尘机器人或深度清洁机器人包括用于在沿着第一路径行进时检测污渍的污渍感测系统,以及被配置成用于沿着与第一路径不同的路径引导干式真空吸尘机器人或深度清洁机
器人中的另一个移动到污渍。
附图说明
[0008]
在附图中:
[0009]
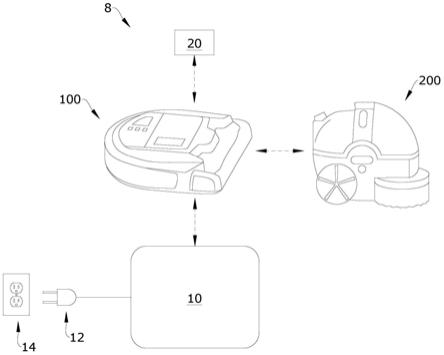
图1是根据本文所述的各个方面的自主地板清洁系统的示意图;
[0010]
图2是根据本文所述的各个方面的图1的系统的自主真空吸尘器的示意图。
[0011]
图3是根据本文所述的各个方面的图1的系统的自主真空吸尘器的示意图。
[0012]
图4是根据本文所述的各个方面的图1的系统的自主深度清洁器的示意图。
[0013]
图5是根据本文所述的各个方面的图1的系统的自主深度清洁器的示意图。
[0014]
图6是根据本文所述的各个方面的操作的方法的透视图。
[0015]
图7是根据本文所述的各个方面的操作的方法的透视图。
[0016]
图8是根据本文所述的各个方面的操作的方法的透视图。
[0017]
图9是根据本文所述的各个方面的操作的方法的透视图。
[0018]
图10是根据本文所述的各个方面的操作的方法的透视图。
[0019]
图11a是用于干式真空吸尘机器人的信标(beacon)部署系统的示意图,其中信标处于保持位置。
[0020]
图11b是用于干式真空吸尘机器人的图11a的信标部署系统的示意图,其中信标处于释放位置。
[0021]
图12是根据本文所述的各个方面的用于干式真空吸尘机器人的信标部署系统的示意性顶视图。
[0022]
图13是根据本文所述的各个方面的用于干式真空吸尘机器人的信标部署系统的示意图。
[0023]
图14是根据本文所述的各个方面的自主地板清洁系统的示意图。
[0024]
图15是根据本文所述的各个方面的自主地板清洁系统的示意图。
[0025]
图16是描绘根据本文所述的各个方面的使用地板清洁系统的操作的方法的流程图。
具体实施方式
[0026]
本公开的各个方面总体上涉及一种地板清洁系统,该地板清洁系统包括多个无人看管的自主地板清洁器或机器人清洁器,以便自主地清洁地板表面(包括诸如地毯和毛毯的软质表面以及诸如硬木、瓷砖和油毡的硬表面)。机器人被配置成共享映射、导航和/或污渍感测系统。第一机器人携带映射、导航和/或污渍感测系统,并且第二机器人从第一机器人的映射、导航和/或污渍感测系统接收信息。
[0027]
一个机器人可以是干式真空吸尘机器人,该干式真空吸尘机器人包括真空收集系统,该真空收集系统用于产生工作气流以从待清洁表面去除污物并且将污物储存在安装在可自主移动的单元中或携带在可自主移动的单元上的真空吸尘器上的收集空间中。另一个机器人可以是包括流体供应系统和流体回收系统的湿式或深度清洁机器人,该流体供应系统用于储存清洁流体并且将清洁流体递送到待清洁表面,该流体回收系统用于从待清洁表面去除清洁流体和碎屑,并且储存安装在可自主移动的单元中或携带在可自主移动的单元
上的回收的清洁流体和碎屑。
[0028]
图1是根据本文所述的各方面的自主地板清洁系统8的示意图。系统8是包括至少一个干式真空吸尘机器人100和至少一个深度清洁机器人200的多机器人系统8。不是重复昂贵的映射和导航部件,机器人100、200被配置成共享这些特定的高成本资源。系统8使用主要/次要协议,其中一个机器人(主要的)控制另一个机器人(辅助的)。主要机器人包括完整的映射、导航和污渍感测技术和硬件。然而,辅助机器人可以是没有这些特征部的较不智能的机器人,而是被配置成利用主要机器人的映射、导航和污渍感测。这提供了具有更大范围清洁能力的自主地板清洁系统8,同时避免了某些部件的重复,因此与两个全特征机器人相比提供了更低成本的解决方案。
[0029]
在一个示例中,干式真空吸尘机器人100是主要的,并且深度清洁机器人200是辅助的。该配置提供了多功能清洁能力,但是降低了深度清洁机器人200的总体成本和复杂性。深度清洁机器人200与干式真空吸尘机器人100配合工作,以使用干式真空吸尘机器人100的智能(包括其映射、导航和污渍感测系统)。在一个示例中,可使用干式真空吸尘机器人100的智能来定位和识别斑点和污渍,并且可指示更简单的专业的深度清洁机器人200来清洁这些斑点和污渍。
[0030]
系统8的机器人100、200可共享公共对接站10以用于对机器人100、200充电或以其它方式维修机器人100、200。在一个示例中,对接站10可连接到家用电源(诸如a/c电源插座14),并且可包括用于将ac电压转换成dc电压的转换器12,以对每个机器人100、200上的电源进行再充电。对接站10还可包括用于监视机器人状态,实现自动对接功能,与每个机器人100、200通信的各种传感器和发射器(未示出)以及用于网络和/或蓝牙连接的特征部。
[0031]
人造屏障系统20也可与系统8一起提供,用于将机器人100、200容纳在用户确定的边界内。干式真空吸尘机器人100可被配置成与人造屏障系统20直接地相互作用,而深度清洁机器人200可被配置成仅通过干式真空吸尘机器人100与人造屏障系统20间接地相互作用。
[0032]
图2是用于自主式地板清洁系统8的自主式真空吸尘器或干式真空吸尘机器人100的一个实施例的示意图。干式真空吸尘机器人100将真空吸尘器的各种功能系统的部件安装在可自主移动的单元或外壳112中,包括真空收集系统的部件以产生用于从待清洁表面去除污物(包括灰尘、毛发和其它碎屑)的工作气流,并且将污物储存在真空吸尘器上的收集空间中;驱动系统,用于自主地将真空吸尘器移动到待清洁表面上方;以及导航/映射系统,用于引导干式真空吸尘器机器人100移动到待清洁表面上方,产生并储存待清洁表面的地图,以及记录状态或其它环境变量信息。自主式或机器人式真空吸尘器可具有与2018年3月22日公开并且以引用方式并入本文的美国专利申请公开号no.2018/0078106中所述的自主式或机器人式真空吸尘器相似的特性。
[0033]
控制器128与干式真空吸尘机器人100的各种功能系统可操作地耦合以控制其操作。控制器128可以是包含至少一个中央处理单元(cpu)的微控制器单元(mcu)。
[0034]
真空收集系统可包括:穿过具有空气入口和空气出口的单元的工作空气路径;定位成面对待清洁表面并限定空气入口的吸嘴114;用于产生工作气流的与吸嘴114流体连通的抽吸源116;以及用于收集来自工作气流的污物以便稍后处理的收集器或污物箱118。吸嘴114可限定工作空气路径的空气入口。抽吸源116可以是流体地在空气出口的上游的由单
元112承载的真空马达,并且可限定工作空气路径的一部分。污物箱118还可限定工作空气路径的一部分,并且包括与空气入口流体连通的污物箱入口。分离器120可形成在污物箱118的一部分中,用于从工作气流中分离流体和夹带的污物。分离器的一些非限制性示例包括一个或多个旋风分离器、过滤网、泡沫过滤器、hepa过滤器、过滤袋或其组合。任选地,还可提供马达前过滤器117和/或马达后过滤器119(图3)。
[0035]
另外,干式真空吸尘机器人100可包括信标保持器101,信标保持器可被配置成检索信标或将信标固定到干式真空吸尘机器人100。信标保持器101可选择性地在期望的目标位置处释放信标。
[0036]
转到图3,可提供至少一个搅动器或刷子140用于搅动待清洁表面。刷子140可以是刷辊,该刷辊被安装成相对于单元在其上移动的表面围绕大致水平的轴线旋转。包括单独的专用电刷马达142的驱动组件可设置在单元112内以驱动刷140。另选地,刷子140可由真空马达116驱动。搅动器的其它实施例也是可能的,包括一个或多个静止或不动的刷子,或者围绕大致垂直的轴线旋转的一个或多个刷子。
[0037]
驱动系统可包括用于驱动单元112跨过待清洁表面的驱动轮130。驱动轮130可通过共用驱动马达或通过变速器(未示出)与驱动轮130耦合的单独驱动马达131来操作,该变速器可包括齿轮系组件或另一个合适的变速器。驱动系统可接收来自控制器128的输入,用于基于来自导航/映射系统的输入驱动单元112跨过地板。可在向前方向或向后方向上驱动驱动轮130,以便向前或向后移动单元112。此外,驱动轮130可同时或单独地操作,以便使单元112在期望的方向上转动。
[0038]
控制器128可接收来自导航/映射系统的输入,用于引导驱动系统将干式真空吸尘机器人100移动到待清洁表面上。导航/映射系统可包括存储器168,存储器168存储用于导航的地图和来自各传感器132(图2)的输入,其用于引导干式真空吸尘机器人100的移动。例如,轮编码器172可放置在轮马达131的驱动轴上,并且被配置成测量行进的距离。该测量结果可作为输入提供给控制器128。
[0039]
马达驱动器144、146、148可被设置用于分别控制真空马达116、电刷马达142和轮马达131,并且用作控制器128与马达116、142和131之间的接口。马达驱动器144、146、148可以是集成电路芯片(ic)。对于轮马达131,一个马达驱动器148可同时或单独地控制马达131。
[0040]
用于真空马达116、电刷马达142和轮马达131的马达驱动器144、146、148可电耦合到可包括可再充电电池或电池组152的电池管理系统150。在一个示例中,电池组152可包括锂离子电池。电池组152的充电触点可设置在单元112的外部上。用于接收用于充电的单元112的对接站10可设置有对应的充电触点。在一个示例中,设置在干式真空吸尘机器人100上的充电触点可以是电连接器,诸如dc插孔154。
[0041]
控制器128进一步与用户界面(ui)124可操作地耦合以接收来自用户的输入。用户界面124可用于选择干式真空吸尘机器人100的操作周期或以其它方式控制干式真空吸尘机器人100的操作。用户界面124可具有用于向用户提供视觉通知的显示器(诸如led显示器156)、标记的指示灯或照明图标。视觉通知的示例可包括操作状态和诊断信息的指示,诸如电池152和/或过滤器寿命状态、wifi或蓝牙连接状态以及各种错误和故障代码。显示驱动器158可被设置用于控制显示器156,并且充当控制器128和显示器156之间的接口。显示驱
动器158可以是集成电路芯片(ic)。
[0042]
用户界面124可进一步具有一个或多个开关126、127,所述开关由用户致动以向控制器128提供输入以控制干式真空吸尘机器人100的各种部件的操作。例如,开关126、127中的一个可以是抽吸功率开关,该抽吸功率开关可被用户选择性地关闭以启用真空马达116。例如,开关126、127中中的另一个可与可配置显示器耦合以选择操作模式、设置功率水平或运行时间、输入清洁时间表、配置通知或输入密码。开关驱动器125可被设置用于控制开关126、127,并且充当控制器128和开关126、127之间的接口。
[0043]
干式真空吸尘机器人100可进一步设置有用于向用户提供可听通知的扬声器160。可听通知的示例包括公告,诸如嘟嘟声、音调或预先录制的语音。扬声器驱动器162可被设置用于控制扬声器160,并且充当控制器128和扬声器160之间的接口。扬声器驱动器162可以是集成电路芯片(ic)。
[0044]
控制器128还可与用于接收关于环境的输入的各种传感器132、134(图2)可操作地耦合,并且可使用传感器输入来控制干式真空吸尘机器人100的操作。如前所述,传感器输入可进一步存储在存储器168中并且/或者用于开发用于导航的地图。虽然图3中示出了一些示例性传感器,但是应该理解的是,并非可设置所示出的所有传感器,可设置未示出的附加的传感器,并且可以任何组合设置传感器。
[0045]
干式真空吸尘机器人100可包括具有一个或多个传感器的位置控制或定位系统,用于确定机器人相对于物体的位置及其在环境中的位置。定位系统可利用还包括成像器164和图像处理器166的视觉测距法,成像器164和图像处理器166用于捕获环境的连续图像并且比较图像上的空间物体或转变点的位置,以确定干式真空吸尘机器人100在环境中的相对位置。定位系统还可包括用于距离和位置感测的一个或多个红外(ir)障碍物传感器170。障碍物传感器170可安装到自主单元112的外壳,诸如在单元112的前面,以确定到干式真空吸尘机器人100前方的障碍物的距离。当检测到物体时,来自障碍物传感器170的输入可用于减慢和/或调整单元112的路线。附加的传感器可结合到位置控制和定位系统中,诸如照相机、轮编码器172、激光测距仪或基于rf的飞行时间传感器中的至少一个或其组合,用于确定单元的位置和地点。
[0046]
还可设置碰撞传感器174以确定对单元112的前方或侧面撞击。碰撞传感器174可与单元112的外壳上的缓冲器集成。来自碰撞传感器174的输出信号向控制器128提供输入以选择障碍物避免算法。
[0047]
除了障碍物传感器170和碰撞传感器174之外,定位系统还可包括附加的传感器(包括侧壁传感器176、一个或多个悬崖传感器180和/或加速度计178)。侧壁或壁跟随传感器176可位于单元112的侧面附近,并且可包括侧向光学位置传感器,该侧向光学位置传感器提供距离反馈并且控制单元112,使得单元112可跟随在墙附近而不接触壁。悬崖传感器180可以是面向底部的光学位置传感器,其提供距离反馈并且控制单元112,使得单元112可避免诸如楼梯井或壁架的过多下降。除了光学传感器之外,壁跟随传感器176和悬崖传感器180可以是机械或超声波传感器。
[0048]
加速度计178可以是位于控制器128上的集成惯性传感器,并且可以是感测线性、旋转和磁场加速度的九轴陀螺仪或加速度计。加速度计178可使用加速度输入数据来计算速度和姿势的变化并将其传送到控制器128,用于在待清洁表面周围导航干式真空吸尘机
器人100。
[0049]
干式真空吸尘机器人100还可包括一个或多个提升传感器182,该传感器检测何时将单元112抬离待清洁表面,诸如当用户拿起干式真空吸尘机器人100时。该信息作为输入提供给控制器128,控制器128将停止真空马达116、电刷马达142和/或轮马达131的操作。提升传感器182还可检测单元112何时与待清洁表面接触,诸如当用户将干式真空吸尘机器人100放回地面上时;在此类输入时,控制器128可恢复真空马达116、电刷马达142和/或轮马达131的操作。
[0050]
干式真空吸尘机器人100还可包括用于检测污物箱118和/或过滤器的存在的一个或多个传感器184。例如,可提供用于检测污物箱118和/或过滤器的重量的一个或多个压力传感器。该信息作为输入提供给控制器128,这可防止干式真空吸尘机器人100的操作,直到正确安装污物箱118和/或过滤器。控制器128还可指示显示器156或扬声器160向用户提供污物箱118和/或过滤器缺失的通知。
[0051]
干式真空吸尘机器人100还可包括用于检测待清洁表面的状况(可包括检测污渍)的一个或多个传感器。例如,干式真空吸尘机器人可设置有红外污物传感器185、污物传感器186、气味传感器187和/或湿式垃圾传感器188。在一个示例中,红外(ir)污物传感器185可包括定位在工作空气路径中的ir发射器和ir接收器,用于基于接收器接收到的ir信号的强度的变化来监测工作气流中夹带的污物的相对量。在另一个示例中,污渍传感器186可包括被配置成监视区域上的表面的颜色变化的一个或多个色谱图像传感器。任选地,污渍传感器186可包括光敏污渍传感系统,该系统包括用于发射可见光和不可见紫外电磁光谱内的波长范围的照明元件,用于照亮人眼可见和不可见的污渍。光敏污渍感测系统还可包括用于测量反射率值并将该数据发送到处理器的光读取器,这可触发一个或多个预定义的响应。在huffman的美国专利no.8,719,998中更全面地公开了一种代表性的光敏污渍传感器系统,该专利全文以引用的方式包括在本文。
[0052]
在又一个示例中,气味传感器187可包括气体传感器,并且感测方法可基于空气传播的气味颗粒与传感器187之间的电化学反应。电化学反应可导致传感器187内的电变化,其可包括不同的材料,诸如金属氧化物半导体、聚合物、碳纳米管或吸湿材料。在一个示例中,气体传感器187可被配置成检测氨、硫化氢和硫醇(甲硫醇)。在又一个示例中,湿式垃圾传感器188可以是湿度传感器,诸如电容式相对湿度传感器或电阻式湿度传感器。
[0053]
地板状况传感器向控制器128提供输入,控制器128可诸如通过选择或修改清洁循环基于待清洁表面的状况来指示干式真空吸尘机器人100的操作。此外,干式真空吸尘机器人100可标记检测到的污渍的位置,并且映射/导航系统可将污渍的位置存储在存储器168中。例如,包括污渍相对于诸如对接站10或人造屏障20的参考点的位置的污渍路径点可被存储在存储器168中。
[0054]
例如,干式真空吸尘机器人100还可包括与控制器128可操作地耦合并且被配置成通过全局、本地和/或个人区域网络与其它设备进行通信的一个或多个无线电设备190。在一个示例中,干式真空吸尘机器人100可通过无线无线电设备190与深度清洁机器人200共享数据,诸如房间地图或污渍路径点。例如,无线无线电设备190可连接到云服务器,并且云服务器可联系深度清洁机器人200并且经由全球wifi网络传送房间地图或污渍路径点数据。另选地,无线电设备190可通过诸如蓝牙、低能量连接的无线个人区域网络将干式真空
吸尘机器人100连接到深度清洁机器人200。
[0055]
干式真空吸尘机器人100还可包括一个或多个ir收发器192,用于与诸如深度清洁机器人200、对接站10和/或人造屏障系统20(下面描述的)的外围设备进行通信。干式真空吸尘机器人100上的一个或多个ir收发器192和相关联的外围设备上的对应收发器可设置在基于频率的通信协议上,使得每对相关联的ir收发器192可被配置成传送可包括具有预定义响应的各种不同指令的不同的代码集。
[0056]
例如,干式真空吸尘机器人100可在机器人归航过程期间经由ir收发器192与对接站进行通信。干式真空吸尘机器人100可通过打开其ir收发器192并且搜索由对接站10上的收发器发射的可用于将干式真空吸尘机器人100引导到对接站10的对应的ir信号来启动归航过程,诸如通过发射信号以指示干式真空吸尘机器人100向左、向右或朝向对接站直线操纵。
[0057]
在另一个示例中,干式真空吸尘机器人100可经由对应的ir收发器192、292与深度清洁机器人200进行通信(图5)。在这种情况下,干式真空吸尘机器人100可向深度清洁机器人200发射编码信号,以指示深度清洁机器人200跟随干式真空吸尘机器人100到污渍。然后,干式真空吸尘机器人100可选择性地发射用于将深度清洁机器人200引导到污渍的信号,诸如用于指示深度清洁机器人200向左、向右或朝向污渍直线操纵。
[0058]
人造屏障系统20可包括人造屏障发生器50,人造屏障发生器50包括外壳,其具有用于接收来自干式真空吸尘机器人100的声波信号的至少一个声波接收器52和用于在预定时间段内朝向预定方向发射编码的ir光束的至少一个ir发射器54。人造屏障发生器50可由可再充电或不可再充电电池供电。在一个实施例中,声波接收器52可包括被配置成感测预定阈值声级的麦克风,该预定阈值声级与干式真空吸尘机器人100在其距人造屏障发生器50预定距离内时发出的声级相对应。任选地,人造屏障发生器50还可包括在外壳的基部附近的多个ir发射器54,其被配置成围绕人造屏障发生器50外壳的基部发射多个短场ir光束。人造屏障发生器50可被配置成在预定时间段内选择性地发射一个或多个ir光束,但是仅在麦克风感测到指示干式真空吸尘机器人100在附近的阈值声级之后。因此,只有当干式真空吸尘机器人100位于人造屏障发生器50附近时,人造屏障发生器50才能够通过发射ir光束来节省功率。
[0059]
干式真空吸尘机器人100可具有围绕单元112的周边的多个ir收发器192,以感测从人造屏障发生器50发射的ir信号,并且向控制器128输出对应的信号,控制器128可调整驱动轮控制参数以调整干式真空吸尘机器人100的位置,从而避免由人造屏障20编码的ir光束和短场ir光束建立的边界。这防止干式真空吸尘机器人100穿过人造屏障20边界和/或与人造屏障发生器50外壳碰撞。
[0060]
在操作中,从干式真空吸尘机器人100发出的大于预定阈值声级的声音可由麦克风感测并且触发人造屏障发生器50在预定的时间段内发射如前所述的一个或多个编码的ir光束。干式真空吸尘机器人100上的ir收发器192感测ir光束并且将信号输出到控制器128,然后控制器128操纵驱动系统来调整干式真空吸尘机器人100的位置,从而避免由人造屏障系统20建立的边界,同时继续在待清洁表面上执行清洁操作。
[0061]
图4是图1的系统8的自主深度清洁器或深度清洁机器人200的示意图。深度清洁机器人200将深度清洁器的各种功能系统的部件安装在可自主移动单元或外壳212中,该部件
包括:用于储存清洁流体并且将清洁流体递送到待清洁表面的流体供应系统的部件;用于从待清洁表面去除清洁流体和碎屑并且储存回收的清洁流体和碎屑的回收系统;以及用于将深度清洁机器人200自主地移动到待清洁表面上的驱动系统。可移动单元212可包括主外壳,该主外壳适于选择性地安装系统的部件以形成一体的可移动设备212。自主深度清洁器或深度清洁机器人可具有与2008年1月22日公布并且以引用方式并入本文的美国专利no.7,320,149中描述的自主深度清洁器或深度清洁机器人相似的特性。
[0062]
控制器228与深度清洁机器人200的各种功能系统可操作地耦合以控制其操作。控制器228可以是包含至少一个中央处理单元(cpu)的微控制器单元(mcu)。
[0063]
深度清洁机器人200可包括用于读取和解释来自rfid标签的信号的rfid读取器213。rfid读取器可安装到深度清洁机器人200的外壳212并且可包括一个或多个扫描天线和收发器,该收发器具有解码器以解释存储在rfid标签上的数据。扫描天线被配置成发射与rfid标签通信的信号(诸如无线电波),并且可任选地提供电磁能量以给rfid标签供电。
[0064]
流体输送系统可包括用于储存清洁流体供应的供应箱206和用于将清洁流体沉积到表面上的与供应箱206流体连通的流体分配器。清洁流体可以是液体,诸如水或专门配制用于地毯或硬表面清洁的清洁液。转到图5,流体分配器可以是设置在单元212的外壳上的一个或多个喷嘴207。另选地,流体分配器可以是具有多个出口的歧管。泵马达205设置在供应箱206和分配器207之间的流体路径中,以控制流体到分配器207的流动。如本领域中通常已知的,任选的部件的各种组合可结合到流体输送系统中,诸如用于在其施加到表面之前加热清洁流体的加热器或一个或多个流体控制和/或混合阀。
[0065]
可设置至少一个搅动器或刷子240用于搅动流体已经分配在其上的待清洁表面。刷子240可以是刷辊,该刷辊被安装成相对于单元212在其上移动的表面围绕大致水平的轴线旋转。包括单独的专用电刷马达242的驱动组件可设置在单元212内以驱动刷240。另选地,刷子240可由真空马达驱动。搅动器的其它实施例也是可能的,包括一个或多个静止或不动的刷子,或者围绕大致垂直的轴线旋转的一个或多个刷子。
[0066]
流体回收系统可包括:穿过具有空气入口和空气出口的单元的抽取路径;定位成面对待清洁表面并且限定空气入口的抽取或吸嘴214;用于接收从表面去除的污物和液体用于稍后处理的回收箱208;以及用于产生通过抽取路径的工作气流的与吸嘴214和回收箱208流体连通的抽吸源216。抽吸源216可以是在空气出口的流体上游由单元212承载的真空马达,并且可限定抽取路径的一部分。回收箱208也可限定出抽取路径的一部分,并且可包括用于从工作气流中分离液体的空气/液体分离器。任选地,也可设置马达前过滤器和/或马达后过滤器(未示出)。
[0067]
虽然未示出,但是刮板可设置在邻近吸嘴214的单元的外壳上,并且被配置成在单元212移动越过待清洁表面时接触表面。刮板可从待清洁表面擦拭残余液体,使得其可通过吸嘴214被吸入流体回收路径中,由此在待清洁表面上留下潮湿且无条纹的饰面。
[0068]
驱动系统可包括用于驱动单元212跨过待清洁表面的驱动轮230。驱动轮230可通过共用驱动马达或通过变速器(未示出)与驱动轮230耦合的单独驱动马达231来操作,该变速器可包括齿轮系组件或另一个合适的变速器。如下面进一步详细描述的,驱动系统可接收来自控制器228的输入,用于基于来自干式真空吸尘机器人100的输入驱动单元212跨过地板。可在向前方向或向后方向上驱动驱动轮230,以便向前或向后移动单元212。此外,驱
动轮230可同时或单独地操作,以便使单元212在期望的方向上转动。
[0069]
控制器228可接收来自干式真空吸尘机器人100的导航/映射系统和/或污渍感测系统的输入,用于引导驱动系统将深度清洁机器人200移动到待清洁表面上方。深度清洁机器人200可包括存储来自干式真空吸尘机器人100的输入的存储器268和深度清洁机器人200上的用于引导深度清洁机器人200的移动的各种传感器。例如,轮编码器272可放置在轮马达231的驱动轴上,并且被配置成测量行进的距离。该测量结果可作为输入提供给控制器228。
[0070]
马达驱动器203、246、244、248可被设置用于控制泵马达205、电刷马达242、真空马达216和轮马达231,并且充当控制器和马达之间的接口。马达驱动器可以是集成电路芯片(ic)。对于轮马达231,一个马达驱动器可同时控制马达。
[0071]
用于泵马达205、电刷马达242、真空马达216和轮马达231的马达驱动器203、246、244、248可分别电耦合到可包括可再充电电池或电池组252的电池管理系统250。在一个示例中,电池组252可包括锂离子电池。电池组252的充电触点可设置在单元212的外部上。用于接收用于充电的单元212的对接站10可设置有对应的充电触点。在一个示例中,深度清洁机器人200的电池组252可以是可移除的并且可与干式真空吸尘机器人100的电池组152交换。在另一个示例中,可在深度清洁机器人200上以诸如dc插孔254的电连接器的形式提供替代的或补充的充电触点,用于在深度清洁机器人200脱开时对电池组252进行再充电。
[0072]
控制器228进一步与用户界面224(ui)可操作地耦合以接收来自用户的输入。用户界面224可用于选择深度清洁机器人200的操作周期或以其它方式控制深度清洁机器人200的操作。用户界面224可具有用于向用户提供视觉通知的显示器256(诸如led显示器)、标记的指示灯或照明图标。视觉通知的示例包括操作状态和诸如电池252和/或过滤器寿命状态、流体供应状态、回收箱液位、wifi或蓝牙连接状态以及各种附加错误和故障代码的诊断信息的指示。显示驱动器258可被设置用于控制显示器256,并且充当控制器228和显示器256之间的接口。显示驱动器258可以是集成电路芯片(ic)。
[0073]
用户界面224可进一步具有一个或多个开关226,所述开关由用户致动以向控制器228提供输入以控制深度清洁机器人200的各种部件的操作。例如,开关226中的一个可被配置成使深度清洁机器人200返回到对接站10,调整流量或抽吸水平,或暂停操作。开关驱动器225可被设置用于控制开关226,并且充当控制器228和开关226之间的接口。
[0074]
深度清洁机器人200可使用干式真空吸尘机器人的扬声器160(图3)以向用户提供可听通知。可听通知的示例包括公告,诸如嘟嘟声、音调或预先录制的语音。深度清洁机器人200也可能设置有其自己的扬声器。另选地,深度清洁机器人200和干式真空吸尘机器人100可无线连接到智能扬声器设备,该智能扬声器设备包括使机器人100、200能够一起通信以及将可听通知传送给用户的技能。
[0075]
控制器228还可与用于接收关于环境的输入的各种传感器可操作地耦合,并且可使用传感器输入来控制深度清洁机器人200的操作。传感器输入可进一步存储在存储器268中并且/或者传输到干式真空吸尘机器人100。虽然图5中示出了一些示例性传感器,但是应该理解的是,并非可设置所示出的所有传感器,可设置未示出的附加的传感器,并且可以任何组合设置传感器。
[0076]
因为深度清洁机器人200可使用来自干式真空吸尘机器人100上的传感器的输入
而不是产生其自己的输入,所以深度清洁机器人200可具有比干式抽吸机器人100更少的传感器。设置在深度清洁机器人200上的一些传感器可以是确定深度清洁机器人200相对于物体的位置的位置控制或定位系统的一部分。例如,定位系统可包括用于距离和位置感测的一个或多个红外(ir)障碍物传感器270。障碍物传感器270可安装到自主单元212的外壳,诸如在单元212的前面,以确定到深度清洁机器人200前方的障碍物的距离。当检测到物体时,来自障碍物传感器270的输入可用于减慢和/或调整单元212的路线。
[0077]
还可设置碰撞传感器274以确定对单元212的前方或侧面撞击。碰撞传感器274可与单元212的外壳上的缓冲器集成。来自碰撞传感器274的输出信号向控制器228提供输入以选择障碍物避免算法。
[0078]
除了障碍物270和碰撞传感器274之外,定位系统可任选地包括用于提供尚未由干式真空吸尘机器人100上的传感器提供的输入的附加的传感器,包括一个或多个悬崖传感器280和/或提升传感器282。悬崖传感器280可以是面向底部的光学位置传感器,其提供距离反馈并且控制单元212,使得单元212可避免诸如楼梯井或壁架的过多下降。除了光学传感器之外,悬崖传感器280可以是机械传感器或超声波传感器。提升传感器282检测单元212何时抬离待清洁表面,诸如当用户拿起深度清洁机器人200时。该信息作为输入提供给控制器228,控制器228将停止泵马达205、电刷马达242、真空马达216和轮马达231的操作。提升传感器还可检测单元何时与待清洁表面接触,诸如当用户将机器人放回地面上时;在此类输入时,控制器可恢复泵马达205、电刷马达242、真空马达216和轮马达231的操作。应注意的是,还可提供附加的传感器,诸如用于干式真空吸尘机器人100的如上所述的一个或多个侧壁传感器或加速度计。
[0079]
虽然未示出,但是深度清洁机器人200可任选地包括用于检测供应箱206和回收箱208的存在的一个或多个传感器。例如,可设置用于检测供应箱206和回收箱208的重量的一个或多个压力传感器。该信息作为输入提供给控制器228,这可防止深度清洁机器人200的操作,直到正确安装供应箱206和回收箱208。控制器228还可指示显示器256向用户提供供应箱206或回收箱208缺失的通知。
[0080]
例如,深度清洁机器人200还可包括与控制器228可操作地耦合并且被配置成通过无线全球、本地和/或个人区域网络(诸如蓝牙连接)与其它设备进行通信的一个或多个无线电设备290。在一个示例中,深度清洁机器人200可通过无线电设备290接收来自干式真空吸尘机器人100的数据,诸如全部或部分房间地图、污渍路径点、状态、结果、清洁计划和/或用于操纵到期望位置的其它指令。
[0081]
深度清洁机器人200还可包括一个或多个ir收发器292,用于与诸如干式真空吸尘机器人100、对接站10和/或人造屏障系统20的外围设备进行通信。深度清洁机器人200上的一个或多个ir收发器292和相关联的外围设备(即,干式真空吸尘机器人100)上的对应收发器(即,ir收发器192)可建立在基于频率的通信协议上,使得每对相关联的ir收发器292、192可被配置成传送可包括具有预定义的响应的各种不同的指令的不同的代码集。例如,对应对的ir收发器292、192可被配置成将深度清洁机器人200引导到对接站10或指定位置以清洁污渍,将深度清洁机器人200限制在指定区域内,或者使深度清洁机器人200能够跟随干式真空吸尘机器人100到达期望的位置。
[0082]
图6是描绘使用系统8的操作方法的示意图。该方法可开始于干式真空吸尘机器人
100的操作以真空清洁地板表面18。例如,干式真空吸尘机器人100可横穿地板表面18上的第一路径16,其可如位置100a所示开始。
[0083]
干式真空吸尘机器人100可包括用于在沿第一路径16行进时检测污渍26的污渍感测系统。例如,干式真空吸尘机器人100可使用地板状况传感器(包括ir污物传感器185、污渍传感器186、气味传感器187和/或湿垃圾传感器188)中的一个或多个检测地板表面18上的至少一个污渍26(图3)。在位置100b处示出了这种检测位置。示例性传感器可检测污渍26的尺寸和/或形状,污渍26的类型(例如:食物、酒、红色染料、土壤或宠物或其它有机污渍)以及地板18型(例如:地毯、瓷砖、硬木、油毡等)。美国专利no.5,613,261、美国专利no.8,719,998、wo2017/032718a1和wo2017/016813a1中公开了地板状况传感器的示例,这些专利全文都以引用方式并入本文。
[0084]
干式真空吸尘机器人100可包括导航系统,该导航系统被配置成用于沿着与第一路径16不同的路径引导深度清洁机器人200移动到污渍26。与第一路径16不同的路径可包括路径,该路径包括与第一路径16不同的线路或路线。例如,干式真空吸尘机器人100可经由无线无线电设备190(图3)、290(图5)将关于污渍26和地板表面18的信息传送到深度清洁机器人200。另选地,干式真空吸尘机器人100可使用关于污渍26和地板表面18的信息来确定适合于污渍26的清洁周期,并且可经由无线电设备190、290向深度清洁机器人200发送指令以执行清洁周期。此外,与第一路径16不同的路径可包括与第一路径相同但在不同时间发生的路径,使得深度清洁机器人200不仅仅跟随干式真空吸尘机器人100。可设想的是,深度清洁机器人200可沿着路径被引导,该路径与干式真空吸尘机器人100采用的路径在时间、线路、起始目的地、沿着路线的路径点方面不同。
[0085]
干式真空吸尘机器人100还可标记污渍的位置。例如,干式真空吸尘机器人100可保持在污渍26处或附近并且指示深度清洁机器人200操纵到该位置。
[0086]
在另一个示例中,干式真空吸尘机器人100可将可重复使用的物理标记(诸如无线信标24)部署在污渍26上或附近以标记其位置,该深度清洁机器人200可使用该位置来定位污渍26用于最终深度清洁。这已经在图6中示出。信标24可操作地耦合到深度清洁机器人200控制器228,使得信标24可将深度清洁机器人200引导到污渍26的位置。
[0087]
在一个示例中,信标24可发射诸如射频(rf)信号的信号,该信号可以是全向的或定向的信号,用于将深度清洁机器人200引导到目标位置。另选地,信标24可发射脉冲光信号,该脉冲光信号可包括可见或近可见电磁波谱中的波长,用于将深度清洁机器人200引导到目标位置。
[0088]
在一个示例中,无线信标24可包括用于传输信号的射频识别(rfid)标签(未示出),并且深度清洁机器人200rfid阅读器213(图4)可读取和解释来自rfid标签的信号。rfid阅读器可使用来自rfid标签的信号以监视rfid标签的位置并且将深度清洁机器人200引导到由信标24标记的目标位置。另选地,干式吸尘式清洁机器人100可包括rfid读取器,并且干式真空吸尘机器人100可经由无线电设备190、290将深度清洁机器人200引导到由信标24标记的目标位置。
[0089]
rfid标签可包括具有集成电路的应答器以及用于从rfid读取器213发射的信号接收电磁能并且用于将信号传输回读取器213的天线。例如,rfid标签可被附接或模制到诸如塑料芯片或聚酯薄膜的基板中。rfid标签还可包括无源配置或有源配置。有源rfid标签包
含诸如电池的板上电源,而无源rfid标签不包括电源,而是从rfid标签读取器213的扫描天线发射的电磁场获取电力。有源rfid标签和无源rfid标签之间的主要区别在于信号广播范围。有源rfid标签的信号广播范围通常可在约100-300英尺的范围内;远大于无源rfid标签的典型范围,其大约高达20英尺。
[0090]
干式真空吸尘机器人100还可包括用于在目标位置处部署信标24的部署系统。信标部署系统可将一个或多个信标24存储在干式真空吸尘机器人100上,并且可选择性地将信标24部署在目标位置处(诸如在污渍26处)。部署系统可包括信标保持器101(图2),信标保持器101可被配置成检索已经部署的信标24或者将信标固定到干式真空吸尘机器人并且可选择性地在期望的目标位置处释放信标。例如,保持器101可包括机械耦合器,诸如钩、夹具或磁性耦合器。以下参考图11a-图13讨论信标部署系统的一些示例。
[0091]
另选地,污渍26的位置以及其它环境特征(诸如壁19和物体的位置、温度、地板类型等)可相对于从干式真空吸尘机器人起始位置建立的内部坐标系存储。
[0092]
在干式真空吸尘机器人100标记污渍26的位置之后,深度清洁机器人200被引导到污渍26。例如,如果干式真空吸尘机器人100通过保留在污渍处来标记污渍26的位置,则干式真空吸尘机器人100可使用存储在深度清洁机器人200的存储器268中的红外信号跟随算法发射深度清洁机器人200可遵循的红外信号。
[0093]
转到图7,如果干式真空吸尘机器人100已经部署了信标24,诸如例如无源rfid标签,则干式真空吸尘机器人100可与深度清洁机器人200进行通信,如与路径16不同的路径17a所示,指示其行进到信标24,并且执行预定的深度清洁操作。由深度清洁机器人的rfid读取器213发射的电磁场启动信标24的rfid标签,其然后可将信号往回发射到深度清洁机器人200的rfid读取器213。rfid阅读器213接收并解释信号并且将位置信息提供到深度清洁机器人200的控制器228,控制器228然后将深度清洁机器人200引导到信标24的位置。
[0094]
在另一个示例中,如果干式真空吸尘机器人100已经将污渍26的位置保存到其存储器168中,则干式真空吸尘机器人100可将一系列导航指令或指导发送或发射到深度清洁机器人200,用于深度清洁机器人200引导深度清洁机器人移动到污渍(即向前转动4轮、向左转30度、向前转动8轮、停止)。深度清洁机器人200可在对接站10处时接收指导。另选地,干式真空吸尘机器人100可监视深度清洁机器人200的位置并且提供动态导航指令(即前进、右转、前进、减速、停止),而不是提供一组固定指令。
[0095]
如图8所示,一旦在污渍处,深度清洁机器人200就可执行由干式真空吸尘机器人100发送的操作周期。操作周期可包括适用于污渍26的特定运动模式、溶液量、溶液停留时间、刷子操作时间和/或抽取时间。运动模式的示例包括:(a)围绕轮230之间的设定点的圆形图案;(b)在通道之间具有任选的重叠以实现期望的覆盖直径的向外增加的螺旋图案;(c)在通道之间具有任选的重叠以实现期望的覆盖宽度的直线前/后图案;(d)围绕圆横向移动的前/后图案;以及(e)前述模式的任何组合。运动模式还可具有一个或多个无运动的时段,以使清洁流体在污渍26上停留一段时间。
[0096]
当深度清洁机器人200正在执行运动模式时,根据操作周期可选择性地接合喷射、抽取和刷洗特征部。例如,清洁模式可先进行喷涂和刷洗,然后停留一段时间,然后进行抽取。在整个清洁周期中,可进一步选择性地调整刷洗速度和喷射流量。
[0097]
另选地,深度清洁机器人200可使用关于由干式真空吸尘机器人100确定的污渍26
和地板表面18类型的信息来相应地清洁污渍26。例如,深度清洁机器人200可选择适合污渍26和地板表面18类型的特定运动模式、溶液量、溶液停留时间、刷子操作时间和/或抽取时间。
[0098]
在干式真空吸尘机器人100的操作期间,干式真空吸尘机器人100可检测或定位地板表面18上的多于一种污渍。干式真空吸尘机器人100可被配置成部署用于多个污渍26的一组信标24。系统8可被配置成部署深度清洁机器人200以在被定位时处理每个污渍26,或者可由干式真空吸尘机器人100记录污渍26的编辑列表,并且一旦干式真空吸尘完成,深度清洁机器人200可被部署以按连续的顺序处理每个污渍26。
[0099]
应注意的是,用户可选具有单独使用深度清洁机器人200来处理污渍26的选择。例如,用户可在不使用干式真空吸尘机器人100的情况下识别污渍26,并且可将深度清洁机器人200运送到污渍26并且开始清洁循环以处理污渍26。在另一个实施例中,用户可使用ir指示器(未示出)将深度清洁机器人200引导到污渍26,该ir指示器使用存储在深度清洁机器人200的存储器268中的红外信号跟随算法发射深度清洁机器人200可跟随的红外信号。在又一个示例中,用户可发送或以其它方式将导航指令输入到深度清洁机器人200以行进到污渍26。
[0100]
转到图9,深度清洁机器人200可被配置成检索信标24。例如,深度清洁机器人200可包括配置成取回信标24的信标保持器235。例如,保持器235可包括机械耦合器,诸如钩、夹具或磁性耦合器。深度清洁机器人200可在清洁周期完成时检索信标24,以如位置200d所示处理污渍26。另选地,深度清洁机器人200可在完成清洁周期之前检索信标24以处理污渍26。另选地,干式真空吸尘机器人100可检索信标24来代替深度清洁机器人200。例如,干式真空吸尘机器人100可在深度清洁机器人200完成操作的清洁周期时检索信标24以处理污渍26。如前所述,干式真空吸尘机器人100的信标部署系统可被配置成检索已经部署的信标24。
[0101]
图10是深度清洁机器人200e在完成机器人归航过程中的清洁周期时返回到对接站10的示意图,如路径17b所示。控制器228(图5)可接收来自干式真空吸尘机器人100的导航/映射系统和/或污渍感测系统的输入,用于引导驱动系统将深度清洁机器人200e移动到对接站10,使得深度清洁机器人处于对接位置200f。另选地,深度清洁机器人200存储器268(图5)可存储来自干式真空吸尘机器人100和深度清洁机器人200上的各种传感器的输入,以将深度清洁机器人200引导到对接站10。机器人200还有可能打开其ir收发器292(图5)并且搜索由对接站10上的收发器11(图9)发射的对应的ir信号,该ir信号可用于将深度清洁机器人200引导到对接位置200f,诸如通过发射信号来指示深度清洁机器人200向左、向右或朝向码头10直线操纵。
[0102]
图11a是用于干式真空吸尘机器人100的信标部署系统的一个示例的示意图。在图11a中,保持器101(图2)可包括在干式真空吸尘机器人100上的钩193,钩193被配置成捕捉在信标24中形成的对应的凹槽或狭槽27。图11a示出了处于保持位置的信标。诸如螺线管活塞194的致动器可被配置成选择性地将信标24从钩193推离或下降到图11b中所示的目标位置上。目标位置可包括污渍26上或污渍26附近(图6)。
[0103]
图12是用于干式真空吸尘机器人100的信标部署系统的另一个示例的示意图。在图12中,保持器101(图2)可包括夹具196,夹具196还包括一对臂198,该臂枢转地安装到干
式真空吸尘机器人100的外壳112并且被配置成选择性地夹紧和松开信标24。臂198可安装到竖直取向的枢轴销197并且可操作地连接到螺线管致动器195,螺线管致动器195被配置成向内枢转臂198以夹紧信标24并向外以释放和部署信标24。
[0104]
图13是用于干式真空吸尘机器人100的信标部署系统的另一个示例的示意图。在图13中,保持器101(图2)可包括在干式真空吸尘机器人100上的磁性耦合器,该磁性耦合器被配置成吸引并保持具有一个或多个磁体28的磁化的信标24,并且选择性地排斥信标24以将其部署在目标位置处。在一种配置中,干式真空吸尘机器人上的磁性耦合器可包括一个或多个电磁体199,该电磁体被配置成选择性地反转极性以排斥和部署磁化的信标24。
[0105]
图14是根据本文所述的各个方面的自主地板清洁系统的另一个示例的示意图。该系统可与系统8基本上相同,除了在本实例中,深度清洁机器人1200设置有导航/映射系统1268,导航/映射系统1268可与针对干式吸尘机器人100所描述的导航/映射系统168基本上相同。如前所述,干式真空吸尘机器人1100包括控制器1128,控制器1128可接收来自并控制干式真空吸尘机器人1100的各种部件(诸如真空收集系统1111、驱动系统1113和导航/映射系统1168)的输入。同样,深度清洁机器人1200包括控制器1228,控制器1228可接收来自深度清洁机器人1200的各种部件(诸如流体供应系统1210、驱动系统1213和流体回收系统1212)的输入,并且控制所述部件。在该示例中,干式真空吸尘机器人1100可利用深度清洁机器人1200产生并且共享到一个或多个污渍位置的地图40。仍然可通过干式真空吸尘机器人1000执行污渍检测,并且可如前所述将由污渍感测系统1186检测到的污渍/地板信息从干式吸尘器1100传送到深度清洁机器人1200。在这里,干式真空吸尘机器人1100可将地图40或污渍路径点发送到深度清洁机器人1200,并且深度清洁机器人1200可将自己引导到污渍位置。虽然未示出,但是对接站10和人造屏障20可包括在系统8中。
[0106]
图15是根据本文所述的各个方面的自主地板清洁系统2008的另一个示例的示意图。系统2008可与系统8基本上相同,除了系统包括与干式真空吸尘机器人2100和深度清洁机器人2200中的一个或两个进行通信的个人通信设备2300。个人通信设备2300可包括但不限于诸如智能手机或平板的移动通信设备,或者诸如膝上型计算机的个人计算机。虽然未示出,但是对接站10和人造屏障20可包括在系统2008中。
[0107]
在一个示例中,通信设备2300可包括包含用户的地板的地图的软件程序或应用程序。干式真空吸尘机器人2100使用航位推算过程、碰撞传感器撞击、长距离感测过程、三角测量或其任何组合可生成地图。用户可通过应用程序选择机器人2100、2200中的一个或两个要清洁的位置,并且可进一步输入信息或做出关于要实现的清洁周期的选择。
[0108]
在通信设备2300包括照相机的另一个示例中,用户可在地板表面18上拍摄污渍26(图6)的图像,并且应用程序可使用图像来控制机器人2100、2200中的一个或两个来清洁污渍26。应用程序可进一步被配置成相对于地图定位通信设备2300,并且当通信设备2300被保持在污渍26上方时可瞄准污渍26。应用程序可被配置成允许用户勾画图像中污渍26的边界,这可帮助应用程序确定污渍26的确切位置和尺寸。
[0109]
在又一个示例中,通信设备2300可与另一个消费产品(诸如直立式真空吸尘器)上的传感器耦合,并且传感器可向通信设备2300提供污渍信息,该通信设备2300又可将信息发送到深度清洁机器人200以处理污渍。
[0110]
在又一个示例中,通信设备2300可与干式真空吸尘机器人2100和深度清洁机器人
2200耦合。干式真空吸尘机器人2100可将污损信息(包括例如存储在地图40中的由污损感测系统1186检测到的污渍路径点)传输到通信设备2300。然后用户可确定是否采取进一步的动作,例如,诸如将深度清洁机器人2200部署到污渍,或者手动地清洁污渍。
[0111]
图16是描绘使用系统8的操作方法的另一个示例的流程图。干式真空吸尘机器人100可被配置成检测地板表面18上的诸如湿点或液体溢出、颜色变化、气味变化或严重污染区域等异常。因为干式真空吸尘机器人100未被配置成收集液体,所以吸取液体有损坏真空马达116的可能性。在操作400期间,如果干式真空吸尘机器人100检测到此类异常410,则可部署深度清洁机器人200以采取适当的动作420。在液体溢出的情况下,这可包括通过抽吸入口214吸取液体以清除干式真空吸尘机器人100的障碍以恢复其操作。如上所述,深度清洁机器人200解决异常的部署可基本上类似于深度清洁机器人2000处理污渍的部署的任何示例。
[0112]
本文所述的方面的益处可包括自主地板清洁系统,其中主要机器人包括全映射、导航和污渍感测技术和硬件。然而,辅助机器人可以是没有这些特征部的较不智能的机器人,而是被配置成利用主要机器人的映射、导航和污渍感测。这提供了具有更大范围清洁能力的有利的自主地板清洁系统,同时避免了某些部件的重复,因此与两个全特征机器人相比提供了更低成本的解决方案。
[0113]
虽然本文所示的各种实施例示出了自主或机器人清洁器,但是本发明的各方面可在包括非自主清洁器的其它类型的地板清洁器上使用。例如,干式吸尘器可被实现为用于定位和检测污渍的非自主真空吸尘器,其中当用户正在真空吸尘时检测到污渍时,选择性地部署深度清洁机器人。
[0114]
在尚未描述的程度上,机器人的各种实施例的不同特征和结构可根据需要彼此组合使用。在所有实施例中可未示出一个特征不意味着被解释为其不能,而是为了描述的简洁而做出的。因此,机器人的不同实施例的各种特征可根据需要混合和匹配以形成新的实施例,无论是否明确描述了新的实施例。例如,深度清洁机器人可以是主要的、更智能的机器人,并且干式真空吸尘机器人可以是辅助的、不太智能的机器人。
[0115]
虽然已经结合本发明的某些具体实施例具体描述了本发明,但应当理解,这是作为说明而不是限制。在不偏离在所附权利要求中限定的本发明的精神的情况下,合理的变化和修改在前述公开内容和附图的范围内是有可能的。因此,与本文公开的实施例有关的具体尺寸和其它物理特性不应被认为是限制性的,除非权利要求另有明确说明。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1