一种混合型中药自动精量抓取装置的使用方法与流程
1.本发明涉及中药抓取技术领域,具体涉及一种混合型中药自动精量抓取装置的使用方法。
2.
背景技术:
3.目前,随着社会的发展,人们日常生活离不开中药的治疗,在中药抓取时,根据药方抓取不同种类的药材和不同重量,一般有人工手动抓取,但是这种方式抓取效率低,费时费力,尤其是在病人很多时,人工抓取耗时长,可能会耽误病人的治疗时间,这也会增加工作人员的劳动强度,人工抓取可能存在抓取重量不准确的问题,影响药效和病人的治疗效果。
4.我国专利申请号:cn202010209760.9;公开日:2020.06.12公开了一种中药自动称量抓取设备,包括机体,包括机体和药柜,药柜中滑动连接有抽屉,机体中设有齿轮腔,齿轮腔上侧设有移动腔,移动腔上侧设有带动腔,齿轮腔中使用水平移动的平移装置,此设备能够自动快速地抓取所需药材,高效准确,减少了工作人员的抓取时间和病人的等待时间,减轻工作人员的劳动强度,也能够保证药材质量精准。
5.我国专利申请号:cn201810730372.8;公开日:2018.11.09公开了一种中药抓取设备,包括固定板部分、多个装药材部分、两个抓药部分、两个称药及运输部分、两个横滑杆部分、两个竖滑杆部分,其特征在于:首先把药材放进对应的药材抽屉中,当抓药时在电脑里输入对应的药材和需要的量之后,通过横滑杆部分上下移动到需要抓药的那一排,称药及运输部分移动到需要打开的装药材部分前面,然后打开药材抽屉,通过抓药部分铲起药材倒进药材盒中需要的量,然后返回到底面,人工取出药材盒中的药材,使其工作效率更高,可以更准确的抓取不同分量的中药,更方便的完成了抓药工作,实现了中医的自动化抓药。
6.以上两个发明的结构存在以下不足:1.抓取过程复杂,步骤繁多,且在抓取多种类型的中药时耗费的时间较多,浪费了大量时间,因而致使抓取效率较低。
7.2.当控制抓手张开时,由于两个抓手的端部倾斜角度较大,且包裹性较差,因而中药容易从两个抓手之间快速掉落,致使药量无法将精确抓取,进而降低了抓取精度。
8.根据现有技术的不足,因而有必要设计一种抓取过程简单快捷,步骤较少,有利于提高抓取效率,同时能精确控制器抓药量,防止出现误差的抓取混合型中药自动精量抓取装置及使用方法。
9.
技术实现要素:
10.本发明的目的在于提供一种混合型中药自动精量抓取装置及使用方法。
11.为达此目的,本发明采用以下技术方案:
提供一种混合型中药自动精量抓取装置,包括底座,还包括控制器、升降机构、滑动机构、钩取机构和抓取机构,所述滑动机构设在底座的顶部以支持抓取机构滑动,滑动机构包括滑板、驱动组件和两个导轨,两个导轨呈对称设置在底座的顶部,所述滑板滑动设置在两个导轨的顶部,所述驱动组件设在的顶部,所述升降机构设在滑板的顶部以用来支持抓取机构升降,升降机构包括升降板和传动组件,滑板的顶部呈竖直设有立板,所述控制器固定设在立板的外壁上,所述升降板滑动设置在立板的内壁上,所述传动组件设在立板的外壁上,所述钩取机构设在升降板的顶部以用来启闭柜子,钩取机构包括钩板和伸缩组件,所述伸缩组件设在升降板的顶部,所述钩板固定设在伸缩组件上,所述抓取机构包括推送组件、夹持组件和两个抓铲,所述推送组件插设在升降板远离立板的一端,所述夹持组件设在推送组件的底部,两个抓铲均滑动设置在推送组件上,并且两个抓铲均与夹持组件传动连接,所述驱动组件、传动组件、伸缩组件、推送组件和夹持组件与控制器均为电性连接。
12.进一步的,所述推送组件包括长轴气缸、推板和两个限位杆,所述长轴气缸呈竖直插设在升降板远离立板的一端,所述推板固定设在长轴气缸的输出端上,两个限位杆呈对称设置在升降板远离立板的一端,并且每个限位杆的底部均与推板的顶部固定连接,所述长轴气缸与控制器电连接。
13.进一步的,所述传动组件包括驱动电机、第一齿条和第一齿轮,所述驱动电机固定设在立板的外壁上,所述第一齿轮套设在驱动电机的输出端上,升降板靠近立板的底部一端固定设有滑块,所述滑块与立板滑动连接,所述第一齿条固定设在滑块远离升降板的一端,并且第一齿条和第一齿轮啮合连接,所述驱动电机与控制器电连接。
14.进一步的,所述夹持组件包括第二齿轮、步进电机和两个第二齿条,所述步进电机呈竖直设在推板的顶部,步进电机的输出端穿过推板,所述第二齿轮套设在步进电机的输出端上,两个第二齿条分别固定设在两个抓铲的顶部,并且两个第二齿条均与第二齿轮啮合连接,所述步进电机与控制器电连接。
15.进一步的,每个抓铲的底部均为斜角结构,并且每个抓铲的底部一端外壁上均开设有出料口,所述出料口的内壁上滑动设有挡板,每个抓铲的外壁上均固定设有微型电动推杆,所述微型电动推杆的输出端与挡板固定连接,每个抓铲的内侧底部均安装有称重传感器,每个称重传感器和每个微型电动推杆均与控制器电连接。
16.进一步的,所述伸缩组件包括电动推杆、拉块和限位板,所述电动推杆固定设在升降板的顶部,所述拉块固定设在电动推杆的输出端上,所述限位板固定设在升降板的顶部,并且电动推杆的输出端与限位板插接,所述电动推杆与控制器电连接。
17.进一步的,所述拉块的底部呈对称设置有挡块和限位块,所述钩板的顶部与挡块的顶部铰接,并且钩板和限位块之间呈对称设置有两个伸缩弹簧,钩板的顶部一端和限位块的底部一端分别与一个伸缩弹簧的两端固定连接,并且钩板的底部为楔形结构。
18.进一步的,所述驱动组件包括伺服电机、丝杆和两个支撑板,底座的顶部固定设有安装板,所述伺服电机固定设在安装板的外壁上,两个支撑板呈对称设置在底座的顶部,所述丝杆可转动的设置在两个支撑板之间,并且伺服电机的输出端穿过安装板与丝杆的一端固定连接,滑板的底部与丝杆螺纹连接,所述伺服电机与控制器电连接。
19.进一步的,所述立板远离驱动电机的一端外壁上固定设有横板,升降板靠近立板的一端呈对称设置有两个滑条,立板上开设有可供两个滑条滑动的滑槽,横板远离立板的
顶部一端和每个滑槽的内部均呈竖直设有导向杆,每个滑条的内部和升降板远离立板的一端内壁上均插设有直线轴承,每个导向杆均与一个直线轴承插接。
20.一种混合型中药自动精量抓取装置的使用方法,包括以下步骤:s1:柜子的开启:通过控制器启动电动推杆,从而使其输出端向靠近中药柜的一端伸出,由于拉块与其输出端固定连接,因而带动拉块向靠近中药柜的一端伸出,限位板起到限位作用,保证拉块伸缩平稳,当拉块向靠近中药柜的一端伸出时,其底部的钩板会与柜子上把手触碰,由于钩板与挡块铰接,因而钩板会朝着远离挡块的一端旋转,此时两个伸缩弹簧受到钩板旋转时产生的抵触力自动收缩,从而使得钩板由竖直状态转变为倾斜状态并对把手进行避让,即进入把手的内圈,进入把手内圈后,钩板与把手的抵触力消失,两个伸缩弹簧复位,从而带动钩板复位,即由倾斜状态转变为竖直状态,然后再通过控制器带动电动推杆的输出端收缩,利用钩板与把手内圈的抵触力将柜子从中药柜拉出,需要说明的是,此时产生的抵触力,是由于钩板拉动把手时,挡块对钩板进行遮挡给予的。
21.s2:中药的抓取:柜子从中药柜拉出后,正好位于推送组件的下方,此时,通控制器启动长轴气缸,从而使其输出端向靠近柜子内部的一端伸出,由于推板与其输出端固定连接,因而带动推板向靠近柜子内部的一端伸出,两个限位杆起到限位作用,保证推板推送平稳,当推板向靠近柜子内部的一端伸出时,由于两个抓铲均与推板滑动连接,因而带动两个抓铲伸入柜子的内部,然后通过控制器启动步进电机,从而带动其输出端上的第二齿轮旋转,由于两个第二齿条分别与两个抓铲的顶部固定连接,每个抓铲均与推板滑动连接,又因为两个第二齿条均与第二齿轮啮合连接,进而带动两个抓铲相互靠近直至贴合,将中药抓取至两个抓铲的内部。
22.s3:中药量的精确控制:中药被抓取至抓铲的内部后,称重传感器进行称重,当检测到中药重量不满足抓取量时,称重传感器将此信号发送给控制器,从而通过控制器启动微型电动推杆,因而通过其输出端带动挡板于出料口内向远离抓铲的一端伸出,进而使得出料口缓慢开启,在此过程中,由于抓铲的内侧底部为斜角结构,因而使得中药从抓铲的内部由出料口向外滑落,当检测到中药剩余量满足抓取量时,通过控制器带动微型电动推杆输出端收缩,从而带动挡板复位,将出料口关闭,停止中药继续滑出,相较于现有技术,一方面,挖铲的内侧底部的倾斜角度设计较小,因此,出料口在开启时,位于其内部的中药的滑落速度较慢,另一方面,由于挖铲的结构包裹性更强,中药只能从出料口由内往外滑落,因而通过控制中药于出料口处的滑出速度,即可控制器中药整体的滑落速度,进而使得中药的抓取量可精确控制,不会因中药滑出过多而产生较大误差。
23.s4:柜子的关闭:中药抓取完毕,通过控制器启动电动推杆,从而使其输出端向靠近柜子的一端伸出,进而利用挡块将其推回至中药柜的内部,然后再通传动组件带动钩板上升与药柜把手内圈脱离。
24.s5:不同位置的中药抓取:由于中药柜内放置的中药各不相同,柜子的位置也各不相同,因而设计驱动组件,
当进行水平方向上的中药抓取时,通过控制器启动伺服电机,从而带动其输出端旋转,由于丝杆与其输出端固定连接,因而带动丝杆于两个支撑板之间旋转,又因为丝杆与滑板的底部螺纹连接,滑板与两个导轨滑动连接,进而带动滑板及其顶部的抓取机构于底座的顶部水平滑动,当抓取机构滑动到所需抓取的装有那味中药的柜子时,通过控制器断电伺服电机停止抓取机构滑动,伺服电机配合丝杆结构,能够使得抓取机构滑动更加精确,进而保证抓药的精确度,有利于提升抓药效率。
25.进行竖直方向上的中药抓取时,通过控制器启动驱动电机,从而通过其输出端带动第一齿轮旋转,由于第一齿条通过滑块与升降板固定连接,滑块与立板滑动连接,又因为第一齿条与滑块固定连接,第一齿轮与第一齿轮啮合连接,进而电动齿条于立板上向下滑动,进而带动立板及其上的抓取机构向下滑动,直至滑动到所需抓取的装有中药的柜子时停止,由于升降板上设计的零部件过多,考虑到其重量问题,设计四个导向杆和四个直线轴承,当升降板通过两个滑条于立板上滑动时,四个导向杆起到限位作用,保证升降板的滑动平稳,四个直线轴承则减少升降板滑动时产生的摩擦力,保证升降板滑动顺畅,进而有利于提升中药的抓取效率。
26.本发明的有益效果:1.本发明通过设计控制器、钩取机构和抓取机构,通过控制器启动钩取机构,将装有中药的柜子从药柜中拉出,然后通过控制器启动抓取机构,将柜子内的中药抓取出来,相较于现有技术,抓取过程简单快捷,步骤较少,且多为自动结构,无需人工过多干预,进而有利于提高中药抓取的效率。
27.2.本发明通过设计夹持组件和两个抓铲,通过控制器启动夹持组件,从而带动两个抓铲相互靠近,将中药从柜子内抓出,同时通过在每个抓铲的外壁上设计出料口,出料口的内部设计挡板,并且设计微型电动推杆,将其输出端与挡板固定连接,在抓铲的内侧底部设计称重传感器,当检测到中药重量不满足抓取量时,称重传感器将此信号发送给控制器,从而通过控制器启动微型电动推杆,因而通过其输出端带动挡板于出料口内向远离抓铲的一端伸出,进而使得出料口缓慢开启,在此过程中,由于抓铲的内侧底部为斜角结构,因而使得中药从抓铲的内部由出料口向外滑落,当检测到中药剩余量满足抓取量时,通过控制器带动微型电动推杆输出端收缩,从而带动挡板复位,将出料口关闭,停止中药继续滑出,相较于现有技术,一方面,挖铲的内侧底部的倾斜角度设计较小,因此,出料口在开启时,位于其内部的中药的滑落速度较慢,另一方面,由于挖铲的结构包裹性更强,中药只能从出料口由内往外滑落,因而通过控制中药于出料口处的滑出速度,即可控制器中药整体的滑落速度,进而使得中药的抓取量可精确控制,不会因中药滑出过多而产生较大误差,实现中药的自动精量抓取。
28.3.本发明通过在拉块的底部设计挡块、限位块和两个伸缩弹簧,并将钩板铰接设置在挡块和限位块之间,在伸缩组件带动拉块向柜子靠近时,两个伸缩弹簧受力收缩,钩板受到柜子上的把手的抵触自动朝着远离挡块的一端旋转,从而对把手进行避让,在进入把手的内圈后,两个伸缩弹簧复位,从而使得钩板钩住柜子的把手,方便柜子从中药柜内拉出,从而方便中药的抓取工作,而在中药抓取完毕,通过控制器启动电动推杆,从而使其输出端向靠近柜子的一端伸出,进而利用挡块将其推回至中药柜的内部,然后再通传动组件带动钩板上升与药柜把手内圈脱离,相较于现有技术,不仅能在抓药过程中将柜子自动拉
出,提升抓药效率,而且能在抓药结束,将柜子有效推回,进一步提升了本装置的实用性。
29.4.本发明通过设计升降机构和滑动结构,能够满足不同类型的中药的不同储放位置的抓取要求,提升了本装置的灵活性和实用性,且滑动机构包括滑板、驱动组件和两个导轨,当抓取机构滑动到所需抓取的装有那味中药的柜子时,通过控制器断电伺服电机停止抓取机构滑动,伺服电机配合丝杆结构,能够使得抓取机构滑动更加精确,进而保证抓药的精确度,有利于提升混合型中药的抓取效率。
30.附图说明
31.为了更清楚地说明本发明实施例的技术方案,下面对本发明实施例中的附图作简单地介绍。
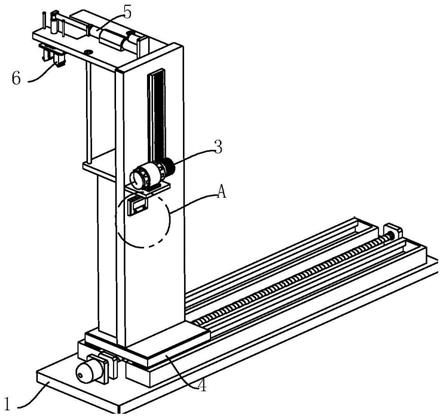
32.图1为本发明的立体结构示意图一;图2为图1中的a处放大图;图3为本发明的立体结构示意图二;图4为图3中的b处放大图;图5为本发明的侧视图;图6为图5中的c处放大图;图7为图5中的d处放大图;图8为本发明推送组件、夹持组件和两个抓铲的立体结构示意图;图9为图8中的e处放大图;图10为本发明立板和升降板的立体分解示意图;图11为图10中的f处放大图;图中:底座1,控制器2,升降机构3,升降板30,滑块300,滑条301,传动组件31,驱动电机310,第一齿条311,第一齿轮312,滑动机构4,滑板40,立板400,横板401,导向杆402,驱动组件41,伺服电机410,丝杆411,支撑板412,导轨42,钩取机构5,钩板50,伸缩组件51,电动推杆510,拉块511,限位板512,挡块513,限位块514,伸缩弹簧515,抓取机构6,推送组件60,长轴气缸600,推板601,限位杆602,夹持组件61,第二齿轮610,步进电机611,第二齿条612,抓铲62,挡板620,微型电动推杆621,称重传感器622。
33.具体实施方式
34.下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
35.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸。
36.参照图1至图11所示的一种混合型中药自动精量抓取装置,包括底座1,还包括控制器2、升降机构3、滑动机构4、钩取机构5和抓取机构6,所述滑动机构4设在底座1的顶部以支持抓取机构6滑动,滑动机构4包括滑板40、驱动组件41和两个导轨42,两个导轨42呈对称设置在底座1的顶部,所述滑板40滑动设置在两个导轨42的顶部,所述驱动组件41设在的顶
部,所述升降机构3设在滑板40的顶部以用来支持抓取机构6升降,升降机构3包括升降板30和传动组件31,滑板40的顶部呈竖直设有立板400,所述控制器2固定设在立板400的外壁上,所述升降板30滑动设置在立板400的内壁上,所述传动组件31设在立板400的外壁上,所述钩取机构5设在升降板30的顶部以用来启闭柜子,钩取机构5包括钩板50和伸缩组件51,所述伸缩组件51设在升降板30的顶部,所述钩板50固定设在伸缩组件51上,所述抓取机构6包括推送组件60、夹持组件61和两个抓铲62,所述推送组件60插设在升降板30远离立板400的一端,所述夹持组件61设在推送组件60的底部,两个抓铲62均滑动设置在推送组件60上,并且两个抓铲62均与夹持组件61传动连接,所述驱动组件41、传动组件31、伸缩组件51、推送组件60和夹持组件61与控制器2均为电性连接。
37.所述推送组件60包括长轴气缸600、推板601和两个限位杆602,所述长轴气缸600呈竖直插设在升降板30远离立板400的一端,所述推板601固定设在长轴气缸600的输出端上,两个限位杆602呈对称设置在升降板30远离立板400的一端,并且每个限位杆602的底部均与推板601的顶部固定连接,所述长轴气缸600与控制器2电连接,当柜子从中药柜拉出后,正好位于推送组件60的下方,此时,通控制器2启动长轴气缸600,从而使其输出端向靠近柜子内部的一端伸出,由于推板601与其输出端固定连接,因而带动推板601向靠近柜子内部的一端伸出,两个限位杆602起到限位作用,保证推板601推送平稳。
38.所述传动组件31包括驱动电机310、第一齿条311和第一齿轮312,所述驱动电机310固定设在立板400的外壁上,所述第一齿轮312套设在驱动电机310的输出端上,升降板30靠近立板400的底部一端固定设有滑块300,所述滑块300与立板400滑动连接,所述第一齿条311固定设在滑块300远离升降板30的一端,并且第一齿条311和第一齿轮312啮合连接,所述驱动电机310与控制器2电连接,当进行竖直方向上的中药抓取时,通过控制器2启动驱动电机310,从而通过其输出端带动第一齿轮312旋转,由于第一齿条311通过滑块300与升降板30固定连接,滑块300与立板400滑动连接,又因为第一齿条311与滑块300固定连接,第一齿轮312与第一齿轮312啮合连接,进而电动齿条于立板400上向下滑动,进而带动立板400及其上的抓取机构6向下滑动,直至滑动到所需抓取的装有中药的柜子时停止。
39.所述夹持组件61包括第二齿轮610、步进电机611和两个第二齿条612,所述步进电机611呈竖直设在推板601的顶部,步进电机611的输出端穿过推板601,所述第二齿轮610套设在步进电机611的输出端上,两个第二齿条612分别固定设在两个抓铲62的顶部,并且两个第二齿条612均与第二齿轮610啮合连接,所述步进电机611与控制器2电连接,当推板601向靠近柜子内部的一端伸出时,由于两个抓铲62均与推板601滑动连接,因而带动两个抓铲62伸入柜子的内部,然后通过控制器2启动步进电机611,从而带动其输出端上的第二齿轮610旋转,由于两个第二齿条612分别与两个抓铲62的顶部固定连接,每个抓铲62均与推板601滑动连接,又因为两个第二齿条612均与第二齿轮610啮合连接,进而带动两个抓铲62相互靠近直至贴合,将中药抓取至两个抓铲62的内部。
40.每个抓铲62的底部均为斜角结构,并且每个抓铲62的底部一端外壁上均开设有出料口,所述出料口的内壁上滑动设有挡板620,每个抓铲62的外壁上均固定设有微型电动推杆621,所述微型电动推杆621的输出端与挡板620固定连接,每个抓铲62的内侧底部均安装有称重传感器622,每个称重传感器622和每个微型电动推杆621均与控制器2电连接,当中药被抓取至抓铲62的内部后,称重传感器622进行称重,当检测到中药重量不满足抓取量
时,称重传感器622将此信号发送给控制器2,从而通过控制器2启动微型电动推杆621,因而通过其输出端带动挡板620于出料口内向远离抓铲62的一端伸出,进而使得出料口缓慢开启,在此过程中,由于抓铲62的内侧底部为斜角结构,因而使得中药从抓铲62的内部由出料口向外滑落,当检测到中药剩余量满足抓取量时,通过控制器2带动微型电动推杆621输出端收缩,从而带动挡板620复位,将出料口关闭,停止中药继续滑出,相较于现有技术,一方面,挖铲的内侧底部的倾斜角度设计较小,因此,出料口在开启时,位于其内部的中药的滑落速度较慢,另一方面,由于挖铲的结构包裹性更强,中药只能从出料口由内往外滑落,因而通过控制中药于出料口处的滑出速度,即可控制器2中药整体的滑落速度,进而使得中药的抓取量可精确控制,不会因中药滑出过多而产生较大误差,当中药抓取完毕,通过控制器2启动电动推杆510,从而使其输出端向靠近柜子的一端伸出,进而利用挡块513将其推回至中药柜的内部,然后再通传动组件31带动钩板50上升与药柜把手内圈脱离。
41.所述伸缩组件51包括电动推杆510、拉块511和限位板512,所述电动推杆510固定设在升降板30的顶部,所述拉块511固定设在电动推杆510的输出端上,所述限位板512固定设在升降板30的顶部,并且电动推杆510的输出端与限位板512插接,所述电动推杆510与控制器2电连接,当进行抓药时,首先通过控制器2启动电动推杆510,从而使其输出端向靠近中药柜的一端伸出,由于拉块511与其输出端固定连接,因而带动拉块511向靠近中药柜的一端伸出,限位板512起到限位作用,保证拉块511伸缩平稳。
42.所述拉块511的底部呈对称设置有挡块513和限位块514,所述钩板50的顶部与挡块513的顶部铰接,并且钩板50和限位块514之间呈对称设置有两个伸缩弹簧515,钩板50的顶部一端和限位块514的底部一端分别与一个伸缩弹簧515的两端固定连接,并且钩板50的底部为楔形结构,当拉块511向靠近中药柜的一端伸出时,其底部的钩板50会与柜子上把手触碰,由于钩板50与挡块513铰接,因而钩板50会朝着远离挡块513的一端旋转,此时两个伸缩弹簧515受到钩板50旋转时产生的抵触力自动收缩,从而使得钩板50由竖直状态转变为倾斜状态并对把手进行避让,即进入把手的内圈,进入把手内圈后,钩板50与把手的抵触力消失,两个伸缩弹簧515复位,从而带动钩板50复位,即由倾斜状态转变为竖直状态,然后再通过控制器2带动电动推杆510的输出端收缩,利用钩板50与把手内圈的抵触力将柜子从中药柜拉出,需要说明的是,此时产生的抵触力,是由于钩板50拉动把手时,挡块513对钩板50进行遮挡给予的。
43.所述驱动组件41包括伺服电机410、丝杆411和两个支撑板412,底座1的顶部固定设有安装板,所述伺服电机410固定设在安装板的外壁上,两个支撑板412呈对称设置在底座1的顶部,所述丝杆411可转动的设置在两个支撑板412之间,并且伺服电机410的输出端穿过安装板与丝杆411的一端固定连接,滑板40的底部与丝杆411螺纹连接,所述伺服电机410与控制器2电连接,由于中药柜内放置的中药各不相同,柜子的位置也各不相同,因而设计驱动组件41,当进行水平方向上的中药抓取时,通过控制器2启动伺服电机410,从而带动其输出端旋转,由于丝杆411与其输出端固定连接,因而带动丝杆411于两个支撑板412之间旋转,又因为丝杆411与滑板40的底部螺纹连接,滑板40与两个导轨42滑动连接,进而带动滑板40及其顶部的抓取机构6于底座1的顶部水平滑动,当抓取机构6滑动到所需抓取的装有那味中药的柜子时,通过控制器2断电伺服电机410停止抓取机构6滑动,伺服电机410配合丝杆411结构,能够使得抓取机构6滑动更加精确,进而保证抓药的精确度,有利于提升抓
药效率。
44.所述立板400远离驱动电机310的一端外壁上固定设有横板401,升降板30靠近立板400的一端呈对称设置有两个滑条301,立板400上开设有可供两个滑条301滑动的滑槽,横板401远离立板400的顶部一端和每个滑槽的内部均呈竖直设有导向杆402,每个滑条301的内部和升降板30远离立板400的一端内壁上均插设有直线轴承,每个导向杆402均与一个直线轴承插接,由于升降板30上设计的零部件过多,考虑到其重量问题,设计四个导向杆402和四个直线轴承,当升降板30通过两个滑条301于立板400上滑动时,四个导向杆402起到限位作用,保证升降板30的滑动平稳,四个直线轴承则减少升降板30滑动时产生的摩擦力,保证升降板30滑动顺畅,进而有利于提升中药的抓取效率。
45.一种混合型中药自动精量抓取装置的使用方法,包括以下步骤:s1:柜子的开启:通过控制器2启动电动推杆510,从而使其输出端向靠近中药柜的一端伸出,由于拉块511与其输出端固定连接,因而带动拉块511向靠近中药柜的一端伸出,限位板512起到限位作用,保证拉块511伸缩平稳,当拉块511向靠近中药柜的一端伸出时,其底部的钩板50会与柜子上把手触碰,由于钩板50与挡块513铰接,因而钩板50会朝着远离挡块513的一端旋转,此时两个伸缩弹簧515受到钩板50旋转时产生的抵触力自动收缩,从而使得钩板50由竖直状态转变为倾斜状态并对把手进行避让,即进入把手的内圈,进入把手内圈后,钩板50与把手的抵触力消失,两个伸缩弹簧515复位,从而带动钩板50复位,即由倾斜状态转变为竖直状态,然后再通过控制器2带动电动推杆510的输出端收缩,利用钩板50与把手内圈的抵触力将柜子从中药柜拉出,需要说明的是,此时产生的抵触力,是由于钩板50拉动把手时,挡块513对钩板50进行遮挡给予的。
46.s2:中药的抓取:柜子从中药柜拉出后,正好位于推送组件60的下方,此时,通控制器2启动长轴气缸600,从而使其输出端向靠近柜子内部的一端伸出,由于推板601与其输出端固定连接,因而带动推板601向靠近柜子内部的一端伸出,两个限位杆602起到限位作用,保证推板601推送平稳,当推板601向靠近柜子内部的一端伸出时,由于两个抓铲62均与推板601滑动连接,因而带动两个抓铲62伸入柜子的内部,然后通过控制器2启动步进电机611,从而带动其输出端上的第二齿轮610旋转,由于两个第二齿条612分别与两个抓铲62的顶部固定连接,每个抓铲62均与推板601滑动连接,又因为两个第二齿条612均与第二齿轮610啮合连接,进而带动两个抓铲62相互靠近直至贴合,将中药抓取至两个抓铲62的内部。
47.s3:中药量的精确控制:中药被抓取至抓铲62的内部后,称重传感器622进行称重,当检测到中药重量不满足抓取量时,称重传感器622将此信号发送给控制器2,从而通过控制器2启动微型电动推杆621,因而通过其输出端带动挡板620于出料口内向远离抓铲62的一端伸出,进而使得出料口缓慢开启,在此过程中,由于抓铲62的内侧底部为斜角结构,因而使得中药从抓铲62的内部由出料口向外滑落,当检测到中药剩余量满足抓取量时,通过控制器2带动微型电动推杆621输出端收缩,从而带动挡板620复位,将出料口关闭,停止中药继续滑出,相较于现有技术,一方面,挖铲的内侧底部的倾斜角度设计较小,因此,出料口在开启时,位于其内部的中药的滑落速度较慢,另一方面,由于挖铲的结构包裹性更强,中药只能从出料口由内往外滑
落,因而通过控制中药于出料口处的滑出速度,即可控制器2中药整体的滑落速度,进而使得中药的抓取量可精确控制,不会因中药滑出过多而产生较大误差。
48.s4:柜子的关闭:中药抓取完毕,通过控制器2启动电动推杆510,从而使其输出端向靠近柜子的一端伸出,进而利用挡块513将其推回至中药柜的内部,然后再通传动组件31带动钩板50上升与药柜把手内圈脱离。
49.s5:不同位置的中药抓取:由于中药柜内放置的中药各不相同,柜子的位置也各不相同,因而设计驱动组件41,当进行水平方向上的中药抓取时,通过控制器2启动伺服电机410,从而带动其输出端旋转,由于丝杆411与其输出端固定连接,因而带动丝杆411于两个支撑板412之间旋转,又因为丝杆411与滑板40的底部螺纹连接,滑板40与两个导轨42滑动连接,进而带动滑板40及其顶部的抓取机构6于底座1的顶部水平滑动,当抓取机构6滑动到所需抓取的装有那味中药的柜子时,通过控制器2断电伺服电机410停止抓取机构6滑动,伺服电机410配合丝杆411结构,能够使得抓取机构6滑动更加精确,进而保证抓药的精确度,有利于提升抓药效率。
50.进行竖直方向上的中药抓取时,通过控制器2启动驱动电机310,从而通过其输出端带动第一齿轮312旋转,由于第一齿条311通过滑块300与升降板30固定连接,滑块300与立板400滑动连接,又因为第一齿条311与滑块300固定连接,第一齿轮312与第一齿轮312啮合连接,进而电动齿条于立板400上向下滑动,进而带动立板400及其上的抓取机构6向下滑动,直至滑动到所需抓取的装有中药的柜子时停止,由于升降板30上设计的零部件过多,考虑到其重量问题,设计四个导向杆402和四个直线轴承,当升降板30通过两个滑条301于立板400上滑动时,四个导向杆402起到限位作用,保证升降板30的滑动平稳,四个直线轴承则减少升降板30滑动时产生的摩擦力,保证升降板30滑动顺畅,进而有利于提升中药的抓取效率。
51.本发明的工作原理:当进行抓药时,首先通过控制器2启动电动推杆510,从而使其输出端向靠近中药柜的一端伸出,由于拉块511与其输出端固定连接,因而带动拉块511向靠近中药柜的一端伸出,限位板512起到限位作用,保证拉块511伸缩平稳。
52.当拉块511向靠近中药柜的一端伸出时,其底部的钩板50会与柜子上把手触碰,由于钩板50与挡块513铰接,因而钩板50会朝着远离挡块513的一端旋转,此时两个伸缩弹簧515受到钩板50旋转时产生的抵触力自动收缩,从而使得钩板50由竖直状态转变为倾斜状态并对把手进行避让,即进入把手的内圈,进入把手内圈后,钩板50与把手的抵触力消失,两个伸缩弹簧515复位,从而带动钩板50复位,即由倾斜状态转变为竖直状态,然后再通过控制器2带动电动推杆510的输出端收缩,利用钩板50与把手内圈的抵触力将柜子从中药柜拉出,需要说明的是,此时产生的抵触力,是由于钩板50拉动把手时,挡块513对钩板50进行遮挡给予的。
53.当柜子从中药柜拉出后,正好位于推送组件60的下方,此时,通控制器2启动长轴气缸600,从而使其输出端向靠近柜子内部的一端伸出,由于推板601与其输出端固定连接,因而带动推板601向靠近柜子内部的一端伸出,两个限位杆602起到限位作用,保证推板601推送平稳。
54.当推板601向靠近柜子内部的一端伸出时,由于两个抓铲62均与推板601滑动连
接,因而带动两个抓铲62伸入柜子的内部,然后通过控制器2启动步进电机611,从而带动其输出端上的第二齿轮610旋转,由于两个第二齿条612分别与两个抓铲62的顶部固定连接,每个抓铲62均与推板601滑动连接,又因为两个第二齿条612均与第二齿轮610啮合连接,进而带动两个抓铲62相互靠近直至贴合,将中药抓取至两个抓铲62的内部。
55.当中药被抓取至抓铲62的内部后,称重传感器622进行称重,当检测到中药重量不满足抓取量时,称重传感器622将此信号发送给控制器2,从而通过控制器2启动微型电动推杆621,因而通过其输出端带动挡板620于出料口内向远离抓铲62的一端伸出,进而使得出料口缓慢开启,在此过程中,由于抓铲62的内侧底部为斜角结构,因而使得中药从抓铲62的内部由出料口向外滑落,当检测到中药剩余量满足抓取量时,通过控制器2带动微型电动推杆621输出端收缩,从而带动挡板620复位,将出料口关闭,停止中药继续滑出,相较于现有技术,一方面,挖铲的内侧底部的倾斜角度设计较小,因此,出料口在开启时,位于其内部的中药的滑落速度较慢,另一方面,由于挖铲的结构包裹性更强,中药只能从出料口由内往外滑落,因而通过控制中药于出料口处的滑出速度,即可控制器2中药整体的滑落速度,进而使得中药的抓取量可精确控制,不会因中药滑出过多而产生较大误差。
56.当中药抓取完毕,通过控制器2启动电动推杆510,从而使其输出端向靠近柜子的一端伸出,进而利用挡块513将其推回至中药柜的内部。
57.由于中药柜内放置的中药各不相同,柜子的位置也各不相同,因而设计驱动组件41,当进行水平方向上的中药抓取时,通过控制器2启动伺服电机410,从而带动其输出端旋转,由于丝杆411与其输出端固定连接,因而带动丝杆411于两个支撑板412之间旋转,又因为丝杆411与滑板40的底部螺纹连接,滑板40与两个导轨42滑动连接,进而带动滑板40及其顶部的抓取机构6于底座1的顶部水平滑动,当抓取机构6滑动到所需抓取的装有那味中药的柜子时,通过控制器2断电伺服电机410停止抓取机构6滑动,伺服电机410配合丝杆411结构,能够使得抓取机构6滑动更加精确,进而保证抓药的精确度,有利于提升抓药效率。
58.当进行竖直方向上的中药抓取时,通过控制器2启动驱动电机310,从而通过其输出端带动第一齿轮312旋转,由于第一齿条311通过滑块300与升降板30固定连接,滑块300与立板400滑动连接,又因为第一齿条311与滑块300固定连接,第一齿轮312与第一齿轮312啮合连接,进而电动齿条于立板400上向下滑动,进而带动立板400及其上的抓取机构6向下滑动,直至滑动到所需抓取的装有中药的柜子时停止,由于升降板30上设计的零部件过多,考虑到其重量问题,设计四个导向杆402和四个直线轴承,当升降板30通过两个滑条301于立板400上滑动时,四个导向杆402起到限位作用,保证升降板30的滑动平稳,四个直线轴承则减少升降板30滑动时产生的摩擦力,保证升降板30滑动顺畅,进而有利于提升中药的抓取效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1