扫地机器人系统及其控制方法与流程
扫地机器人系统及其控制方法
1.本申请是申请号为201910995820.1、发明名称为《扫地机器人系统及扫地机器人控制方法》专利的分案申请。
技术领域
2.本发明属于日常用品技术领域,涉及一种清扫装置,尤其涉及一种扫地机器人系统及其控制方法。
背景技术:
3.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作。一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能。一般来说,将完成清扫、吸尘、擦地工作的机器人,也统一归为扫地机器人。
4.现有的扫地机器人通常无法获知垃圾的位置,只能很随意地清扫,清扫效率不高,清扫效果欠佳。
5.有鉴于此,如今迫切需要设计一种新的清扫控制方式,以便克服现有清扫控制方式存在的上述缺陷。
技术实现要素:
6.本发明提供一种扫地机器人系统及其控制方法,可识别需要清扫区域的位置,并能计算出清扫路径,提高清扫效率及清扫效果。
7.为解决上述技术问题,根据本发明的一个方面,采用如下技术方案:
8.一种扫地机器人系统,所述扫地机器人系统包括:扫地机器人、图像获取模块、用户终端以及服务器,所述服务器分别连接图像获取模块、用户终端以及各扫地机器人;
9.所述图像获取模块用以获取设定区域的图像,从获取的图像中提取清扫地面的整个清扫区域图像;
10.所述用户终端用以查看所述图像获取模块获取的整个清扫区域图像,获取整个清扫区域在设定坐标系下的坐标范围;所述用户终端同时用以在整个清扫区域图像上指示出需清扫区域,并能生成需清扫区域在设定坐标系下的坐标范围;所述用户终端还用以将获取的整个清扫区域在设定坐标系下的坐标范围以及需清扫区域在设定坐标系下的坐标范围发送至所述服务器;
11.所述扫地机器人在服务器的控制下对设定区域进行清扫;所述扫地机器人包括控制电路、行走机构、清扫机构、通讯单元、避障单元及电源单元;所述控制电路分别连接行走机构、清扫机构、通讯单元、避障单元,电源单元分别为控制电路、行走机构、清扫机构、通讯单元及避障单元提供工作所需的电能;所述清扫机构包括至少两个清扫装置,各清扫装置具有不同的清扫方式;
12.所述服务器包括需清扫区域位置获取模块、扫地机器人位置获取模块、行走方向
确定模块、清扫效果判断模块及清扫方式切换控制模块;
13.所述需清扫区域位置获取模块用以通过所述用户终端的反馈信息获取需清扫区域在整个清扫区域的位置;所述需清扫区域位置获取模块接收所述用户终端发送的整个清扫区域在设定坐标系下的坐标范围以及需清扫区域在设定坐标系下的坐标范围,根据需清扫区域的坐标范围在整个清扫区域的坐标范围得到需要清扫区域在整个清扫区域的相对位置;
14.所述需清扫区域位置获取模块还用以判断是否存在需清扫区域,若存在则获取需清扫区域在整个清扫区域的位置;所述需清扫区域位置获取模块将图像获取模块获取的整个清扫区域图像与设定比对图像进行比对,将整个清扫区域图像分割为若干第一子区域m
ij
,将设定比对图像分割成若干子第二子区域m
ij’,各个第一子区域m
ij
的位置分别与第二子区域m
ij’对应,其中,将图像分为a*b个子区域,a为图像被分割的行数,b为图像被分割的列数,1≤i≤a,1≤j≤b;设定比对图像为设定区域在清洁状态下获取的图像;若m
cd
与m
cd’的相似度低于设定阈值,则判断该子区域不干净,需要清洁,1≤c≤a,1≤d≤b;
15.所述扫地机器人位置获取模块用以获取扫地机器人在整个清扫区域图像中的位置;所述扫地机器人位置获取模块用以实时比对所述图像获取模块提取的整个清扫区域图像,将整个清扫区域图像分割为若干子区域,各子区域具有对应的坐标位置范围,分别比对各子区域相邻时间点的图像,找到相似度低于设定阈值的子区域,将该子区域作为扫地机器人所处的区域;通过获取扫地机器人所在子区域,获得其所在子区域的坐标信息,从而得到扫地机器人在整个清扫区域的相对位置;
16.所述行走方向确定模块用以根据所述需清扫区域位置获取模块获取的需清扫区域以及扫地机器人位置获取模块获取的扫地机器人的位置信息,计算扫地机器人朝向需清扫区域行走的方向数据,以使所述扫地机器人能向需清扫区域进行清扫;
17.所述服务器将所述行走方向确定模块获得的行走方向发送至扫地机器人的控制电路,控制电路控制行走机构行走至对应区域进行清扫;
18.所述清扫效果判断模块用以判断清扫效果,通过比对清扫前后对应被清扫的区域的图像相似度、以及比对清扫后对应区域与设定比对图像相似度,判断需清扫区域位置获取模块获取在经过设定时间后,设定被清扫的区域是否被清扫干净;若经过设定时间后,清扫前后对应被清扫的区域的图像相似度小于设定第一阈值、且清扫后对应区域与设定比对图像相似度大于设定第二阈值,则认为清扫效果不佳;若经过设定时间后,清扫前后对应被清扫的区域的图像相似度大于设定第一阈值、且清扫后对应区域与设定比对图像相似度大于设定第二阈值,则认为有一定清扫效果,但并未彻底清扫干净;若经过设定时间后,清扫前后对应被清扫的区域的图像相似度大于设定第一阈值、且清扫后对应区域与设定比对图像相似度小于设定第二阈值,则认为清扫干净;
19.所述清扫方式切换控制模块用以在所述清扫效果判断模块判断清扫效果不佳或并未彻底清扫干净时,向对应扫地机器人发送切换清扫方式的控制命令。
20.根据本发明的另一个方面,采用如下技术方案:一种扫地机器人系统,所述扫地机器人系统包括:
21.扫地机器人;
22.需清扫区域位置获取模块,用以获取需清扫区域在整个清扫区域的位置;
23.扫地机器人位置获取模块,用以获取扫地机器人在整个清扫区域的位置;以及
24.行走方向确定模块,用以根据所述需清扫区域位置获取模块获取的需清扫区域以及扫地机器人位置获取模块获取的扫地机器人的位置信息,计算扫地机器人朝向需清扫区域行走的方向数据,以使所述扫地机器人能向需清扫区域进行清扫。
25.作为本发明的一种实施方式,所述扫地机器人系统还包括图像获取模块,用以获取设定区域的图像,从获取的图像中提取清扫地面的整个清扫区域图像。
26.作为本发明的一种实施方式,所述扫地机器人系统还包括用户终端以及服务器,服务器分别连接各用户终端;所述需清扫区域位置获取模块、扫地机器人位置获取模块以及行走方向确定模块设置于服务器中;
27.所述用户终端用以查看所述图像获取模块获取的整个清扫区域图像,获取整个清扫区域在设定坐标系下的坐标范围;所述用户终端同时用以在整个清扫区域图像上指示出需清扫区域,并能生成需清扫区域在设定坐标系下的坐标范围;所述用户终端还用以将获取的整个清扫区域在设定坐标系下的坐标范围以及需清扫区域在设定坐标系下的坐标范围发送至所述服务器;
28.所述需清扫区域位置获取模块用以通过所述用户终端的反馈信息获取需清扫区域在整个清扫区域的位置;所述需清扫区域位置获取模块接收所述用户终端发送的整个清扫区域在设定坐标系下的坐标范围以及需清扫区域在设定坐标系下的坐标范围,根据需清扫区域的坐标范围在整个清扫区域的坐标范围得到需要清扫区域在整个清扫区域的相对位置。
29.作为本发明的一种实施方式,所述需清扫区域位置获取模块用以判断是否存在需清扫区域,若存在则获取需清扫区域在整个清扫区域的位置;
30.所述需清扫区域位置获取模块将图像获取模块获取的整个清扫区域图像与设定比对图像进行比对,将整个清扫区域图像分割为若干第一子区域m
ij
,将设定比对图像分割成若干子第二子区域m
ij’,各个第一子区域m
ij
的位置分别与第二子区域m
ij’对应,其中,将图像分为a*b个子区域,a为图像被分割的行数,b为图像被分割的列数,1≤i≤a,1≤j≤b;设定比对图像为设定区域在清洁状态下获取的图像;若m
cd
与m
cd’的相似度低于设定阈值,则判断该子区域不干净,需要清洁,1≤c≤a,1≤d≤b。
31.作为本发明的一种实施方式,所述扫地机器人位置获取模块用以获取扫地机器人在整个清扫区域图像中的位置;所述扫地机器人位置获取模块用以实时比对所述图像获取模块提取的整个清扫区域图像,将整个清扫区域图像分割为若干子区域,各子区域具有对应的坐标位置范围,分别比对各子区域相邻时间点的图像,找到相似度低于设定阈值的子区域,将该子区域作为扫地机器人所处的区域;通过获取扫地机器人所在子区域,获得其所在子区域的坐标信息,从而得到扫地机器人在整个清扫区域的相对位置。
32.作为本发明的一种实施方式,所述扫地机器人在控制模块的控制下对设定区域进行清扫;所述扫地机器人包括控制电路、行走机构、清扫机构、通讯单元、避障单元及电源单元;所述控制电路分别连接行走机构、清扫机构、通讯单元、避障单元,电源单元分别为控制电路、行走机构、清扫机构、通讯单元及避障单元提供工作所需的电能。
33.作为本发明的一种实施方式,所述清扫机构扫地机器人的包括至少两个清扫装置,各清扫装置具有不同的清扫方式;所述扫地机器人系统还包括清扫效果判断模块、清扫
方式切换控制模块;
34.所述清扫效果判断模块用以判断清扫效果,通过比对清扫前后对应被清扫的区域的图像相似度、以及比对清扫后对应区域与设定比对图像相似度,判断需清扫区域位置获取模块获取在经过设定时间后,设定被清扫的区域是否被清扫干净;若经过设定时间后,清扫前后对应被清扫的区域的图像相似度小于设定第一阈值、且清扫后对应区域与设定比对图像相似度大于设定第二阈值,则认为清扫效果不佳;若经过设定时间后,清扫前后对应被清扫的区域的图像相似度大于设定第一阈值、且清扫后对应区域与设定比对图像相似度大于设定第二阈值,则认为有一定清扫效果,但并未彻底清扫干净;若经过设定时间后,清扫前后对应被清扫的区域的图像相似度大于设定第一阈值、且清扫后对应区域与设定比对图像相似度小于设定第二阈值,则认为清扫干净;
35.所述清扫方式切换控制模块用以在所述清扫效果判断模块判断清扫效果不佳或并未彻底清扫干净时,向对应扫地机器人发送切换清扫方式的控制命令。
36.根据本发明的又一个方面,采用如下技术方案:一种扫地机器人控制方法,所述控制方法包括:
37.获取需清扫区域在整个清扫区域的位置;
38.获取扫地机器人在整个清扫区域的位置;以及
39.根据所述需清扫区域位置获取模块获取的需清扫区域以及扫地机器人位置获取模块获取的扫地机器人的位置信息,计算扫地机器人朝向需清扫区域行走的方向数据,以使所述扫地机器人能向需清扫区域进行清扫。
40.根据本发明的又一个方面,采用如下技术方案:一种扫地机器人控制方法,所述控制方法包括:
41.图像获取模块获取设定区域的图像,从获取的图像中提取清扫地面的整个清扫区域图像;
42.用户能通过用户终端查看所述图像获取模块获取的整个清扫区域图像,获取整个清扫区域在设定坐标系下的坐标范围;在整个清扫区域图像上指示出需清扫区域,并能生成需清扫区域在设定坐标系下的坐标范围;用户终端将获取的整个清扫区域在设定坐标系下的坐标范围以及需清扫区域在设定坐标系下的坐标范围发送至所述服务器;
43.需清扫区域位置获取模块获取需清扫区域在整个清扫区域的位置;所述需清扫区域位置获取模块接收所述用户终端发送的整个清扫区域在设定坐标系下的坐标范围以及需清扫区域在设定坐标系下的坐标范围,根据需清扫区域的坐标范围在整个清扫区域的坐标范围得到需要清扫区域在整个清扫区域的相对位置;
44.需清扫区域位置获取模块将图像获取模块获取的整个清扫区域图像与设定比对图像进行比对,将整个清扫区域图像分割为若干第一子区域mij,将设定比对图像分割成若干子第二子区域mij’,各个第一子区域mij的位置分别与第二子区域mij’对应,其中,将图像分为a*b个子区域,a为图像被分割的行数,b为图像被分割的列数,1≤i≤a,1≤j≤b;设定比对图像为设定区域在清洁状态下获取的图像;若mcd与mcd’的相似度低于设定阈值,则判断该子区域不干净,需要清洁,1≤c≤a,1≤d≤b;
45.扫地机器人位置获取模块获取扫地机器人在整个清扫区域图像中的位置;所述扫地机器人位置获取模块实时比对所述图像获取模块提取的整个清扫区域图像,将整个清扫
区域图像分割为若干子区域,各子区域具有对应的坐标位置范围,分别比对各子区域相邻时间点的图像,找到相似度低于设定阈值的子区域,将该子区域作为扫地机器人所处的区域;通过获取扫地机器人所在子区域,获得其所在子区域的坐标信息,从而得到扫地机器人在整个清扫区域的相对位置;
46.行走方向确定模块根据所述需清扫区域位置获取模块获取的需清扫区域以及扫地机器人位置获取模块获取的扫地机器人的位置信息,计算扫地机器人朝向需清扫区域行走的方向数据,以使所述扫地机器人能向需清扫区域进行清扫;
47.服务器将所述行走方向确定模块获得的行走方向发送至扫地机器人的控制电路,控制电路控制行走机构行走至对应区域进行清扫;
48.清扫效果判断模块判断清扫效果,通过比对清扫前后对应被清扫的区域的图像相似度、以及比对清扫后对应区域与设定比对图像相似度,判断需清扫区域位置获取模块获取在经过设定时间后,设定被清扫的区域是否被清扫干净;若经过设定时间后,清扫前后对应被清扫的区域的图像相似度小于设定第一阈值、且清扫后对应区域与设定比对图像相似度大于设定第二阈值,则认为清扫效果不佳;若经过设定时间后,清扫前后对应被清扫的区域的图像相似度大于设定第一阈值、且清扫后对应区域与设定比对图像相似度大于设定第二阈值,则认为有一定清扫效果,但并未彻底清扫干净;若经过设定时间后,清扫前后对应被清扫的区域的图像相似度大于设定第一阈值、且清扫后对应区域与设定比对图像相似度小于设定第二阈值,则认为清扫干净;
49.清扫方式切换控制模块在所述清扫效果判断模块判断清扫效果不佳或并未彻底清扫干净时,向对应扫地机器人发送切换清扫方式的控制命令。
50.本发明的有益效果在于:本发明提出的扫地机器人系统及其控制方法,可识别需要清扫区域的位置,并能计算出清扫路径,提高清扫效率及清扫效果。
附图说明
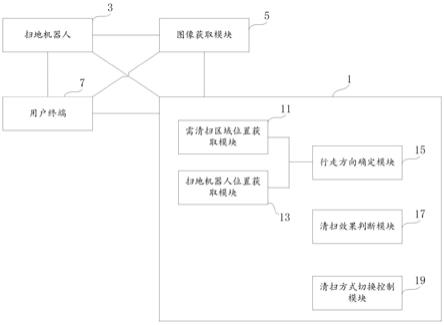
51.图1为本发明一实施例中扫地机器人系统的组成示意图。
52.图2为本发明一实施例中图像获取模块获取的整个清扫区域图像的示意图。
53.图3为本发明一实施例中用户终端选择需清扫区域的示意图。
54.图4为本发明一实施例中需清扫区域位置获取模块比对各个子区域的示意图。
55.图5为本发明一实施例中扫地机器人位置获取模块获取扫地机器人位置的示意图。
具体实施方式
56.下面结合附图详细说明本发明的优选实施例。
57.为了进一步理解本发明,下面结合实施例对本发明优选实施方案进行描述,但是应当理解,这些描述只是为进一步说明本发明的特征和优点,而不是对本发明权利要求的限制。
58.该部分的描述只针对几个典型的实施例,本发明并不仅局限于实施例描述的范围。相同或相近的现有技术手段与实施例中的一些技术特征进行相互替换也在本发明描述和保护的范围内。
59.本发明揭示了一种扫地机器人系统,所述扫地机器人系统包括扫地机器人、需清扫区域位置获取模块、扫地机器人位置获取模块以及行走方向确定模块。需清扫区域位置获取模块用以获取需清扫区域在整个清扫区域的位置;扫地机器人位置获取模块用以获取扫地机器人在整个清扫区域的位置;行走方向确定模块用以根据所述需清扫区域位置获取模块获取的需清扫区域以及扫地机器人位置获取模块获取的扫地机器人的位置信息,计算扫地机器人朝向需清扫区域行走的方向数据,以使所述扫地机器人能向需清扫区域进行清扫。
60.在本发明的一实施例中,所述扫地机器人系统还可以包括图像获取模块,用以获取设定区域的图像,从获取的图像中提取清扫地面的整个清扫区域图像。图像获取模块可以为摄像头,摄像头可以安装在需清扫区域的天花板上,也可以设置于其他区域。优选地,摄像头尽量放在清扫区域的中心位置;在摄像头不在中心位置时,可通过图像倾斜纠正算法将图像纠正,而后便于比对识别;当然,也可以不进行图像倾斜纠正,比对图片时都是倾斜一定角度的图像。
61.在本发明的一实施例中,所述扫地机器人系统还可以包括用户终端以及服务器,服务器分别连接各用户终端;所述需清扫区域位置获取模块、扫地机器人位置获取模块以及行走方向确定模块设置于服务器中。
62.图1为本发明一实施例中扫地机器人系统的组成示意图;请参阅图1,在本发明的一实施例中,所述扫地机器人系统包括:扫地机器人3、图像获取模块5、用户终端7以及服务器1,所述服务器1分别连接图像获取模块5、用户终端7以及扫地机器人3。此外,用户终端7还可以分别连接扫地机器人3及图像获取模块5;当然,扫地机器人3也可以连接图像获取模块5。在本发明的另一实施例中,需清扫区域位置获取模块、扫地机器人位置获取模块以及行走方向确定模块也可以设置于扫地机器人3中,通过扫地机器人3的微处理器实现运算。
63.图2为本发明一实施例中图像获取模块获取的整个清扫区域图像的示意图;请参阅图2,在本发明的一实施例中,所述用户终端7用以查看所述图像获取模块5获取的整个清扫区域图像51,获取整个清扫区域51在设定坐标系下的坐标范围。
64.图3为本发明一实施例中用户终端选择需清扫区域的示意图;请参阅图3,在本发明的一实施例中,所述用户终端7同时用以在整个清扫区域图像上指示出需清扫区域71(出需清扫区域71内有垃圾9),如果用户发现整个清扫区域图像中有部分区域存在垃圾或污渍需要清扫,用户能通过用户终端7标识出需清扫区域。例如用户终端7为设有触摸屏的手机,通过手机屏幕看到整个清扫区域图像51,在该用户触摸设定区域后(手机可以获取触摸区域,从而获取触摸区域在整个手机触摸屏上的相对位置关系),用户终端7能生成需清扫区域51在设定坐标系下的坐标范围。所述用户终端7还用以将获取的整个清扫区域51在设定坐标系下的坐标范围以及需清扫区域71在设定坐标系下的坐标范围发送至所述服务器1。
65.所述扫地机器人3在服务器1的控制下对设定区域进行清扫。扫地机器人3的组成是本领域的惯用技术,这里不做赘述。通常扫地机器人3包括控制电路、行走机构、清扫机构、通讯单元、避障单元及电源单元;所述控制电路分别连接行走机构、清扫机构、通讯单元、避障单元,电源单元分别为控制电路、行走机构、清扫机构、通讯单元及避障单元提供工作所需的电能。在本发明的一实施例中,所述清扫机构包括至少两个清扫装置,各清扫装置具有不同的清扫方式。如,第一清扫装置用来清扫纸屑等非黏性垃圾,第二清扫装置用来清
扫有一定黏性的黏性垃圾(如水渍、污点等);对于不同的垃圾,通常需要使用不同的清扫装置。在一实施例中,通常默认的是使用第一清扫装置;在服务器判断清扫效果不佳时,切换为第二清扫装置。
66.所述服务器1包括需清扫区域位置获取模块11、扫地机器人位置获取模块13、行走方向确定模块15、清扫效果判断模块17及清扫方式切换控制模块19。
67.在本发明的一实施例中,所述需清扫区域位置获取模块11用以通过所述用户终端7的反馈信息获取需清扫区域71在整个清扫区域51的位置(如图3所述);所述需清扫区域位置获取模块11接收所述用户终端7发送的整个清扫区域51在设定坐标系下的坐标范围以及需清扫区域71在设定坐标系下的坐标范围,根据需清扫区域71的坐标范围在整个清扫区域51的坐标范围得到需要清扫区域71在整个清扫区域51的相对位置。
68.在本发明的一实施例中,可不通过用户终端7获取需清扫区域的位置,而是由需清扫区域位置获取模块11根据图像获取模块5获取的图像与设定图像(对应区域处于清洁状态)进行比对,得到需清扫区域的位置。
69.所述需清扫区域位置获取模块11用以判断是否存在需清扫区域,若存在则获取需清扫区域在整个清扫区域的位置;所述需清扫区域位置获取模块将图像获取模块5获取的整个清扫区域图像与设定比对图像进行比对(如图4所示),将整个清扫区域图像分割为若干第一子区域m
ij
,将设定比对图像分割成若干子第二子区域m
ij’,各个第一子区域m
ij
的位置分别与第二子区域m
ij’对应,其中,将图像分为a*b个子区域,a为图像被分割的行数,b为图像被分割的列数,1≤i≤a,1≤j≤b;设定比对图像为设定区域在清洁状态下获取的图像;若m
cd
与m
cd’的相似度低于设定阈值,则判断该子区域不干净,需要清洁,1≤c≤a,1≤d≤b。为了从图像获取模块5获取的整个清扫区域图像中剔除扫地机器人的图像,可以比对在扫地机器人移动较远距离(移动距离超出扫地机器人直径或最长)前后,若m
cd
与m
cd’的相似度均低于设定阈值,则判断该子区域不干净,需要清洁,1≤c≤a,1≤d≤b。
70.所述扫地机器人位置获取模块13用以获取扫地机器人3在整个清扫区域图像中的位置;所述扫地机器人位置获取模块13用以实时比对所述图像获取模块5提取的整个清扫区域图像(如图2所示),将整个清扫区域图像分割为若干子区域(如图4所示),各子区域具有对应的坐标位置范围,分别比对各子区域相邻时间点的图像,找到相似度低于设定阈值的子区域,将该子区域作为扫地机器人所处的区域;通过获取扫地机器人所在子区域,获得其所在子区域的坐标信息,从而得到扫地机器人在整个清扫区域的相对位置。
71.所述行走方向确定模块15用以根据所述需清扫区域位置获取模块获取的需清扫区域以及扫地机器人位置获取模块获取的扫地机器人的位置信息,计算扫地机器人朝向需清扫区域行走的方向数据,以使所述扫地机器人能向需清扫区域进行清扫。若需清扫区域位置与扫地机器人的位置相同,若干扫地机器人3在该区域已经清扫设定时间,则认为扫地机器人3不需要清扫该区域。
72.所述服务器1将所述行走方向确定模块15获得的行走方向发送至扫地机器人3的控制电路,控制电路控制行走机构行走至对应区域进行清扫。
73.所述清扫效果判断模块17用以判断清扫效果,通过比对清扫前后对应被清扫的区域的图像相似度、以及比对清扫后对应区域与设定比对图像相似度(均在扫地机器人离开此块清扫区域后比对),判断需清扫区域位置获取模块获取在经过设定时间后,设定被清扫
的区域是否被清扫干净。若经过设定时间后,清扫前后对应被清扫的区域的图像相似度小于设定第一阈值、且清扫后对应区域与设定比对图像相似度大于设定第二阈值,则认为清扫效果不佳。若经过设定时间后,清扫前后对应被清扫的区域的图像相似度大于设定第一阈值、且清扫后对应区域与设定比对图像相似度大于设定第二阈值,则认为有一定清扫效果,但并未彻底清扫干净。若经过设定时间后,清扫前后对应被清扫的区域的图像相似度大于设定第一阈值、且清扫后对应区域与设定比对图像相似度小于设定第二阈值,则认为清扫干净。
74.所述清扫方式切换控制模块19用以在所述清扫效果判断模块判断清扫效果不佳或并未彻底清扫干净时,向对应扫地机器人发送切换清扫方式的控制命令。扫地机器人切换清扫装置,继续清扫该区域。
75.本发明还揭示一种扫地机器人控制方法,所述控制方法包括:
76.获取需清扫区域在整个清扫区域的位置;获取扫地机器人在整个清扫区域的位置;
77.根据所述需清扫区域位置获取模块获取的需清扫区域以及扫地机器人位置获取模块获取的扫地机器人的位置信息,计算扫地机器人朝向需清扫区域行走的方向数据,以使所述扫地机器人能向需清扫区域进行清扫。
78.在本发明的一实施例中,所述控制方法具体包括:
79.【步骤s1】图像获取模块获取设定区域的图像,从获取的图像中提取清扫地面的整个清扫区域图像;
80.【步骤s2】需清扫区域位置获取模块获取需清扫区域在整个清扫区域的位置;
81.在本发明的一实施例中,需清扫区域位置获取模块将图像获取模块获取的整个清扫区域图像与设定比对图像进行比对,将整个清扫区域图像分割为若干第一子区域mij,将设定比对图像分割成若干子第二子区域mij’,各个第一子区域mij的位置分别与第二子区域mij’对应,其中,将图像分为a*b个子区域,a为图像被分割的行数,b为图像被分割的列数,1≤i≤a,1≤j≤b;设定比对图像为设定区域在清洁状态下获取的图像;若mcd与mcd’的相似度低于设定阈值,则判断该子区域不干净,需要清洁,1≤c≤a,1≤d≤b;
82.在本发明的另一实施例中,用户能通过用户终端查看所述图像获取模块获取的整个清扫区域图像,获取整个清扫区域在设定坐标系下的坐标范围;在整个清扫区域图像上指示出需清扫区域,并能生成需清扫区域在设定坐标系下的坐标范围;用户终端将获取的整个清扫区域在设定坐标系下的坐标范围以及需清扫区域在设定坐标系下的坐标范围发送至所述服务器。
83.所述需清扫区域位置获取模块接收所述用户终端发送的整个清扫区域在设定坐标系下的坐标范围以及需清扫区域在设定坐标系下的坐标范围,根据需清扫区域的坐标范围在整个清扫区域的坐标范围得到需要清扫区域在整个清扫区域的相对位置。
84.【步骤s3】扫地机器人位置获取模块获取扫地机器人在整个清扫区域图像中的位置;所述扫地机器人位置获取模块实时比对所述图像获取模块提取的整个清扫区域图像,将整个清扫区域图像分割为若干子区域,各子区域具有对应的坐标位置范围,分别比对各子区域相邻时间点的图像,找到相似度低于设定阈值的子区域,将该子区域作为扫地机器人所处的区域;通过获取扫地机器人所在子区域,获得其所在子区域的坐标信息,从而得到
扫地机器人在整个清扫区域的相对位置;
85.【步骤s4】行走方向确定模块根据所述需清扫区域位置获取模块获取的需清扫区域以及扫地机器人位置获取模块获取的扫地机器人的位置信息,计算扫地机器人朝向需清扫区域行走的方向数据,以使所述扫地机器人能向需清扫区域进行清扫;
86.【步骤s5】服务器将所述行走方向确定模块获得的行走方向发送至扫地机器人的控制电路,控制电路控制行走机构行走至对应区域进行清扫;
87.【步骤s6】清扫效果判断模块判断清扫效果,通过比对清扫前后对应被清扫的区域的图像相似度、以及比对清扫后对应区域与设定比对图像相似度,判断需清扫区域位置获取模块获取在经过设定时间后,设定被清扫的区域是否被清扫干净;若经过设定时间后,清扫前后对应被清扫的区域的图像相似度小于设定第一阈值、且清扫后对应区域与设定比对图像相似度大于设定第二阈值,则认为清扫效果不佳;若经过设定时间后,清扫前后对应被清扫的区域的图像相似度大于设定第一阈值、且清扫后对应区域与设定比对图像相似度大于设定第二阈值,则认为有一定清扫效果,但并未彻底清扫干净;若经过设定时间后,清扫前后对应被清扫的区域的图像相似度大于设定第一阈值、且清扫后对应区域与设定比对图像相似度小于设定第二阈值,则认为清扫干净;
88.【步骤s7】清扫方式切换控制模块在所述清扫效果判断模块判断清扫效果不佳或并未彻底清扫干净时,向对应扫地机器人发送切换清扫方式的控制命令。
89.综上所述,本发明提出的扫地机器人系统及其控制方法,可识别需要清扫区域的位置,并能计算出清扫路径,提高清扫效率及清扫效果。
90.这里本发明的描述和应用是说明性的,并非想将本发明的范围限制在上述实施例中。这里所披露的实施例的变形和改变是可能的,对于那些本领域的普通技术人员来说实施例的替换和等效的各种部件是公知的。本领域技术人员应该清楚的是,在不脱离本发明的精神或本质特征的情况下,本发明可以以其它形式、结构、布置、比例,以及用其它组件、材料和部件来实现。在不脱离本发明范围和精神的情况下,可以对这里所披露的实施例进行其它变形和改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1