清除蓝藻机器人的制作方法
清除蓝藻机器人
[0001]
本申请是申请日为2019年08月05日,名称为“一种清除蓝藻自动机器人船扫地机器人收集器”、申请号为201910715636.7的发明专利申请的分案。
技术领域
[0002]
本发明属于蓝藻清除机器人技术领域,特别涉及平衡性能好的清除蓝藻机器人船扫地机器人收集器。
背景技术:
[0003]
在一些营养丰富的水体中,有些蓝藻常于夏季大量繁殖,并在水面形成一层蓝绿色而有腥臭味的浮沫,称为“水华”,大规模的蓝藻爆发,被称为“绿潮”,绿潮引起水质恶化,严重时耗尽水中氧气而造成鱼类的死亡。更为严重的是,蓝藻中有些种类(如微囊藻)还会产生微囊藻毒素,大约50%的绿潮中含有大量mcs。mcs除了直接对鱼类、人畜产生毒害之外,也是肝癌的重要诱因,因此,对蓝藻的治理非常重要,但是,现有设备在清除蓝藻时,均需要很多人力,清理效率较低,为此,本发明提出平衡性能好的清除蓝藻机器人船扫地机器人收集器。
技术实现要素:
[0004]
为了解决现有技术存在的问题,本发明提供了清除蓝藻机器人,该清除蓝藻机器人设计合理,稳定性高,清除效率高。
[0005]
为了实现上述目的,本发明是通过如下的技术方案来实现:清除蓝藻机器人,包括船体一、船体二、连接板和收集框,所述连接板固定安装在船体一和船体二之间,所述船体一和船体二内均开设有空腔,所述空腔一侧的内侧壁上均固定安装有伺服电机,所述伺服电机的输出轴上固定安装有传动齿轮,所述空腔顶部的内侧壁上通过螺栓安装有支架一,所述支架一的底部固定安装有轴承一,所述船体一和船体二的一端与轴承一对应的位置处均固定安装有套管,所述套管的一端固定安装有传动箱,所述传动箱内设置有斜齿轮一和斜齿轮二,转动杆一的一端穿过轴承一并与轴承一固定连接,所述转动杆一的一端固定安装有齿轮一,所述齿轮一与传动齿轮相啮合,所述转动杆一的另一端穿过套管与斜齿轮二固定连接,所述传动箱的底部开设有通孔,所述通孔内固定安装有轴承二,叶片的顶部固定安装有转动杆二,所述转动杆二的一端穿过轴承二与斜齿轮一固定连接,所述空腔底部的内侧壁上通过螺栓安装有支架二,所述支架二的顶部固定安装有轴承三,螺旋桨的一端固定连接有转动杆三,所述空腔一侧的内侧壁上与轴承三对应的位置处开设有通孔,所述通孔内固定安装有轴承四,所述转动杆三的一端穿过轴承四和轴承三并与轴承三固定连接,所述转动杆三处于空腔内的一端固定安装有齿轮二,所述齿轮二与传动齿轮相啮合,所述空腔底部的内侧壁上固定安装有蓄电池,所述空腔底部的内侧壁上通过螺栓安装有气泵,所述气泵上设置有进气管和出气管,所述船体一和船体二的顶部均固定连接有弯管一和弯管二,所述进气管与弯管二连接,所述船体一和船体二另一端的底部固定安装有保护框,所
述保护框内固定安装有弹性橡胶囊,所述出气管的一端与弹性橡胶囊连通,所述空腔底部的内侧壁上固定连接有排气管,所述排气管上安装有电动阀门,所述排气管的一端与弹性橡胶囊连通,所述排气管的另一端与弯管一固定连接,所述船体一和船体二的顶部均固定安装有太阳能板,所述收集框上安装有过滤网,所述收集框的一端固定安装有固定板,所述固定板的底部固定安装有固定杆,所述连接板一端的顶部开设有固定槽,所述固定槽一侧的内侧壁上固定安装有压力传感器,所述固定杆处于固定槽内,所述船体一与船体二之间固定安装有蓝藻通道,所述收集框的一端与蓝藻通道接触,所述连接板的顶部固定安装有控制箱,所述控制箱内安装有处理器和定位器,所述控制箱的前侧安装有操作按键和显示屏。
[0006]
作为本发明的一种优选方式,所述蓄电池通过供电电路分别与处理器、定位器、压力传感器、操作按键、显示屏、气泵、伺服电机和电动阀门电性连接。
[0007]
作为本发明的一种优选方式,所述蓝藻通道的位置与收集框相对应。
[0008]
作为本发明的一种优选方式,所述固定槽、固定杆和压力传感器的数量均为2个。
[0009]
作为本发明的一种优选方式,所述处理器通过监测电路分别与定位器、压力传感器和操作按键电性连接。
[0010]
作为本发明的一种优选方式,所述处理器通过指令电路分别与显示屏、气泵、伺服电机和电动阀门电性连接。
[0011]
作为本发明的一种优选方式,所述太阳能板通过充电电路与蓄电池电性连接。
[0012]
作为本发明的一种优选方式,所述太阳能板内设置有太阳能转换装置。
[0013]
作为本发明的一种优选方式,所述套管与转动杆一之间填充有润滑油。
[0014]
作为本发明的一种优选方式,所述传动齿轮与齿轮一和齿轮二之间均涂有润滑油,所述斜齿轮一与斜齿轮二之间涂有润滑油。
[0015]
本发明的有益效果:本发明的清除蓝藻机器人,包括船体一、船体二、连接板、收集框、处理器、压力传感器、操作按键、显示屏、气泵、伺服电机、电动阀门、传动齿轮、支架一、轴承一、套管、传动箱、斜齿轮一、斜齿轮二、转动杆一、齿轮一、叶片、转动杆二、轴承二、支架二、轴承三、螺旋桨、转动杆三、齿轮二、进气管、出气管、弯管一、弯管二、保护框、弹性像胶囊、排气管、控制箱、太阳能板、过滤网、固定板、固定槽、固定杆、蓝藻通道、蓄电池、空腔和定位器。
[0016]
1、此清除蓝藻机器人收集器能够自动进行蓝藻清除,并且在清除蓝藻的同时,能够自动对前方的蓝藻进行聚集,从而能够有效的提高蓝藻清除的效率。
[0017]
2、此平清除蓝藻机器人的固定槽与固定杆之间安装了压力传感器,当收集框内收集的蓝藻逐渐增加时,固定槽与固定杆之间的压力也逐渐增加,此时处理器控制气泵往弹性像胶囊内充气,从而使船体一和船体二后半部分浮力增加,使整体能够保持良好的平衡,安全性高。
[0018]
3、此清除蓝藻机器人使用方便,蓝藻收集足够多时,能够自动返航,然后只需将收集框取下,将内部蓝藻去除即可继续使用,方便快捷。
附图说明
[0019]
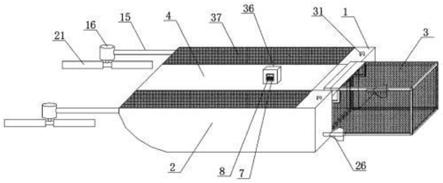
图1为清除蓝藻机器人的结构示意图;
图2为清除蓝藻机器人的剖面示意图;图3为清除蓝藻机器人的船体一剖面示意图;图4为清除蓝藻机器人的叶片安装示意图;图5为清除蓝藻机器人的船体一与船体二连接示意图;图6为清除蓝藻机器人的收集框结构示意图;图7为清除蓝藻机器人的收集框与连接板示意图;图8为清除蓝藻机器人的电路连接示意图;图中:1-船体一、2-船体二、3-连接板、4-收集框、5-处理器、6-压力传感器、7-操作按键、8-显示屏、9-气泵、10-伺服电机、11-电动阀门、12-传动齿轮、13-支架一、14-轴承一、15-套管、16-传动箱、17-斜齿轮一、18-斜齿轮二、19-转动杆一、20-齿轮一、21-叶片、22-转动杆二、23-轴承二、24-支架二、25-轴承三、26-螺旋桨、27-转动杆三、28-齿轮二、29-进气管、30-出气管、31-弯管一、32-弯管二、33-保护框、34-弹性像胶囊、35-排气管、36-控制箱、37-太阳能板、38-过滤网、39-固定板、40-固定槽、41-固定杆、42-蓝藻通道、43-蓄电池、44-空腔、45-定位器。
具体实施方式
[0020]
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本发明。
[0021]
请参阅图1至图8,本发明提供一种技术方案:清除蓝藻机器人,包括船体一1、船体二2、连接板3和收集框4,所述连接板3固定安装在船体一1和船体二2之间,所述船体一1和船体二2内均开设有空腔44,所述空腔44一侧的内侧壁上均固定安装有伺服电机10,所述伺服电机10的输出轴上固定安装有传动齿轮12,所述空腔44顶部的内侧壁上通过螺栓安装有支架一13,所述支架一13的底部固定安装有轴承一14,所述船体一1和船体二2的一端与轴承一14对应的位置处均固定安装有套管15,所述套管15的一端固定安装有传动箱16,所述传动箱16内设置有斜齿轮一17和斜齿轮二18,转动杆一19的一端穿过轴承一14并与轴承一14固定连接,所述转动杆一19的一端固定安装有齿轮一20,所述齿轮一20与传动齿轮12相啮合,所述转动杆一19的另一端穿过套管15与斜齿轮二18固定连接,所述传动箱16的底部开设有通孔,所述通孔内固定安装有轴承二23,叶片21的顶部固定安装有转动杆二22,所述转动杆二22的一端穿过轴承二23与斜齿轮一17固定连接,所述空腔44底部的内侧壁上通过螺栓安装有支架二24,所述支架二24的顶部固定安装有轴承三25,螺旋桨26的一端固定连接有转动杆三27,所述空腔44一侧的内侧壁上与轴承三25对应的位置处开设有通孔,所述通孔内固定安装有轴承四,所述转动杆三27的一端穿过轴承四和轴承三25并与轴承三25固定连接,所述转动杆三27处于空腔44内的一端固定安装有齿轮二28,所述齿轮二28与传动齿轮12相啮合,所述空腔44底部的内侧壁上固定安装有蓄电池43,所述空腔44底部的内侧壁上通过螺栓安装有气泵9,所述气泵9上设置有进气管29和出气管30,所述船体一1和船体二2的顶部均固定连接有弯管一31和弯管二32,所述进气管29与弯管二32连接,所述船体一1和船体二2另一端的底部固定安装有保护框33,所述保护框33内固定安装有弹性橡胶囊34,所述出气管30的一端与弹性橡胶囊34连通,所述空腔44底部的内侧壁上固定连接有排气管35,所述排气管35上安装有电动阀门11,所述排气管35的一端与弹性橡胶囊34连通,所
述排气管35的另一端与弯管一31固定连接,所述船体一1和船体二2的顶部均固定安装有太阳能板37,所述收集框4上安装有过滤网38,所述收集框4的一端固定安装有固定板39,所述固定板39的底部固定安装有固定杆41,所述连接板3一端的顶部开设有固定槽40,所述固定槽40一侧的内侧壁上固定安装有压力传感器6,所述固定杆41处于固定槽40内,所述船体一1与船体二2之间固定安装有蓝藻通道42,所述收集框4的一端与蓝藻通道42接触,所述连接板3的顶部固定安装有控制箱36,所述控制箱36内安装有处理器5和定位器45,所述控制箱36的前侧安装有操作按键7和显示屏8。
[0022]
作为本发明的一种优选方式,所述蓄电池43通过供电电路分别与处理器5、定位器45、压力传感器6、操作按键7、显示屏8、气泵9、伺服电机10和电动阀门11电性连接。
[0023]
作为本发明的一种优选方式,所述蓝藻通道42的位置与收集框4相对应。
[0024]
作为本发明的一种优选方式,所述固定槽40、固定杆41和压力传感器6的数量均为2个。
[0025]
作为本发明的一种优选方式,所述处理器5通过监测电路分别与定位器45、压力传感器6和操作按键7电性连接。
[0026]
作为本发明的一种优选方式,所述处理器5通过指令电路分别与显示屏8、气泵9、伺服电机10和电动阀门11电性连接。
[0027]
作为本发明的一种优选方式,所述太阳能板37通过充电电路与蓄电池43电性连接。
[0028]
作为本发明的一种优选方式,所述太阳能板37内设置有太阳能转换装置。
[0029]
作为本发明的一种优选方式,所述套管15与转动杆一19之间填充有润滑油。
[0030]
作为本发明的一种优选方式,所述传动齿轮12与齿轮一20和齿轮二28之间均涂有润滑油,所述斜齿轮一17与斜齿轮二18之间涂有润滑油。
[0031]
作为本发明的一种优选方式,所述固定槽40与固定杆41之间安装了压力传感器6,压力传感器6能够检测到固定槽40与固定杆41之间的压力,当收集框4内收集的蓝藻逐渐增加时,固定槽40与固定杆41之间的压力也逐渐增加,此时处理器5控制气泵9往弹性像胶囊34内充气,从而使船体一1和船体二2后半部分浮力增加,使整体能够保持良好的平衡,安全性高。
[0032]
作为本发明的一种优选方式,所述固定槽40与固定杆41之间的压力达到一定值时,由处理器5控制进行返航,返航后,只需将固定杆41从固定槽40内取出,就能够收集框4取下,将内部蓝藻去除即可继续使用,方便快捷。
[0033]
作为本发明的一种优选方式,所述叶片21在清除蓝藻的同时,能够自动对前方的蓝藻进行聚集,从而能够有效的提高蓝藻清除的效率。
[0034]
工作原理:在使用此清除蓝藻机器人时,将清除蓝藻机器人放入需要的水体中,通过操作按键7启动,通过显示屏8查看定位器45的定位信息,通过操作按键7选择起点和蓝藻清理路线,然后输入开始执行命令,处理器5控制船体一1和船体二2内的伺服电机10工作,伺服电机10通过传动齿轮12带动齿轮一20和齿轮二28转动,齿轮一20通过转动杆一19带动斜齿轮二18转动,斜齿轮二18带动斜齿轮一17转动,斜齿轮一17通过转动杆二22带动叶片21转动,叶片21对水面上的蓝藻进行聚集,使更多的蓝藻进入船体一1和船体二2之间的蓝藻通道42,然后进入收集框4,同时,齿轮二28通过转动杆三27带动螺旋桨26转动推动整体
前进,固定槽40与固定杆41之间安装了压力传感器6,压力传感器6能够检测到固定槽40与固定杆41之间的压力,当收集框4内收集的蓝藻逐渐增加时,固定槽40与固定杆41之间的压力也逐渐增加,此时处理器5控制气泵9往弹性像胶囊34内充气,从而使船体一1和船体二2后半部分浮力增加,使整体能够保持良好的平衡,安全性高,处理器5通过控制船体一1和船体二2内的伺服电机10的转速,来控制整体的前进方向,配合定位器45进行特定路线行走,当固定槽40与固定杆41之间的压力达到一定值时,由处理器5控制进行返航,返航后,只需将固定杆41从固定槽40内取出,就能够收集框4取下,将内部蓝藻去除即可继续使用,方便快捷,此平衡性能好的清除蓝藻机器人船扫地机器人收集器能够自动进行蓝藻清除,并且在清除蓝藻的同时,能够自动对前方的蓝藻进行聚集,从而能够有效的提高蓝藻清除的效率。
[0035]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点,对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0036]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1