一种空心高墩施工用外爬内吊式施工装置及其使用方法与流程
1.本发明涉及桥梁空心高墩施工技术领域,具体涉及一种空心高墩施工用外爬内吊式施工装置及其使用方法。
背景技术:
2.在山区及峡谷公路桥梁中,桥梁跨径较大,出现了越来越多的百米薄壁空心高墩。在薄壁空心高墩施工过程中,广泛采用液压爬模施工工艺。液压爬模系统具有自动导向、液压升降、自动复位的功能,有利于满足薄壁空心高墩中线垂直、大面平整、轮廓顺直的质量和精度要求。除安装和拆除阶段外,整个爬升过程均不需要其他起吊设备,通过自身液压油缸的伸缩分别交替提升导轨和架体,来实现液压自爬模系统整体提升,具有操作方便、爬升速度快以及安全系数高的优点,非常适合高度在50m以上的薄壁空心高墩的施工。
3.当前针对薄壁空心高墩液压爬模施工一般是指墩身外模体系的整体爬升,即通过操作液压系统使得外模系统通过导轨向上爬升,而墩身内模则需要通过塔吊分节拆卸、吊装定位、预埋拉杆固定等工序,这使得墩身内模体系的施工成为制约百米高墩施工进度的关键因素。
技术实现要素:
4.针对现有技术中存在的问题,本发明提供了一种空心高墩施工用外爬内吊式施工装置及其使用方法,可减少每个节段墩身内模与井筒平台的拆除、吊装及安装工作,提高了爬升速度与整体施工效率,有效的缩短了施工工期,大大降低了施工成本。
5.为了解决上述技术问题,本发明通过以下技术方案予以实现:
6.一种空心高墩施工用外爬内吊式施工装置,包括外爬模装置和内吊装置,所述外爬模装置包括爬架体以及连接在所述爬架体上的外模板,所述内吊装置包括悬挑支架、第一吊杆、第二吊杆、内吊平台和内模板,所述悬挑支架的两端分别固定在两个正对设置的所述外爬模装置的爬架体顶部,两个正对设置的所述外爬模装置的外模板分别正对一个所述内模板,每个所述内模板分别与竖直设置的所述第一吊杆连接,且每个所述第一吊杆与所述悬挑支架滑动连接,每个所述第一吊杆的滑动方向为所述悬挑支架两端的延伸方向;所述第二吊杆竖直固定在所述悬挑支架上,且所述第二吊杆经过两个所述内模板之间,所述内吊平台连接在所述第二吊杆上。
7.进一步地,所述悬挑支架上滑动设置有滑动轮,每个所述第一吊杆与所述悬挑支架通过所述滑动轮连接。
8.进一步地,所述滑动轮上连接有驱动装置,所述驱动装置用于驱动所述滑动轮沿着所述悬挑支架两端的延伸方向做往复运动,所述驱动装置配置有启停控制接收单元。
9.进一步地,施工装置还包括设置在所述内模板和所述外模板上方的喷淋管道。
10.进一步地,两个所述内模板的上方和下方均设置有与所述第二吊杆连接的所述内吊平台。
11.进一步地,每个所述内模板和所述外模板的外侧面敷设有电热丝。
12.进一步地,所述外爬模装置还包括滑动连接在所述爬架体上的移动架,所述外模板固定在所述移动架上。
13.进一步地,所述外爬模装置还包括导轨,所述爬架体设置在所述导轨上。
14.一种空心高墩施工用外爬内吊式施工装置的使用方法,包括:
15.将所述外爬模装置安装在空心高墩墩身的外侧,将所述悬挑支架的两端固定在两个正对设置的所述外爬模装置的爬架体的顶部,将所述第一吊杆的一端滑动设置在所述悬挑支架上,将所述内模板连接在所述第一吊杆上,使得两个正对设置的所述外爬模装置的外模板分别正对一个所述内模板,将所述第二吊杆竖直固定在所述悬挑支架上,使得所述第二吊杆经过两个所述内模板之间,将所述内吊平台连接在所述第二吊杆上。
16.与现有技术相比,本发明至少具有以下有益效果:本发明提供的一种空心高墩施工用外爬内吊式施工装置,在使用时,当需要向上爬升时,控制第一吊杆在悬挑支架上带动内模板向背离外模板的一侧滑动,并控制外爬模装置的移动架带动外模板向背离内模板的一侧滑动,完成脱模后,控制外爬模装置向上爬升,连接在外爬模装置的爬架体顶部的悬挑支架同步上升,悬挑支架通过第一吊杆带动内模板同步上升,悬挑支架通过第二吊杆带动内吊平台同步上升。内模板和外模板同步上升到下一施工节段后,内模板和外模板相互靠近形成用于浇筑混凝土的模板空间,浇筑混凝土。采用本发明的外爬内吊式施工装置,在对空心高墩施工时,可减少每个节段内模板与井筒平台的拆除、吊装及安装工作,具有施工工期短的特点,同时仅需要一台塔吊配合施工,采用本发明的外爬内吊式施工装置,在显著降低施工成本的前提下,解决了百米高墩传统液压爬模体系内模施工的难题,极大提高了爬升速度与整体施工效率。
17.进一步地,本发明在施工装置还包括设置在内模板和外模板上方的喷淋管道,当一节段的混凝土浇筑完成后,利用喷淋管道可以更加方便的对混凝土进行养护。
18.为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
19.为了更清楚地说明本发明具体实施方式中的技术方案,下面将对具体实施方式描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
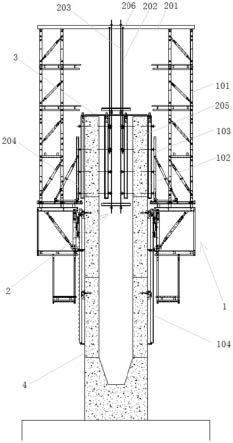
20.图1为本发明一种空心高墩施工用外爬内吊式施工装置的整体结构示意图;
21.图2为本发明一种空心高墩施工用外爬内吊式施工装置的内吊装置结构示意图;
22.图3为本发明一种空心高墩施工用外爬内吊式施工装置的外爬模装置结构示意图。
23.图中:1-外爬模装置;101-爬架体;102-外模板;103-移动架;104-导轨;2-内吊装置;201-悬挑支架;202-第一吊杆;203-第二吊杆;204-内吊平台;205-内模板;206-滑动轮;3-喷淋管道;4-空心高墩墩身。
具体实施方式
24.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.作为本发明的某一具体实施方式,结合图1、图2和图3所示,一种空心高墩施工用外爬内吊式施工装置,包括外爬模装置1和内吊装置2,其中,外爬模装置1为传统的爬模装置,其使用安装原理均为现有技术,其详细构造在本发明中不做赘述。简单的说,外爬模装置1包括爬架体101、外模板102、移动架103和导轨104,爬架体101滑动设置在导轨104上,移动架103滑动连接在爬架体101上,外模板102固定在移动架103上。
26.如图2所示,本发明提出的内吊装置2包括悬挑支架201、第一吊杆202、第二吊杆203、内吊平台204和内模板205,结合图1所示,悬挑支架201的两端分别固定在两个正对设置的外爬模装置1的爬架体101顶部,两个正对设置的外爬模装置1的外模板102分别正对一个内模板205,也就是说,一个内模板205与其对应的一个外模板102共同形成用于浇筑空心高墩墩身混凝土的模板空间。每个内模板205分别与竖直设置的第一吊杆202连接,且每个第一吊杆202与悬挑支架201滑动连接,每个第一吊杆202的滑动方向为悬挑支架201两端的延伸方向。
27.优选的,悬挑支架201上滑动设置有滑动轮206,每个第一吊杆202与悬挑支架201通过滑动轮206连接。更加优选的,滑动轮206上连接有驱动装置,驱动装置用于驱动滑动轮206沿着悬挑支架201两端的延伸方向做往复运动,驱动装置配置有启停控制接收单元,启停控制接收单元用于接收操作人员采用信号发射设备发送的驱动装置启停信号,并控制驱动装置驱动滑动轮206沿着悬挑支架201两端的延伸方向做往复运动。本实施例中,驱动装置采用步进电机。
28.结合图1所示,第二吊杆203竖直固定在悬挑支架201上,且第二吊杆203经过两个内模板205之间,内吊平台204连接在第二吊杆203上,内吊平台204给施工人员提供了站立操作平台。优选的,在两个内模板205的上方和下方均设置有与第二吊杆203连接的内吊平台204。
29.本实施例中,内模板205和外模板102均选用21mm进口维萨板,规格为2440*1220*21mm,竖楞为h20的木工字梁。在维萨板背面敷设电热丝,然后用岩棉填塞木工字梁间的间隙,架体外部和主平台上下均用厚塑料布封堵减少空气流通。
30.本发明的工作原理为:当需要向上爬升时,控制第一吊杆202在悬挑支架201上带动内模板205向背离外模板102的一侧滑动,并控制外爬模装置1的移动架103带动外模板102向背离内模板205的一侧滑动,完成脱模后,控制外爬模装置1向上爬升,连接在外爬模装置1的爬架体101顶部的悬挑支架201同步上升,悬挑支架201通过第一吊杆202带动内模板205同步上升,悬挑支架201通过第二吊杆203带动内吊平台204同步上升。内模板205和外模板102同步上升到下一施工节段后,内模板205和外模板102相互靠近形成用于浇筑混凝土的模板空间,浇筑混凝土。
31.在上述实施方式的基础上,作为更加优选的实施方式,如图1所示,施工装置还包括设置在内模板205和外模板102上方的喷淋管道3。具体地说,采用外径25mm镀锌钢管以活
连接形式设置闭合喷淋管道3,管道四角采用软管设置为活连接形式并留有一定富余量,每次模板拆除后移、爬升到位后即可通水养护,自动化程度高,养护效果显著。
32.本发明一种空心高墩施工用外爬内吊式施工装置的使用方法,包括:
33.将外爬模装置1安装在空心高墩墩身4的外侧,将悬挑支架201的两端固定在两个正对设置的外爬模装置1的爬架体101的顶部,将第一吊杆202的一端滑动设置在悬挑支架201上,将内模板205连接在第一吊杆202上,使得两个正对设置的外爬模装置1的外模板102分别正对一个内模板205,将第二吊杆203竖直固定在悬挑支架201上,使得第二吊杆203经过两个内模板205之间,将内吊平台204连接在第二吊杆203上。
34.本实施例中,一种空心高墩施工用外爬内吊式施工装置的爬升步骤,具体如下:
35.步骤一:待本次混凝土达到规范要求后,拆除外爬模装置的所有预埋拉杆,然后通过移动架带动外模板进行后移;
36.步骤二:在悬挑支架上安装滑动轮,滑动轮与内模板通过第一吊杆连接,内模板通过人工松动模板,使得内模板完全脱离空心高墩墩身;
37.步骤三:外模板后移到设定位置后,在退模留下的预埋爬锥上安装扶墙挂座,然后上移导轨至上部预埋爬锥处,待就位于上部预埋爬锥后进行固定;
38.步骤四:通过外爬模装置的液压系统顶升,保持导轨不动,启动液压系统,爬架体就相对于导轨向上移动,通过导轨和外模板交替附墙,带动内模板相互提升,外模板和内模板即可沿着墩身上预埋爬锥同步提升到位;
39.步骤五:绑钢筋、裁模板、安装预埋件;
40.步骤六:通过外爬模装置的高墩爬模精准安装装置在水平和竖直两个方向进行模板位置的微调、连接对拉螺杆,内外模板合模;
41.步骤七:浇注砼,待砼达到强度,通过移动架带动外模板后移,开始下一个循环爬升,爬升到位后即可通过喷淋管道通水养护;
42.步骤八:重复步骤一至步骤七,开始下一节空心高墩墩身的施工。
43.本发明在使用时,只需拆除预埋拉杆,专人对液压系统进行操控,进而通过外爬模装置爬升带动内吊装置提升,克服了塔吊高空吊装内模板的难点。
44.本发明适用于双肢薄壁空心高墩施工,加工方便,制造成本较低,仅需要一台塔吊配合施工,解决了现场施工作业面空间狭小的难题,具有施工成本低的优点,适于在现场应用。本发明通过外爬模装置爬升带动悬挑支架爬升,进而使得内模板实时同步提升,不仅加快了内模板的爬升效率,还解决了左右幅4个双肢墩柱之间塔吊作业空间不足的问题。
45.最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1