一种机械外骨骼的制作方法
1.本实用新型涉及穿戴设备技术领域,特别是涉及一种机械外骨骼。
背景技术:
2.机械外骨骼或称动力外骨骼(powered exoskeleton),是一种由钢铁的框架构成并且可让人穿上的机器装置,这个装备可以提供额外能量来供四肢运动。别称:强化服、动力服(power suit)、动力装甲(power armor或powered armor)、exoframe、hardsuit或exosuit等。
3.目前,机械外骨骼不能够对负重进行重量检测,导致无法对人体的疲劳程度进行评估。
技术实现要素:
4.本实用新型实施例旨在提供一种机械外骨骼,以解决现有技术中不能够对负重进行重量检测的问题。
5.本实用新型实施例解决其技术问题采用以下技术方案:提供一种机械外骨骼,包括:
6.托板,用于支撑负重;
7.承重座,用于支撑所述托板;
8.压力传感器,所述压力传感器设置于所述托板上或所述托板与承重座之间;以及
9.控制系统,与所述压力传感器电连接。
10.在一些实施例中,所述机械外骨骼还包括腰背板;
11.所述承重座固定连接所述腰背板,所述托板的一端连接于所述腰背板。
12.在一些实施例中,所述机械外骨骼还包括背架;
13.所述腰背板固定连接于所述背架的下部,所述托板展开于所述背架;
14.所述托板的一端铰接所述腰背板,所述托板可相对于所述背架转动,以从展开于所述背架的状态转换至重叠于所述背架的状态。
15.在一些实施例中,所述压力传感器为薄膜压力传感器。
16.在一些实施例中,当所述压力传感器设置于所述托板和所述承重座之间时,所述托板包括托板主体和凸台结构,所述托板主体用于支撑所述负重,所述凸台结构凸设于所述托板主体的面向所述承重座的一面,所述承重座具有承重面,所述薄膜压力传感器粘连于所述凸台结构或所述承重面上。
17.在一些实施例中,述凸台结构呈棱台或者圆台状,包括上底面和下底面;
18.所述下底面连接所述托板主体;
19.当所述薄膜压力传感器粘连于所述凸台结构时,所述薄膜压力传感器粘连于所述上底面;
20.当所述薄膜压力传感器粘连于所述承重面时,所述薄膜压力传感器抵接所述上底
面。
21.在一些实施例中,所述薄膜压力传感器面接触所述托板和/或所述承重座。
22.在一些实施例中,所述托板和所述薄膜压力传感器之间的接触面平行于所述承重座和所述薄膜式压力传感器之间的接触面。
23.在一些实施例中,所述背架和所述托板之间的角度为75~85度。
24.在一些实施例中,在所述承重座上开设有贯穿其自身的线口,所述压力传感器的线束经由所述线口电连接所述控制系统。
25.与现有技术相比较,本实用新型实施例提供的机械外骨骼中,通过在托板上或者托板与承重座之间设置压力传感器,能够较为直接地采集负重的重量信息,检测精度较高,以解决现有技术中不能够对负重进行重量检测的问题。
附图说明
26.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
27.图1是本实用新型其中一实施例提供的机械外骨骼的结构示意图;
28.图2是图1所示的机械外骨骼在另一角度下的结构示意图;
29.图3是图1所示的机械外骨骼的背架系统的结构示意图;
30.图4是图3所示的背架系统在另一角度下的结构示意图;
31.图5至图9是图1所示的机械外骨骼的腰背连接系统的结构示意图;
32.图10是图5所示的腰背连接系统的负重探测装置的系统框图;
33.图11是图1所示的机械外骨骼的大腿系统的结构示意图;
34.图12是图1所示的机械外骨骼的小腿系统的结构示意图;
35.图13是图1所示的机械外骨骼的脚部系统的结构示意图。
具体实施方式
36.为了便于理解本实用新型,下面结合附图和具体实施例,对本实用新型进行更详细的说明。需要说明的是,当元件被表述“连接”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“上”、“下”、“左”、“右”、“上端”、“下端”、“顶部”以及“底部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、等仅用于描述目的,而不能理解为指示或暗示相对重要性。
37.除非另有定义,本说明书所使用的所有的技术和科学术语与属于本实用新型的技术领域的技术人员通常理解的含义相同。在本实用新型的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本实用新型。
38.请参阅图1和图2,本实用新型其中一实施例提供一种机械外骨骼100,包括依次相连的背架系统10、腰背连接系统20、大腿系统30、小腿系统40以及脚部系统50。
39.请参阅图3和图4,背架系统10包括背架12、背带组件14以及托板16。背架12用于连
接腰背连接系统20,背带组件14和托板16分别设置在背架12的两相对侧。背带组件14用于将背架12固定在人体的肩背部上,托板16用于支撑负重18。在使用的过程中,托板16将负重18所施加的一部分压力通过背架12向背带组件14传递,另一部分压力向腰背连接系统20传递。
40.背架12大致呈板状或者框架状,包括相背设置的前表面120和后表面122。背带组件14设置在前表面120所面向的一侧,托板16和负重18设置在后表面122所面向的一侧。背架12的下边缘处连接腰背连接系统20。
41.背带组件14包括两背带140和胸带142。两背带140分别用于将人体的左、右肩背部压紧在背架12的前表面120上,以实现将背架12固定在人体的肩背部上。各背带140的上端连接背架12的上部,各背带140的下端连接腰背连接系统20。胸带142连接在两背带140之间。在使用的过程中,两背带140分别将背架12所施加的一部分压力向人体的左、右肩部传递,从而由人体的左、右肩部承担,另一部分压力通过胸带142向人体的胸部传递,从而由人体的胸部承担。
42.托板16铰接在腰背连接系统20上,可相对背架12转动,直至展开于或者折叠于背架12。其中,在展开于背架12时,可支撑负重18,在未支撑负重18时,可折叠于背架12,利于收纳。
43.托板16在展开于背架12时,托板16与背架12的夹角为75-85度,在本实施例中,该夹角为80度,以防止负重18向后滑落,并且可使得负重18的重心更靠近人体的背部,以减小负重18对人体的腰部的力矩。
44.可以理解,托板16也可以铰接在背架12上,只要托板16能够相对于背架12转动即可。
45.请参阅图5,腰背连接系统20包括腰背板组件22、腰带24以及腰杆组件26。腰背板22用于连接背架系统10,腰带24和腰杆组件26皆设置在腰背板组件22上,腰带24用于将腰背板组件22固定在人体的后腰部,腰杆组件26用于连接大腿系统30。在使用的过程中,腰背板组件22将背架12所施加的压力通过腰杆组件26向大腿系统传递30。
46.腰背板组件22包括腰背板220和安装导轨222。腰背板220大致呈u形板状,其两端之间的部位固定在背架12的下边缘处,具体可以通过螺钉、铆钉、焊层等连接结构进行固定,腰背板220的两端之间的部位基本平行于背架12的下边缘,腰背板220的两端朝一侧延伸至超出背架12的前表面120,用于分别连接腰带24的两端,腰带24用于将人体的后腰部压紧在腰背板220的两端之间的部位上,以实现将腰背板22固定在人体的后腰部上。
47.安装导轨222固定在腰背板220的背向腰带24的一面上,具体可以通过螺钉、铆钉、焊层等连接结构进行固定。安装导轨222的长度方向平行于背架12的下边缘,安装导轨222滑动连接腰杆组件26。
48.请参阅图6,腰杆组件26包括滑动锁紧装置260、腰部支撑杆262以及髋关节264。腰部支撑杆262连接在滑动锁紧装置260和髋关节264之间,滑动锁紧装置260用于滑动连接安装导轨222,髋关节264用于连接大腿系统30。在使用的过程中,滑动锁紧装置260将腰背板22所施加的压力依次通过腰部支撑杆262、髋关节264向大腿系统30传递。
49.滑动锁紧装置260可在锁紧状态和解锁状态之间切换,在切换至锁紧状态时,固定在安装导轨222上,在切换至解锁状态时,可沿安装导轨222移动,以带动腰部支撑杆262一
并移动。
50.请参阅图7,腰部支撑杆262大致呈l形杆状,包括第一杆部2620和第二杆部2622。第一杆部2620连接在滑动锁紧装置260和第二杆部2622之间,第二杆部2622连接在第一杆部2620和髋关节264之间。第一杆部2620的长度方向基本垂直于转动轴线x,第二杆部2620超出安装导轨222。第二杆部2622之间用于容纳人体的腰部,其中两腰杆组件26的第二杆部2622分别靠近人体的左、右腰部。
51.通过腰部支撑杆262相对于安装导轨222移动,可使得两腰杆组件260的第二杆部2622相互靠近或者远离,能够适应腰部宽度不同的人体。
52.髋关节264的一端铰接在第二杆部2620上,可绕相对于腰杆组件转动。髋关节264的另一端铰接在大腿系统30上,大腿系统30可相对于髋关节264转动,转动轴线x、髋关节264关于第二杆部2620的转动轴线y、大腿系统30关于髋关节264的转动轴线z两两相互垂直。
53.腰部支撑杆262绕转动轴线x转动时,带动大腿系统30一并转动,与人体的大腿的内收或者外摆的动作相匹配,髋关节264绕转动轴线y转动时,带动该大腿系统30一并转动,与人体的大腿的左旋、右旋的动作相匹配,该大腿系统30绕转动轴线z转动时,与人体的大腿的屈曲或者伸展的动作相匹配。
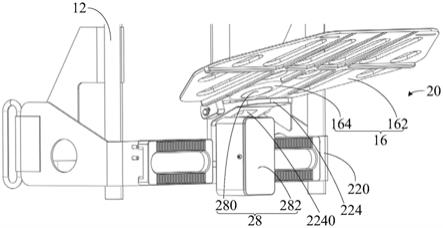
54.请参阅图8和图9,托板16的一端铰接在腰背板220上。托板16包括托板主体和凸台结构164,托板主体用于支撑负重11,托板主体包括正面160和背面162,正面160即托板16在支撑负重18时面向负重18的一面,背面162即托板16在支撑负重18时背向负重18的一面,其中负重18如图3所示。凸台结构164凸设于背面162。
55.可以理解,根据实际需要,托板16也可以固定连接腰背板220。
56.腰背板组件22还包括承重座224。承重座224和安装导轨222位于腰背板220的同一侧,承重座224固定连接腰背板220,具体可以通过螺钉、铆钉、焊层等连接结构进行固定。在托板16展开于背架12时,承重座224位于托板16的背面162所面向的一侧,用于以支撑托板16,以避免负重18过重导致托板16的铰接结构损坏的问题。具体地,承重座224通过凸台结构164支撑托板主体。
57.腰背连接系统20还包括负重探测装置28。
58.负重探测装置28包括压力传感器280和控制系统282。压力传感器280电性连接控制系统282。
59.托板16在展开于背架12时,压力传感器280设置在托板16和承重座224之间,用于采集负重18的重量信息。
60.可以理解,根据实际需要,压力传感器280也可以设置在托板16上。其中,压力传感器280设置在托板16上,可以是压力传感器压力传感器280设置于托板16的正面160上,也可以是压力传感器280设置在托板16内,也即设置于托板16的正面160与反面162之间。压力传感器280设置于托板16内时,托板16在支撑负重11时,托板16的正面160部分需要能够轻微形变,以将负重11的压力传递至压力传感器280。
61.压力传感器280粘连于托板16。
62.压力传感器280可以为薄膜压力传感器,大致呈片状。薄膜压力传感器具有体积小、灵敏度高、功耗低、价格便宜等优点。
63.凸台结构164大致呈圆台状,包括上、下底面,上底面为直径较大的圆,下底面为直径较小的圆。下底面连接托板16的背面162,薄膜压力传感器粘连在上底面上,具体可以通过胶层进行固定,凸台结构164能够提高薄膜压力传感器的检测精度。
64.凸台结构164的参数可以设计如下:
65.上底面直径为30mm,下底面直径为50mm,高为2mm。
66.可以理解,凸台结构164并不限制为圆台状,根据实际需要,凸台结构还可以为三棱台、四棱台、五棱台等棱台状。
67.托板16在支撑负重18时,托板16将薄膜压力传感器压在承重座224上。托板16和薄膜压力传感器之间的接触面平行于薄膜压力传感和承重座224之间的接触面,以保证薄膜压力传感器分别面接触托板16和承重座224,能够提高薄膜压力传感器的检测精度。
68.可以理解,根据实际需要,压力传感器280也可以粘连于承重座224的承重面,承重面也即承重座224用于支撑托板16的面,在托板16展开于背架11时,薄膜压力传感器接触凸台结构164的上底面。
69.控制系统282固定连接腰背板220,在托板16展开于背架12时,承重座224位于托板16和控制系统之间,在承重座224上开设有贯穿其接触面和面向控制系统282的一面的布线口2240,用于供薄膜压力传感器的线束通过,以与控制系统282电性连接。
70.控制系统282包括主控模组和无线通信模组。控制系统282可以通过电信的nb-iot通讯单元,将薄膜压力传感器所采集的重量信息传输至后台服务器,以实现负重18的重量数据的实时传输和显示。
71.无线通讯模组可以包括低功耗的nb-iot单元。
72.主控制模组可以包括低功耗的微控制单元(microcontroller unit;mcu)。
73.请参阅图10,负重探测装置28工作时,具体如下:
74.压力传感器280检测所采集的负重的重量信息,通过adc接口传输至控制系统282的主控制模组,主控制模组通过uart/i2c接口与控制系统282的无线通讯模组进行通讯,无线通讯模组通过nb基站和udp/coap接口协议将数据传输到后台服务器和用户界面,选用电信或者移动nb-iot模块。
75.请参阅图11,大腿系统30包括大腿骨架32、大腿绑缚组件34、大腿关节座36以及储能装置38。大腿骨架32的上端铰接髋关节264,下端固定连接大腿关节座36,大腿关节座36铰接小腿系统40,大腿绑缚组件34和储能装置38皆设置在大腿骨架32上,大腿绑缚组件34用于将大腿骨架32固定在人体的大腿上,储能装置38用于在小腿系统40相对于大腿关节座36转动至预设角度范围内时储能,并在小腿系统40相对于大腿关节座36转动至预设角度范围外时释能。在使用的过程中,大腿骨架32将髋关节264所施加的压力通过大腿关节座36向小腿系统40传递。
76.大腿骨架32包括第一大腿杆件320、第二大腿杆件322以及大腿锁紧装置324。第一、二大腿杆件320、322的长度方向相平行,第一大腿杆件320的上端为大腿骨架32的上端,铰接髋关节264,第一大腿杆件320的下端滑动连接第二大腿杆件322的上端,第二大腿杆件322的下端固定连接大腿关节座36,大腿绑缚组件34设置在第二大腿杆件322上。大腿锁紧装置324将第二大腿杆件322锁紧在第一大腿杆件320上,在解锁时,容许第二大腿杆件322沿第一大腿杆件320移动,以调整大腿骨架32的长度,从而适应大腿长度不同的人体。在使
用的过程中,第一大腿杆件320将髋关节264施加的压力依次通过第二大腿杆件322、大腿关节座36向小腿系统40传递。
77.第二大腿杆件322中空,第二大腿杆件322的内部空间可以用于容纳储能装置38。
78.大腿绑缚组件34包括大腿挡板和大腿绑带。大腿挡板可以通过前述的连接结构固定在第二大腿杆件上,大腿挡板大致呈具有弧度的板状,用于与人体的大腿紧密贴合,以使人体的大腿运动时能够实时带动整个大腿系统30运动。在大腿挡板上可以开设有均匀分布的矩形通孔,以达到减重和散热的目的。
79.大腿绑带大致呈条状,可由柔软的纺织材料制得。大腿绑带的一部分固定在大腿挡板上,另一部分固定在第二大腿连接杆上,大腿绑带的上述两部分可通过魔术贴进行粘连,用于将人体的大腿压紧在大腿挡板上,以实现将大腿骨架32固定在人体的大腿上。
80.储能装置38包括凸轮380、压簧382、压块384以及拉绳386。凸轮386的中心线与大腿关节座36的中心线相重合,并固定连接小腿系统40。凸轮386的凸轮面包括第一轮面部和第二轮面部,第一轮面部的直径大于第二轮面部的直径,第一轮面部和第二轮面部平滑过渡。第二轮面的弧度可以为55度。压块384滑动连接第二大腿连接杆322,压簧382设置在压块384和凸轮380之间,拉绳386的上端固定在压块384上,拉绳386的下端固定连接小腿系统40上,拉绳386的上、下两端之间的部分绕设在凸轮380的轮面上。在小腿系统40相对于大腿关节座36转动时,拉绳386绕设在轮面上的部位增多或者减小。
81.在小腿系统40相对于大腿关节座36转动至预设角度范围内时,对应人体的屈膝动作,拉绳386从第二轮面部绕设至第一轮面部,拉绳386的上端移动至靠近凸轮380的位置上,拉绳386的上端拉动压块384,压块384压缩压簧382,压簧382储能。
82.在小腿系统40转动至预设角度范围外时,对应人体的处于支撑相的动作,拉绳386解除对第一轮面部的缠绕,拉绳386的上端移动至远离凸轮380的位置上,压簧382释能,推动压块384,压块384拉动拉绳386,拉绳386拉动小腿系统40。
83.请参阅图12,小腿系统40包括膝关节42、小腿骨架44、小腿关节座46、小腿绑缚组件48以及拉绳锁紧件49。膝关节42铰接大腿关节座36,小腿骨架44的上端固定连接膝关节42,小腿骨架44的下端固定连接小腿关节座46,小腿关节座46铰接脚部系统50上,小腿绑缚组件48设置在小腿骨架44上,用于将小腿骨架44固定在人体的小腿上,拉绳锁紧件49固定拉绳386的下端。在使用的过程中,膝关节42将大腿关节座36所施加的压力依次通过小腿骨架44、小腿关节座46向脚部系统50传递。
84.膝关节36的中心线与凸轮380的中心线相重合,凸轮380固定在膝关节36上。
85.小腿骨架44包括第一小腿连接杆440、第二小腿连接杆442以及小腿锁紧装置444。第一、二小腿连接杆440、442的长度方向相平行,第一小腿连接杆440的上端为小腿骨架44的上端,固定连接膝关节42,第一小腿连接杆440的下端滑动连接第二小腿连接杆442的上端,第二小腿连接杆442的下端为小腿骨架44的下端,固定连接小腿关节座46,小腿锁紧装置444将第二小腿连接杆442锁紧在第一小腿连接杆440上,在解锁时,第二小腿连接杆442可沿第一小腿连接杆440移动,以适应小腿长度不同的人体。
86.第一小腿连接杆442中空,第一小腿连接杆442的内部空间可以用于容纳拉绳386的下端和拉绳锁紧件49。
87.小腿绑缚组件48包括小腿挡板和小腿绑带。小腿挡板可以通过前述的连接结构固
定在第一小腿连接杆442上,小腿挡板大致呈具有弧度的板状,用于与人体的小腿紧密贴合,以使人体的小腿运动时能够实时带动整个小腿系统40运动。在小腿挡板上可以开设有均匀分布的矩形通孔,以达到减重和散热的目的。
88.小腿绑带大致呈条状,可由柔软的纺织材料制得。小腿绑带的一部分固定在小腿挡板上,另一部分固定在第一小腿连接杆442上,小腿绑带的上述两部分可通过魔术贴进行粘连,用于将人体的小腿压紧在小腿腿挡板上,以实现将小腿骨架44固定在人体的小腿上。
89.请参阅图13,脚部系统50包括踝关节52、踝关节支撑座54、脚底板56以及脚部绑带58。踝关节52的一端铰接小腿支撑座46,踝关节52的另一端铰接踝关节支撑座54,踝关节支撑座54固定连接脚底板56,脚部绑带58设置在脚底板56上,用于将脚底板56固定在人体的脚底。在使用的过程中,踝关节52将小腿关节座46所施加的压力依次通过踝关节支撑座54、脚底板56向地面传递,从而由地面承担。
90.踝关节52可相对于小腿关节座46转动,以带动脚底板56转动,与人体的脚部的内收或者外摆动作相匹配。踝关节支撑座54可相对于踝关节52转动,以带动脚底板56转动,与人体的脚部的前屈或者后伸的动作相匹配。髋关节264相对于腰部支撑杆262转动时,带动脚底板56转动,与人体的脚部的左旋或者右旋动作相匹配,其中髋关节264和腰部支撑杆262如图8所示。
91.髋关节52关于小腿关节座46的转动轴线垂直于髋关节支撑座54关于髋关节52的转动轴线。
92.在其他一些实施例中,压力传感器280设置在脚底板56,用于采集穿戴者和负重的总重量。相比较于将压力传感器280设置在脚底板56上,压力传感器280设置在托板16上能够更为直接地采集负重18的信息,检测精度更高。
93.与现有技术相比较,本实用新型实施例提供的机械外骨骼中,通过在托板上或托板与承重座之间设置压力传感器,能够较为直接地采集负重的重量信息,检测精度较高,以解决现有技术中不能够对负重进行重量检测的问题。
94.最后应说明的是:以上实施例仅用以说明本实用新型的技术方案,而非对其限制;在本实用新型的思路下,以上实施例或者不同实施例中的技术特征之间也可以进行组合,步骤可以以任意顺序实现,并存在如上所述的本实用新型的不同方面的许多其它变化,为了简明,它们没有在细节中提供;尽管参阅前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1