电动夹爪及其夹具组件的制作方法
1.本实用新型涉及机器人领域,具体地,涉及一种电动夹爪及其夹具组件。
背景技术:
2.随着机器人技术的不断发展和应用,机器人的优点越来越凸显,比如机器人可以辅助甚至代替人类完成繁重复杂的工作,例如酒店清洁机器人,可代替进行打扫酒店卫生间的工作。
3.现有技术中,机械手包括电动夹爪及其末端的夹爪,其工作的过程一般为:夹爪张开,电动夹爪运动到相应的安放执行工具的位置旁,夹爪合拢抓住执行工具,电动夹爪按之前的运动规划到需工作的场地带动执行工具开始工作。其中,夹爪能否顺利、精准取到相应的执行工具不仅关系到机器人的操作精度,更影响其能否完成相应的工作,以及工作执行的效果及效率。
4.经现有技术检索发现,中国发明专利公开号为cn110919681a,公开了一种机器人末端工具快速接换装置及接换方法,涉及机器人末端执行器的自动换接技术领域。其包括第一装配体和第二装配体;当第一装配体与第二装配体连接时,第二装配体通过勾接部 b与第一装配体的勾接部a相互勾接,工具盘上的锁定臂与基座上的定位缺口相抵,对接锁定组件用于锁定臂的同时带动母接头与公接头对接,或解锁锁定臂的同时带动母接头与公接头分离。该装置虽然可接换,但结构设计复杂,作业效率不佳。
技术实现要素:
5.针对现有技术中的缺陷,本实用新型的目的是提供一种电动夹爪用夹具组件及其电动夹爪。
6.根据本实用新型提供的一种电动夹爪用夹具组件,包括夹爪、夹头以及定位销;
7.所述夹爪包括连接板和夹板,所述连接板与所述夹板一体成型,所述定位销的一端连接于所述夹板上;
8.所述夹头上设有定位孔,所述夹板夹持所述夹头时,所述定位销的另一端插接于所述定位孔内。
9.一些实施方式中,所述夹板上设有连接孔,所述定位销的一端连接于所述连接孔内。
10.一些实施方式中,所述定位销包括法兰板和定位柱,所述定位柱坐落于所述法兰板上形成t型结构,所述法兰板连接于所述连接孔内。
11.一些实施方式中,所述法兰板与所述连接孔通过螺纹连接、焊接或过盈配合连接。
12.一些实施方式中,所述连接孔台阶型通孔。
13.一些实施方式中,所述定位销还包括导引头,所述导引头为自所述定位柱的自由端向外延伸形成的锥体结构,所述定位柱的自由端是指与所述法兰板相对的一端。
14.一些实施方式中,连接于所述夹板上所述定位销有多个,多个所述定位销间隔分
布于同一圆周上。
15.一些实施方式中,所述夹板与所述夹头相贴合的一面为磨砂粗糙面或滚花粗糙面。
16.一些实施方式中,与所述夹头匹配连接的所述夹爪的数量为2-4块。
17.本实用新型还提供了一种电动夹爪,采用所述的电动夹爪用夹具组件,还包括机械臂、深度相机和执行工具;
18.多个所述夹爪连接于所述机械臂的末端,所述深度相机安装于所述机械臂上并用于识别定位待夹取物件,所述夹头夹持所述执行工具。
19.与现有技术相比,本实用新型具有如下的有益效果:
20.1、本实用新型结构简单,体积小巧、紧凑,空间利用率高,制作成本低。
21.2、本实用新型通过夹爪上设置定位销以及与夹头上设置于定位销插接配合的定位孔,使得夹爪夹紧夹头后两者的相对位置关系固定且唯一,同时可有效防止夹爪与夹头因摩擦力不足而引起的相对滑动或转动。
22.3、本实用新型通过优化定位销的结构以及定位销于连接板上的结构布局,提高夹爪与夹头间的配合精度以及配合方式的多样性。
23.4、本实用新型可减少夹爪对夹具的握持力,降低对夹爪夹持力的要求,从而可使用更小型号的夹爪,使手臂更轻巧灵活,节约能源。
24.5、本实用新型能自动导向定位,对机械臂的绝对精度与重复定位精度容许度高,从而降低对机器视觉及相应3d相机的要求,以及对机械臂的算法精度的要求,降低对整个机器人的系统精度的要求。
附图说明
25.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
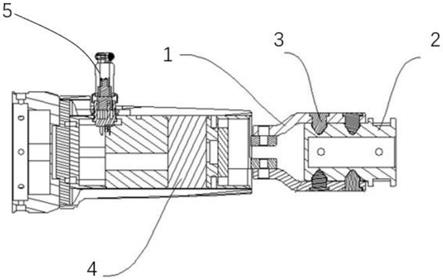
26.图1为本实用新型电动夹爪用夹具组件安装于机械臂后的结构示意图;
27.图2为本实用新型夹爪的结构示意图;
28.图3为本实用新型夹头的结构示意图;
29.图4为本实用新型定位销的结构示意图;
30.图5为本实用新型电动夹爪的爆炸结构示意图。
具体实施方式
31.下面结合具体实施例对本实用新型进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。这些都属于本实用新型的保护范围。
32.实施例1
33.本实用新型提供了一种电动夹爪用夹具组件,如图1-4所示,包括夹爪1、夹头2 以及定位销3。夹爪1安装于电动夹爪的机械臂的末端,用于夹持夹头2,而夹头2则用于夹持执行工具,由执行工具抓取物件,同时夹持夹头2的夹爪1为多个,至少为2 个,亦可为3个及其
以上数量的夹爪,优选的,与一个夹头2配合的夹爪1的数量为2-4 个。夹爪1包括连接板11和夹板12,连接板11与夹板12为一体成型,优选的,连接板11的宽度小于夹板12的宽度,且自连接板11过渡至夹板12的过渡处进行圆滑曲线处理,加强夹爪1整体结构强度的同时减轻夹爪1的重量。连接板11上开设有固定螺孔,固定螺孔用于和电动夹爪的机械臂末端相应的驱动结构连接,连接板11优选为具有一钝角夹角的折板,其钝角的范围大于等于135
°
,夹板12用于夹持夹头2,其形状与夹头2的壳体形状相适配,如夹头2的壳体形状为矩形时,则夹板12的形状为平板结构。
34.定位销3安装于夹板12上,其连接方式可为焊接、螺纹连接以及过盈配合连接等。优选的,夹板12上设有连接孔121,连接孔121的内圈设有内螺纹,定位销3的端部设有外螺纹,定位销3与连接孔121螺纹连接,方便拆卸。夹头2的壳体上设有定位孔21,定位孔21用于和定位销3适配插接。
35.本实用新型的工作原理为:多个夹爪1通过连接板11安装于电动夹爪的机械臂的末端,通过机械臂的驱动机构实现安装于末端构件上的多个夹爪1的开合运动,夹爪1 夹持夹头2时,首先位于夹板12上的定位销3与夹头2壳体上的定位孔21进行适配插接,其后通过进一步加大驱动力使得夹头2被多个夹爪1所夹紧。本实用新型通过夹爪上设置定位销以及与夹头上设置与定位销插接配合的定位孔,使得夹爪夹紧夹头后两者的相对位置关系固定且唯一,同时可有效防止夹爪与夹头因摩擦力不足而引起的相对滑动或转动。
36.实施例2
37.本实施例2是在实施例1的基础上形成,通过优化定位销的结构以及定位销于连接板上的结构布局,提高夹爪与夹头间的配合精度以及配合方式的灵活性。具体地:
38.如图1-4所示,定位销3包括法兰板31和连接柱32,法兰板31优选为为圆形板,连接柱32优选为圆柱体。连接柱32的一端坐落于法兰板31的板面上,优选的,两者的中心轴线重合。此时,夹头2壳体上的定位孔21优选为阶梯孔,使得法兰板31嵌入定位孔21中后,其法兰板31的外表面与夹头2的壳体的外表面相齐平。通过阶梯孔与法兰式结构的定位销可进一步提高夹爪与夹头间的配合精度。进一步地,定位销3还包括导引头33,导引头33是自连接柱32的自由端向外延伸形成的锥体结构,其导引头 33优选为子弹头结构形式的锥体结构。导引头可有效提高夹爪与夹头的配合连接效率,同时降低了视觉识别装置对物体的精度要求。
39.进一步地,布置于连接板12上的定位销3的数量为多个,相应地,夹头2上设置的定位孔21与定位销3的数量、位置均进行适配设置。通过同一个侧面上多个定位销与多个定位孔的适配插接,可进一步提高夹爪与夹头的配合精度。优选的,多个定位销 3于连接板12上的布设为沿同一圆周间隔分布,所谓同一圆周间隔分布即多个定位销3 沿圆周线间隔一定距离分布,优选的是等间距分布。例如,当定位销3的数量为4个时, 4个定位销3沿同一圆周等间距分布,此时,夹爪1可以通过竖向和横向两个方向与夹头2配合连接,增加了夹爪夹取夹头方式的灵活性,以便更好地适应不同的作业场景。
40.进一步地,于连接板12与夹头2壳体相接触的板面上通过磨砂处理形成磨砂粗糙面或通过滚刀处理形成滚花粗糙面,通过磨砂粗糙面或滚花粗糙面增加夹爪1与夹头2 之间的静摩擦力,提高夹爪与夹头两者的配合精度。
41.实施例3
42.本实施例3是在实施例1或实施例2的基础上形成的一种电动夹爪,如图1-5所示,采用实施例1或实施例2的电动夹爪用夹具组件,还包括机械臂4、深度相机5和执行工具6。连接板11连接于机械臂4末端的驱动结构件上,深度相机5安装于机械臂4 上并用于识别定位待夹取物件,执行工具6夹持于夹头2上。深度相机5可为英特尔 realsensed455深度感知摄像头。本实用新型能自动导向定位,对机械臂的绝对精度与重复定位精度容许度高,从而降低对机器视觉及相应3d相机的要求,以及对机械臂的算法精度的要求,降低对整个机器人的系统精度的要求。
43.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
44.以上对本实用新型的具体实施例进行了描述。需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1