基于力觉传感器的协作机器人控制方法及协作机器人与流程
1.本发明涉及协作机器人技术领域,具体涉及一种基于力觉传感器的协作机器人控制方法及协作机器人。
背景技术:
2.协作机器人,指新一代的用于和人进行交互、协同工作的机器人。相对于传统的工业机器人,由于该类机器人被设计用于在生产线上与操作员协同工作,因此该类机器人在设计之初便需要考虑较高的安全性指标。为避免协作机器人在工作时与人发生碰撞进而造成安全事故,该类协作机器人通常会设置有一个或多个力觉传感器,以采集到机器人各部位的力度数据,从而判断出机器人是否与外界物体,比如操作员、其他设备等发生碰撞,进而控制机器人进行急停或回避,以避免安全事故的发生。
3.但是,在实际实施过程中,发明人发现,现有技术中的协作机器人,其基于力觉传感器实现的碰撞检测功能仅能够在协作机器人独立运动时正常工作。当协作机器人需要操作外界物体,尤其是向外界物体施加一定压力,比如,在工件上钻孔、粘合物体时,容易因为自由端受到外界物体的反作用力导致误报警。针对这一问题,现有技术中通常是在该类场景中关闭报警功能。比如,在移动工件时开启碰撞报警,随后在对工件加工时关闭碰撞报警,以使得协作机器人能够正常工作。不过这一方法并未实质性解决这一问题,其在关闭碰撞报警的过程中仍可能存在一定的安全风险。
技术实现要素:
4.针对现有技术中存在的上述问题,现提供一种基于力觉传感器的协作机器人控制方法及协作机器人。
5.具体技术方案如下:
6.一种基于力觉传感器的协作机器人控制方法,所述协作机器人包括一个机械臂,所述机械臂的自由端上设置有一第一力觉传感器;所述协作机器人上还设置有至少一个第二力觉传感器;
7.则所述协作机器人控制方法具体包括:
8.步骤s1:于所述第一力觉传感器上设置第一物体,根据所述第一物体构建工具坐标系;
9.步骤s2:分别采集所述第一力觉传感器的第一力度数据和所述第二力觉传感器的第二力度数据;
10.步骤s3:于所述工具坐标系中采用所述第一力度数据对所述第二力度数据进行补偿,以获得实际力度数据;
11.步骤s4:采用所述实际力度数据控制所述协作机器人。
12.优选地,所述步骤s1包括:
13.步骤s11:将所述第一物体设置在所述第一力觉传感器上;
14.步骤s12:根据所述第一物体对所述协作机器人进行负载设置;
15.步骤s13:根据所述第一物体构建所述工具坐标系。
16.优选地,所述步骤s12中,对所述协作机器人进行负载设置的同时,还获取所述第一物体和所述第一力觉传感器的质量和重心。
17.优选地,所述步骤s3包括:
18.步骤s31:根据所述第一力度数据在所述工具坐标系中生成多个第一矢量力,以及,根据所述第二力度数据在所述工具坐标系中生成多个第二矢量力;
19.步骤s32:对每个所述第二矢量力分别采用对应的所述第一矢量力生成补偿力度分量;
20.步骤s33:根据多个所述补偿矢量力生成所述实际力度数据。
21.优选地,所述步骤s4包括:
22.步骤s4:判断所述实际力度数据是否大于一碰撞力度阈值;
23.若是,表明所述协作机器人发生了碰撞,停止所述协作机器人;
24.若否,表明所述协作机器人未发生碰撞。
25.一种协作机器人,用于实施上述的协作机器人控制方法,包括:
26.机器人主体,所述机器人主体上设置有一机械臂;
27.所述机械臂的自由端用于安装第一物体;
28.所述自由端上设置有第一力觉传感器;
29.所述协作机器人上还设置有第二力觉传感器;
30.还包括一控制器,所述控制器分别连接所述第一力觉传感器和所述第二力觉传感器。
31.优选地,所述控制器内包括:
32.第一采集子模块,所述第一采集子模块连接所述第一力觉传感器,所述第一采集子模块获取所述第一力觉传感器上的第一力度数据;
33.第二采集子模块,所述第二采集子模块连接所述第二力觉传感器,所述第二采集子模块获取所述第二力觉传感器上的第二力度数据;
34.坐标系设定子模块,所述坐标系设定子模块连接所述机械臂。所述坐标系设定子模块根据所述第一物体构建工具坐标系;
35.补偿子模块,所述补偿子模块连接所述第一采集子模块,所述第二采集子模块和所述坐标系设定子模块,所述补偿子模块根据所述工具坐标系采用所述第一力度数据对所述第二力度数据进行补偿,从而生成实际力度数据;
36.碰撞报警子模块,所述碰撞报警子模块连接所述补偿子模块,所述碰撞报警子模块根据所述实际力度数据判断所述协作机器人是否发生碰撞。
37.优选地,所述机器人主体和所述机械臂上分别设置有多个所述第二力觉传感器;
38.所述机械臂的关节内部设置有所述第二力觉传感器;
39.所述机器人主体上分布有多个所述第二力觉传感器。
40.优选地,所述控制器设置在一控制柜中,所述控制柜中设置有一示教器;
41.所述示教器连接所述控制器,以向所述控制器中输入补偿程序。
42.上述技术方案具有如下优点或有益效果:通过在机械臂的自由端上设置第一力觉
传感器,从而采集到第一物体对第二物体进行接触时的反作用力,并根据生成的第一力度数据对第二力觉传感器生成的第二力度数据进行补偿,从而获得真实的、因外界物体碰撞生成的力度数据,有效判断出协作机器人是否发生碰撞,提高了设备安全性。
附图说明
43.参考所附附图,以更加充分的描述本发明的实施例。然而,所附附图仅用于说明和阐述,并不构成对本发明范围的限制。
44.图1为本发明实施例的整体示意图;
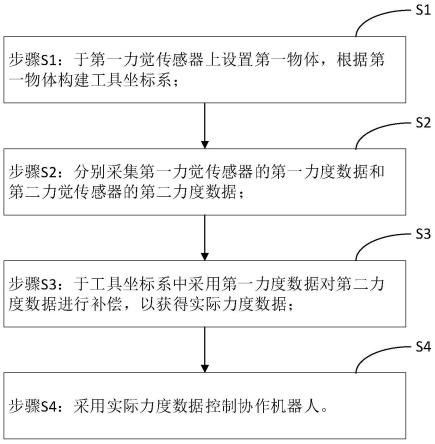
45.图2为本发明实施例中控制方法示意图;
46.图3为本发明实施例中步骤s1子步骤示意图;
47.图4为本发明实施例中步骤s4子步骤示意图;
48.图5为本发明实施例中步骤s4子步骤示意图;
49.图6为本发明实施例中协作机器人示意图。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
51.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
52.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
53.本发明包括:
54.一种基于力觉传感器的协作机器人控制方法,适用于如图1所示的协作机器人,协作机器人包括一个机械臂a1,机械臂a1的自由端上设置有一第一力觉传感器a2;协作机器人上还设置有至少一个第二力觉传感器;其中,第一力觉传感器a2通过法兰与机械臂a1固定连接,第二力觉传感器分布于协作机器人上,包括机器人主体各部位及机械臂关节处。
55.该协作机器人用于通过机械臂a1控制第一物体a3,对设置在工作台a5上的第二物体a2进行加工。根据实际需要可对第一物体a3和第二物体a4的类型进行适应性调整。比如,在一实施例中,第一物体a3为熨斗,第二物体a4为汽车座椅,该协作机器人用于对汽车座椅进行熨烫。或者,在另一实施例中,第一物体a3为螺丝刀,第二物体a4为工件上的螺丝,该协作机器人用于拧紧螺丝等等。
56.则如图2所示,协作机器人控制方法具体包括:
57.步骤s1:于第一力觉传感器上设置第一物体,根据第一物体构建工具坐标系;
58.步骤s2:分别采集第一力觉传感器的第一力度数据和第二力觉传感器的第二力度数据;
59.步骤s3:于工具坐标系中采用第一力度数据对第二力度数据进行补偿,以获得实际力度数据;
60.步骤s4:采用实际力度数据控制协作机器人。
61.具体地,针对现有技术中的协作机器人,在工作过程中会因为工件接触导致力觉传感器误判,进而使得碰撞检测功能无法正常工作的问题,本实施例中,通过在机械臂a1的自由端上设置第一力觉传感器a2,采集因第一物体a3接触第二物体a4受到的压力以生成第一力度数据。由于第一力觉传感器a2仅采集机械臂上的受力信息,因此能够对机器人主体上的第二力觉传感器生成的第二力度数据进行补偿,得到实际力度数据,进而有效判断出当前协作机器人是否受到了碰撞,提高了协作机器人的安全性。
62.在实际实施过程中,上述过程与机器人的控制过程同时执行,即,在运行机器人的运动轨迹程序的同时,采用上述方法对第二力觉传感器采集到的数据进行实时补偿,从而判断出机器人主体的实际受力情况。
63.在一种较优的实施例中,如图3所示,步骤s1包括:
64.步骤s11:将第一物体设置在第一力觉传感器上;
65.步骤s12:根据第一物体对协作机器人进行负载设置;
66.步骤s13:根据第一物体构建工具坐标系。
67.具体地,针对现有技术中的协作机器人,在工作过程中会因为工件接触导致力觉传感器误判,进而使得碰撞检测功能无法正常工作的问题,本实施例中,通过在设置了第一物体后构建工具坐标系,从而对第一物体上所受到的力度给定相应的方向,从而有效获取到机械臂的自由端在各加工时刻接收到的力的分量,便于对第二力觉传感器获取到的第二力度数据进行补偿。
68.在实施过程中后,为实现较好的补偿效果,可在第一物体与第二物体的接触面上设置工具坐标系的原点,并将该接触面作为坐标系的其中一个平面,从而在获取第一物体上的受力信息的同时,在工具坐标系中给定相应的受力方向。通过该设置方法可根据接触面的不同,比如,第二物体的上表面或侧面,设置不同的受力方向,进而针对不同的受力方向设置相应的补偿程序。
69.在一种较优的实施例中,步骤s12中,对协作机器人进行负载设置的同时,还获取第一物体的质量和重心。
70.具体地,为实现较好的补偿效果,本实施例中还在负载设置的过程中,获取第一物体的质量和重心,并将质量和重心纳入负载设置的过程中,从而实现对第一物体造成的力矩的补偿,以获得较为准确的第一力度数据。
71.在一种较优的实施例中,如图4所示,步骤s3包括:
72.步骤s31:根据第一力度数据在工具坐标系中生成多个第一矢量力,以及,根据第二力度数据在工具坐标系中生成多个第二矢量力;
73.步骤s32:对每个第二矢量力分别采用对应的第一矢量力生成补偿矢量力;
74.步骤s33:根据多个补偿矢量力生成实际力度数据。
75.具体地,针对现有技术中的协作机器人,在工作过程中会因为工件接触导致力觉传感器误判,进而使得碰撞检测功能无法正常工作的问题,本实施例中,通过采用第一力度数据的第一矢量力,包括{f1x(tm),f1y(tm),f1z(tm)},分别对相对应的第二矢量力{fx1(tp),fy1(tp),fz1(tp)}进行补偿,从而获得准确的补偿矢量力{fx(t),fy(t),fz(t)},进而判断出当前机器人实际受到的碰撞力度。
76.作为可选的实施方式,第一力觉传感器和第二力觉传感器的采样时间点相同。通
过设置相同的采样时间点,可使得第一力觉传感器和第二力觉传感器在协作机器人受到冲击时采集到等同的力觉信息,进而提高判断的准确度。
77.在一种较优的实施例中,如图5所示步骤s4包括:
78.步骤s4:判断实际力度数据是否大于一碰撞力度阈值;
79.若是,表明协作机器人发生了碰撞,停止协作机器人;
80.若否,表明协作机器人未发生碰撞。
81.具体地,针对现有技术中的协作机器人,在工作过程中会因为工件接触导致力觉传感器误判,进而使得碰撞检测功能无法正常工作的问题,本实施例中,通过在上述过程中判断补偿后的实际力度数据是否大于一碰撞力度阈值,从而有效判断出协作机器人是否发生了碰撞,进而提高了协作机器人的安全性。
82.一种协作机器人,用于实施上述的协作机器人控制方法,如图6所示,包括:
83.机器人主体1,机器人主体1上设置有一机械臂11;
84.机械臂11的自由端用于安装第一物体;
85.自由端上设置有第一力觉传感器2;
86.机器人主体1上还设置有第二力觉传感器3;
87.还包括一控制器4,控制器4分别连接第一力觉传感器2和第二力觉传感器3。
88.具体地,针对现有技术中的协作机器人,在工作过程中会因为工件接触导致力觉传感器误判,进而使得碰撞检测功能无法正常工作的问题,本实施例中,通过在机械臂11上设置第一力觉传感器2,从而实现了对协作机器人的机械臂11的受力信息的采集,进而可根据第一力觉传感器2采集到的数据对第二力觉传感器3进行补偿,从而获取到实际力度数据,进而判断协作机器人是否发生了碰撞。
89.在一种较优的实施例中,控制器4内包括:
90.第一采集子模块41,第一采集子模块41连接第一力觉传感器2,第一采集子模块41获取第一力觉传感器2上的第一力度数据;
91.第二采集子模块42,第二采集子模块42连接第二力觉传感器3,第二采集子模块42获取第二力觉传感器3上的第二力度数据;
92.坐标系设定子模块43,坐标系设定子模块43连接机械臂1,坐标系设定子模块根据第一物体构建工具坐标系;
93.补偿子模块44,补偿子模块44连接第一采集子模块41,第二采集子模块42和坐标系设定子模块43,补偿子模块44根据工具坐标系采用第一力度数据对第二力度数据进行补偿,从而生成实际力度数据;
94.碰撞报警子模块45,碰撞报警子模块45连接补偿子模块44,碰撞报警子模块45根据实际力度数据判断协作机器人是否发生碰撞。
95.具体地,针对现有技术中的协作机器人,在工作过程中会因为工件接触导致力觉传感器误判,进而使得碰撞检测功能无法正常工作的问题,本实施例中,通过设置第一采集子模块41和第二采集子模块42,分别接收第一力度数据和第二力度数据,从而实现了对机械臂11上的受力信息以及机器人主体的受力信息的同时采集,进而准确地生成实际力度数据,以判断当前机器人是否受到了碰撞。
96.在一种较优的实施例中,机器人主体1和机械臂11上分别设置有多个第二力觉传
感器3;
97.机械臂11的关节内部设置有第二力觉传感器3;
98.机器人主体1上分布有多个第二力觉传感器3。
99.具体地,为实现对碰撞情况较好的识别效果,本实施例中,通过在机器人主体上分布多个第二力觉传感器3,以分别采集机器人主体上各部位的受力信息,从而准确判断出机器人受到冲击的部位,进而可根据受冲击部位选择机器人的回避方向。
100.在一种较优的实施例中,控制器设置在一控制柜中,控制柜中设置有一示教器;
101.示教器连接控制器,以向控制器中输入补偿程序。
102.具体地,为实现对第二力度数据较好的补偿效果,本实施例中,通过设置示教器与控制器连接,从而可以接收到第一力觉传感器和第二力觉传感器回传的力度数据并显示,进而根据相应的数据生成控制指令,以实现对第二力度数据的补偿,同时向协作机器人输入控制指令。
103.本发明的有益效果在于:通过在机械臂的自由端上设置第一力觉传感器,从而采集到第一物体对第二物体进行接触时的反作用力,并根据生成的第一力度数据对第二力觉传感器生成的第二力度数据进行补偿,从而获得真实的、因外界物体碰撞生成的力度数据,有效判断出协作机器人是否发生碰撞,提高了设备安全性。
104.以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1