一种救援机器人的制作方法
1.本实用新型涉及机器人技术领域,尤其涉及一种救援机器人。
背景技术:
2.随着机器人技术的快速发展,救援机器人的应用在人类的生活中也越来越多,经检索,授权公告号为cn105666501b的专利文件公开了一种救援机器人,包括平移架、三爪式可变径驱动轮、卷筒、第一伺服电机等,所述的三爪式可变径驱动轮包括旋转架、卡爪、球铰支架、双球头拉杆、滑动套筒、花键轴,所述的旋转架由中间的圆盘和均匀设在圆盘外围的3个铰接支架构成,所述的旋转架固定在花键轴的端部,所述的卡爪为弯曲月牙状,该发明其利用三爪式可变径驱动轮、自冷却系统、全封闭救生舱等新技术,具有较强的楼梯攀爬能力,可以经受住火灾现场产生的高温。
3.但上述设计还存在不足之处,上述设计中视屏采集设备只能采集正前方,当需要对左右方向进行采集时,需要通过整体移动救援机器人,而转动机器人比较麻烦,存在着不便于对视屏采集设备进行转动调节的问题,因此我们提出了一种救援机器人用于解决上述问题。
技术实现要素:
4.本实用新型的目的是为了解决现有技术中存在不便于对视屏采集设备进行转动调节的缺点,而提出的一种救援机器人。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种救援机器人,包括机器人本体和位于机器人本体一侧的摄像机,所述机器人本体的一侧固定安装有放置板,放置板上固定安装有透明保护罩,放置板的顶部转动安装有转动杆,转动杆的顶端固定安装有转动板,转动板的顶部固定安装有两个对称设置的竖杆,且摄像机转动安装在两个竖杆内,转动杆上固定套设有第一齿轮,放置板的顶部固定安装有减速电机,减速电机的输出轴上固定安装有第二齿轮,且第二齿轮与对应的第一齿轮相啮合,转动板的顶部开设有第一槽,第一槽内滑动安装有移动座,移动座的顶部铰接有推杆的一端,推杆的另一端铰接在对应的摄像机上,转动板的一侧固定安装有电动推杆,且电动推杆的输出轴延伸至第一槽内并固定安装在移动座上。
7.优选的,所述转动板的一侧内壁上固定安装有安装板,安装板上开设有多个螺纹槽,电动推杆上设有多个螺栓,且螺栓与对应的螺纹槽相啮合,通过螺栓能够对电动推杆进行固定安装。
8.优选的,所述第一槽的两侧内壁上均开设有限位槽,移动座的两侧内壁上均固定安装有限位座,且限位座与对应的限位槽滑动连接,由于设置有限位座和限位槽,能够使得移动座进行稳定的移动。
9.优选的,两个竖杆相互靠近的一侧转动安装有同一个旋转杆,摄像机的底部固定安装有转动座,且转动座固定套设在旋转杆上,通过转动座和旋转杆能够使得摄像机转动
安装在两个竖杆之间。
10.优选的,所述放置板上开设有转动孔,且转动杆上固定套设有轴承,且轴承的外圈固定安装在转动孔内,通过轴承,能够使得转动杆进行稳定的转动。
11.优选的,所述放置板的顶部开设有多个螺钉孔,螺钉孔内螺纹安装有紧固螺钉,透明保护罩的底部开设有多个螺钉槽,且紧固螺钉与对应的螺钉槽相适配。
12.本实用新型中,所述一种救援机器人在机器人本体在救援时,通过摄像机能够对现场进行拍摄,从而能够提高救援效率,而在救援过程中,当对机器人本体的侧面进行拍摄时,通过启动减速电机,减速电机通过输出轴带动第二齿轮进行转动,第二齿轮能够带动第一齿轮进行转动,第一齿轮能够带动转动杆进行转动,转动杆通过转动板和竖杆能够带动摄像机进行水平上方上进行转动,从而能够对机器人本体的侧面进行拍摄,提高救援效率;
13.通过启动电动推杆,电动推杆通过输出轴能够带动移动座进行移动,移动座能够带动推杆进行移动,推杆能够带动摄像机进行转动,且摄像机能够带动转动座和旋转杆进行转动,从而能够对摄像机在竖直方向上进行调节,能够对现场进行全面的拍摄,从而提高救援的效率。
14.本实用新型设计合理,通过对摄像机在竖直方向上和水平方向上进行调节,从而能够对现场进行全面的拍摄,从而提高救援的效率。
附图说明
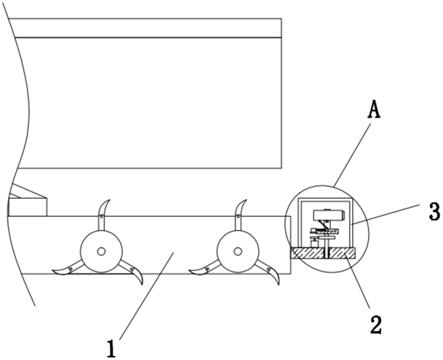
15.图1为本实用新型提出的一种救援机器人的结构示意图;
16.图2为本实用新型提出的一种救援机器人的a部分结构示意图;
17.图3为本实用新型提出的一种救援机器人的b部分结构示意图。
18.图中:1、机器人本体;2、放置板;3、透明保护罩;4、转动杆;5、转动板;6、竖杆;7、摄像机;8、第一齿轮;9、减速电机;10、第二齿轮;11、旋转杆;12、转动座;13、第一槽;14、移动座;15、推杆;16、安装板;17、电动推杆。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
20.参照图1-3,一种救援机器人,包括机器人本体1和位于机器人本体1一侧的摄像机7,机器人本体1的一侧固定安装有放置板2,放置板2上固定安装有透明保护罩3,放置板2的顶部转动安装有转动杆4,转动杆4的顶端固定安装有转动板5,转动板5的顶部固定安装有两个对称设置的竖杆6,且摄像机7转动安装在两个竖杆6内,转动杆4上固定套设有第一齿轮8,放置板2的顶部固定安装有减速电机9,减速电机9的输出轴上固定安装有第二齿轮10,且第二齿轮10与对应的第一齿轮8相啮合,转动板5的顶部开设有第一槽13,第一槽13内滑动安装有移动座14,移动座14的顶部铰接有推杆15的一端,推杆15的另一端铰接在对应的摄像机7上,转动板5的一侧固定安装有电动推杆17,且电动推杆17的输出轴延伸至第一槽13内并固定安装在移动座14上。
21.本实用新型中,转动板5的一侧内壁上固定安装有安装板16,安装板16上开设有多
个螺纹槽,电动推杆17上设有多个螺栓,且螺栓与对应的螺纹槽相啮合,通过螺栓能够对电动推杆17进行固定安装。
22.本实用新型中,第一槽13的两侧内壁上均开设有限位槽,移动座14的两侧内壁上均固定安装有限位座,且限位座与对应的限位槽滑动连接,由于设置有限位座和限位槽,能够使得移动座14进行稳定的移动。
23.本实用新型中,两个竖杆6相互靠近的一侧转动安装有同一个旋转杆11,摄像机7的底部固定安装有转动座12,且转动座12固定套设在旋转杆11上,通过转动座12和旋转杆11能够使得摄像机7转动安装在两个竖杆6之间。
24.本实用新型中,放置板2上开设有转动孔,且转动杆4上固定套设有轴承,且轴承的外圈固定安装在转动孔内,通过轴承,能够使得转动杆4进行稳定的转动。
25.本实用新型中,放置板2的顶部开设有多个螺钉孔,螺钉孔内螺纹安装有紧固螺钉,透明保护罩3的底部开设有多个螺钉槽,且紧固螺钉与对应的螺钉槽相适配。
26.本实用新型中,在救援时,通过摄像机7能够对现场进行拍摄,从而能够提高救援效率,而在救援过程中,当对机器人本体1的侧面进行拍摄时,通过启动减速电机9,减速电机9通过输出轴带动第二齿轮10进行转动,第二齿轮10能够带动第一齿轮8进行转动,第一齿轮8能够带动转动杆4进行转动,转动杆4通过转动板5和竖杆6能够带动摄像机7进行水平上方上进行转动,从而能够对机器人本体1的侧面进行拍摄,提高救援效率,通过启动电动推杆17,电动推杆17通过输出轴能够带动移动座14进行移动,移动座14能够带动推杆15进行移动,推杆15能够带动摄像机7进行转动,且摄像机7能够带动转动座12和旋转杆11进行转动,从而能够对摄像机7在竖直方向上进行调节,能够对现场进行全面的拍摄,从而提高救援的效率。
27.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1