一种弹球弹跳演示装置和自动演示系统的制作方法
1.本发明涉及弹球弹跳技术领域,尤其涉及一种弹球弹跳演示装置和自动演示系统。
背景技术:
2.科学普及,是指利用各种传媒以浅显的、让公众易于理解、接受和参与的方式向普通大众介绍自然科学和社会科学知识、推广科学技术的应用、倡导科学方法、传播科学思想、弘扬科学精神的活动。如何以更直观的、更易与理解的方式向观众展现身边的科普知识,一直是科普行业精益求精的追求。
3.目前自动控制板球演示装置被广泛用于科普展示,其通过球在平面上做平衡运动,该机构通过检查球在平面上的位置调整平面的倾斜角度,进而可以实现球在平面上任意运动。这种演示装置力求通过自动控制球体在平面上平衡,吸引参与者观察,探究装置的科学原理。但是,这种演示力求保证球体处于平衡静止状态,长期演示不够新颖,无法引起参与者参与体验兴趣。
技术实现要素:
4.为解决背景技术中存在的技术问题,本发明提出一种弹球弹跳演示装置和自动演示系统。
5.本发明提出的一种弹球弹跳演示装置,包括:支撑架、击打平台、多个升降单元和弹球;
6.多个升降单元安装在支撑架上且沿圆周分布,击打平台边缘通过多个升降单元支撑在支撑架上方;弹球位于击打平台上,多个升降单元用于分别驱动击打平台边缘升降,以使得击打平台以预设姿态击打弹球。
7.优选地,击打平台边缘设有沿圆周分布的多个安装座,升降单元包括驱动机构、下横杆、竖直连杆和上转座,上转座可转动安装在安装座上,竖直连杆两端分别设有沿击打平台切向延伸的上转轴和下转轴,竖直连杆两端分别通过上转轴和下转轴与上转座和下横杆可转动连接,驱动机构与下横杆远离竖直连杆一端连接用于驱动下横杆竖直摆动,以通过竖直连杆带动安装座升降。
8.优选地,驱动机构采用驱动电机,驱动电机的输出轴平行于上转轴布置且与下横杆远离竖直连杆一端固定连接。
9.优选地,击打平台边缘设有四个安装座,且相对布置的两个安装座的上转座的轴向位于同一直线上,且相邻两个安装座的上转座的轴向垂直设置。
10.优选地,击打平台采用透明平板制成。
11.优选地,击打平台顶部具有击打平面和围绕所述击打平面边缘延伸的限位凸起。
12.优选地,所述击打平面具有正多边形结构。
13.本发明中,所提出的弹球弹跳演示装置,多个升降单元安装在支撑架上且沿圆周
分布,击打平台边缘通过多个升降单元支撑在支撑架上方;弹球位于击打平台上,多个升降单元用于分别驱动击打平台边缘升降,以使得击打平台以预设姿态击打弹球。通过上述优化设计的弹球弹跳演示装置,通过多个升降单元分别驱动击打平台边缘升降,实现击打平台击打角度和击打频率的调整,从而在弹球下落时对弹球进行准确击打,使其能够连续弹跳,进而更好地吸引参与者观察探究,实现科普目的。
14.本发明还提出一种弹球弹跳自动演示系统,包括弹球检测装置和上述的弹球弹跳演示装置,弹球检测装置用于检测弹球位置。
15.优选地,弹球检测装置位于击打平台下方。
16.优选地,还包括控制器,控制器根据弹球检测装置的检测结果,控制至少一个升降单元升降,以使得击打平台根据弹球下落位置以预设角度击打弹球。
17.本发明中,所提出的弹球弹跳自动演示系统,其技术效果与上述弹球弹跳演示装置类似,因此不再赘述。
附图说明
18.图1为本发明提出的一种弹球弹跳演示装置的一个结构示意图。
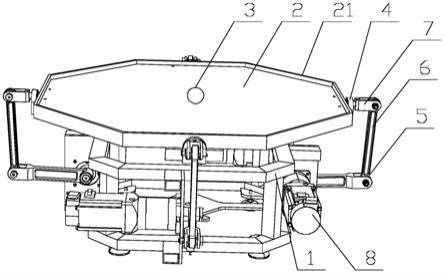
19.图2为本发明提出的一种弹球弹跳演示装置的另一结构示意图。
20.图3为本发明提出的一种弹球弹跳自动演示系统的局部结构示意图。
21.图4为本实施例中r通道图像示意图。
22.图5为本实施例中g通道图像示意图。
23.图6为本实施例中b通道图像示意图。
24.图7为本实施例中灰度图像示意图。
具体实施方式
25.如图1至3所示,图1为本发明提出的一种弹球弹跳演示装置的结构示意图,图2为本发明提出的一种弹球弹跳演示装置的另一结构示意图,图3为本发明提出的一种弹球弹跳自动演示系统的局部结构示意图。
26.参照图1和2,本发明提出的一种弹球弹跳演示装置,包括:支撑架1、击打平台2、多个升降单元和弹球3;
27.多个升降单元安装在支撑架1上且沿圆周分布,击打平台2边缘通过多个升降单元支撑在支撑架1上方;弹球3位于击打平台2上,多个升降单元用于分别驱动击打平台2边缘升降,以使得击打平台2以预设姿态击打弹球3。
28.本实施例的弹球弹跳演示装置的具体工作过程中,首先将弹球放置在击打平台上,初始状态下,多个升降单元同时驱动击打平台升降,使得击打平台震动,将弹球从击打平台上方颠起,弹球下落到击打平台上再次反弹,当弹球下落位置发生偏移时,通过击打平台根据弹球下落角度,通过升降单元驱动击打平台边缘升降,调节击打平台的击打角度,从而实现对弹球轨迹的调整,进而实现弹球在平台上的连续弹跳。
29.在本实施例中,所提出的弹球弹跳演示装置和自动演示系统,多个升降单元安装在支撑架上且沿圆周分布,击打平台边缘通过多个升降单元支撑在支撑架上方;弹球位于击打平台上,多个升降单元用于分别驱动击打平台边缘升降,以使得击打平台以预设姿态
击打弹球。通过上述优化设计的弹球弹跳演示装置,通过多个升降单元分别驱动击打平台边缘升降,实现击打平台击打角度和击打频率的调整,从而在弹球下落时对弹球进行准确击打,使其能够连续弹跳,进而更好地吸引参与者观察探究,实现科普目的。
30.在升降单元的具体实施方式中,击打平台2边缘设有沿圆周分布的多个安装座4,升降单元包括驱动机构、下横杆5、竖直连杆6和上转座7,上转座7可转动安装在安装座4上,竖直连杆6两端分别设有沿击打平台2切向延伸的上转轴和下转轴,竖直连杆6两端分别通过上转轴和下转轴与上转座7和下横杆5可转动连接,驱动机构与下横杆5远离竖直连杆6一端连接用于驱动下横杆5竖直摆动,以通过竖直连杆6带动安装座4升降。
31.在升降单元驱动过程中,上升时,升降单元的驱动机构带动下横杆向上摆动,带动竖直连杆上升,从而通过上转座带动与其连接的安装座上升。在此过程中,如多个升降单元升降高度不同,为了使得高度不同的转座与安装座随动,上转座可通过球轴与安装座配合,便于击打平台的倾斜角度变化。
32.此外,为了便于升降单元的具体布置,击打平台2边缘设有四个安装座4,且相对布置的两个安装座4的上转座7的轴向位于同一直线上,且相邻两个安装座4的上转座7的轴向垂直设置;对称设计四个升降单元,调节击打平台的姿态时,相对设置的两个升降单元可分别实现击打平台沿xz和yz方向的倾斜调正,便于后续对驱动机构的控制。
33.在驱动机构的具体设计中,驱动机构采用驱动电机8,驱动电机8的输出轴平行于上转轴布置且与下横杆5远离竖直连杆6一端固定连接;通过控制电机的转动角度,即可控制击打平台的相应调整。
34.参照图3,本实施例还提出一种弹球弹跳自动演示系统,包括弹球检测装置9和上述的弹球3弹跳演示装置,弹球检测装置9用于检测弹球3位置。具体地,还包括控制器,控制器根据弹球检测装置9的检测结果,控制至少一个升降单元升降,以使得击打平台2根据弹球3下落位置以预设角度击打弹球3。
35.在具体控制方式中,首先,通过弹球检测装置获取弹球实时像素坐标,然后基于弹球实时像素坐标调整弹球使其保持在预设位置,接着,当弹球保持在预设位置超过预设时间,启动弹弹球装置的击球板以预设振动频率和预设第一幅度开始振动使弹球弹起;当弹球弹起高度超过预设高度时,确定其弹起的最高高度,根据最高高度计算弹球下落至预设击球面的下落时间;根据弹球实时像素坐标预测弹球的落球点,根据落球点调整击球板的角度;根据下落时间调整击球板的振动频率以预设第二振幅将弹球弹起。
36.在具体结构设计中,击打平台2采用透明平板制成,相应地,弹球检测装置9位于击打平台2下方。在实际设计中,弹球检测装置可采用摄像头,用来获取弹球的位置图像。
37.在演示的过程中,弹球可以采用乒乓球,在碰撞击打平台时能够具有很好的弹跳效果。具体地,可以采用橘色乒乓球,在摄像头获取的图像进行处理时,能够更快从图像中获得弹球位置坐标。
38.此外,在击打平台的具体设计方式中,击打平台2顶部具有击打平面和围绕所述击打平面边缘延伸的限位凸起21,对弹球的弹跳区域进行限位。
39.进一步地,为了使得弹球检测装置检测区域能够覆盖整个击打平面,所述击打平面具有正多边形结构,使得击打平面与弹球检测装置的检测区域相匹配。
40.本实施例的弹球弹跳自动演示系统,在实现自动弹跳控制过程中,包括下列步骤:
41.步骤s1:获取乒乓球实时像素坐标;
42.具体包括:
43.获取乒乓球实时检测图像,进行预处理;
44.对预处理后的图像进行霍夫圆检测获得乒乓球的实时像素坐标。
45.其中预处理步骤具体包括:
46.对乒乓球检测图像进行rgb通道分离,对分离图像进行处理获得灰度图像。
47.具体的,对检测图像进行rgb通道分离获得分离图像,如图4、5、6所示,图4表示r通道图像、图5表示g通道图像、图6表示b通道图像;
48.如图所示,本实施例中,r通道图像中,乒乓球发亮,在b通道图像中,乒乓球发黑,因为乒乓球中红色成分大,而蓝色成分极少。因此本实施例中所示定义灰度图像为gray=r-b,获得灰度图像如图7所示。
49.步骤s2:基于乒乓球实时像素坐标调整乒乓球使其保持在预设位置;
50.具体地,基于pid算法根据乒乓球实时像素坐标确定击球板水平方向和轴向的倾斜角度以保持乒乓球在预设位置。
51.需要说明的是,本实施例中,为了使乒乓球更加稳定,预设位置最好是击球板中心位置。
52.步骤s3:当乒乓球保持在预设位置超过预设时间,启动弹乒乓球装置的击球板以预设振动频率和预设第一振幅开始振动使乒乓球弹起;
53.具体地,当通过pid算法调整乒乓球在预设位置3步骤s未改变后,我们使运动平台以每秒5-10次的频率,上升10cm再下降10cm。在固有频率的连续敲击下,当乒乓球高度超过预设高度要求时,便控制调整振动频率及幅度。
54.步骤s4:当乒乓球弹起高度超过预设高度时,确定其弹起的最高高度,根据最高高度计算乒乓球下落至预设击球面的下落时间;
55.具体地,确定其弹起的最高高度具体包括:
56.获取乒乓球实时检测图像,进行预处理;
57.对预处理后的图像进行霍夫圆检测获得乒乓球的实时像素半径;
58.根据图像检测装置的视场角确定其水平视角值;
59.基于水平视角值和乒乓球的实时像素半径确定乒乓球的实时高度值h,其中:
60.h=r/tan(pixelr/w)*β;
61.其中,r表示乒乓球的实际半径,pixelr表示乒乓球实时像素半径,w表示检测图像高度;β表示水平视角值。
62.根据实时高度值h确定乒乓球弹起的最高高度。
63.具体的,在图像检测装置拍摄乒乓球实时检测图像时,由于乒乓球距离图像检测装置的高度不断变化,导致实时像素半径不断变化,从而确定乒乓球的实时高度值h,进一步确定乒乓球弹起的最高高度。
64.需要说明的是,图像检测装置可以安装在弹乒乓球装置的下方以仰拍视角也可以安装在弹乒乓球装置的下方以俯拍视角;
65.在本实施例汇总,根据最高高度计算乒乓球下落至预设击球面的下落时间具体是
通过公式:下落时间
66.其中h表示最高高度,g表示重力加速度,h表示预设击球面的高度;需要说明的是,最高高度与预设最低高度均是相对于图像检测装置的高度。
67.需要说明的是,本实施例中,击球面是指击球板与乒乓球接触的水平面。
68.步骤s5:根据乒乓球实时像素坐标预测乒乓球的落球点,根据落球点调整击球板的角度;
69.需要说明的是,预测乒乓球的落球点主要是通过快接近于击球面时乒乓球的实时像素坐标确定落球点,调整调整击球板的角度主要是为了使乒乓球的后续落球点保持在击球板范围内以及更优的保持在预设位置,使得乒乓球运动过程更加稳定。
70.步骤s6:根据下落时间调整击球板的振动频率以预设第二振幅将乒乓球弹起。
71.具体地,在本实施例中,当预设第二振幅为10cm时,击球面距离击球板是5cm时,当乒乓球离开平台上升到最高点时,在相机实时追踪下计算出最高高度,以初速度为0的自由落体运动计算球落到击球面需要的时间t,控制器在等待时间t后向上运动10cm将球击起。
72.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1