一种管型母线用自动化焊接机械手的制作方法
1.本实用新型涉及一种管型母线用自动化焊接机械手。
背景技术:
2.自动化焊接机械手是是一种用于焊接的自动化设备,自动化焊接机械手是现在工厂中应用最多的一种自动化生产设备,自动化焊接机械手可以提高焊接质量、提高生产率并把工人从恶劣的作业环境中解放出来,目前市场上存在着各式各样的自动化焊接机械手,但是一些自动化焊接机械手在工作过程中存在一定的问题。
3.例如有的自动化焊接机械手的位置无法进行有效的改变,其改变的只能改变机械臂的工作范围,这样便会导致自动化焊接机械手的工作范围受到一定的局限性,如果一些工件焊接位置无法工作时,还需要对工件进行位置改变,这样会容易造成焊接位置的错位,从而增加焊接后的误差,也就降低了自动化焊接机械手的使用价值;所以我们提出了一种可以灵活调整角度的自动化焊接机械手,以便于解决上述中提出的问题。
技术实现要素:
4.本实用新型的目的是为了解决以上现有技术的不足,提供一种连接方便的一种管型母线用自动化焊接机械手。
5.一种管型母线用自动化焊接机械手,包括工作台,所述的工作台的左右两侧均设有支撑板,左侧的支撑板的右侧的上端设有动力装置,两支撑板之间通过若干个传动杆相连,所述的传动杆贯穿动力装置,传动杆上设有移动装置;工作台的底部设有控制箱,控制箱的内部设有焊接机控制系统;所述的移动装置的底部设有焊接机械手,焊接机械手由顶部连接块、臂关节、大臂、肘关节、小臂、腕关节、手腕、连接块、焊接头依次连接。
6.作为进一步改进,所述的传动杆的数量为4个。
7.作为进一步改进,所述的焊接头为激光焊接头。
8.作为进一步改进,所述的激光焊接头由激光整理腔、聚光镜、扩光器、动态聚焦系统组成。
9.作为进一步改进,所述的焊接机控制系统由输气管、激光器传输光纤、电缆、激光头组成。
10.作为进一步改进,所述的控制箱的底部的四角均设有万向轮。
11.有益效果:
12.本实用新型设有移动装置,可在传动杆上移动,使焊接机械手的工作范围变大,工作精确度增大,从而能够满足工件各处位置的焊接需求,保证了工件的焊接质量,提高装置的使用价值,万向轮的设计可将整个焊接装置移动,应用范围广,便于移动。
附图说明
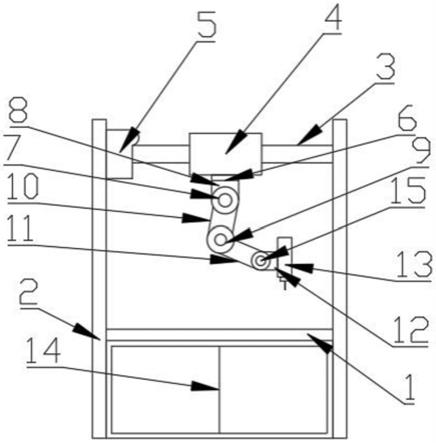
13.图1是一种管型母线用自动化焊接机械手的总体结构示意图;
14.图2自动化焊接机俯视总体结构示意图;
15.1.工作台2.支撑板3.传动杆4.移动装置5.动力装置6.顶部连接块7.臂关节8.大臂9.肘关节10.小臂11.手腕12.连接块13.焊接头14.焊接机控制系统15.腕关节。
具体实施方式
16.为了加深对本实用新型的理解,下面将结合实施例和附图对本实用新型作进一步详述,该实施例仅用于解释本实用新型,并不构成对本实用新型保护范围的限定。
17.如图1所示,一种管型母线用自动化焊接机械手,包括工作台1、支撑板2、传动杆3、移动装置4、动力装置5、顶部连接块6、臂关节7、大臂8、肘关节9、小臂10、手腕11、连接块12、焊接头13、焊接机控制系统14、腕关节15。
18.一种管型母线用自动化焊接机械手,包括工作台1,所述的工作台1的左右两侧均设有支撑板2,左侧的支撑板2的右侧的上端设有动力装置5,两支撑板2之间通过若干个传动杆3相连,传动杆3的数量为4个,所述的传动杆3贯穿动力装置5,传动杆3上设有移动装置4;工作台1的底部设有控制箱,控制箱的内部设有焊接机控制系统14,焊接机控制系统14由输气管、激光器传输光纤、电缆、激光头组成;所述的移动装置4的底部设有焊接机械手,焊接机械手由顶部连接块6、臂关节7、大臂8、肘关节9、小臂10、腕关节15、手腕11、连接块12、焊接头13依次连接,焊接头为激光焊接头,激光焊接头由激光整理腔、聚光镜、扩光器、动态聚焦系统组成;控制箱的底部的四角均设有万向轮。
19.使用时,启动动力装置,带动移动装置移动,同时焊接机械手随移动装置位置的移动改变焊接机械手的位置,将母线放在工作台上进行焊接,焊接头通过焊接机控制系统控制焊接的位置,工作时的运动范围更大,万向轮可像任何方向移动,也可固定不动。
20.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种管型母线用自动化焊接机械手,其特征在于,包括工作台,所述的工作台的左右两侧均设有支撑板,左侧的支撑板的右侧的上端设有动力装置,两支撑板之间通过若干个传动杆相连,所述的传动杆贯穿动力装置,传动杆上设有移动装置;工作台的底部设有控制箱,控制箱的内部设有焊接机控制系统;所述的移动装置的底部设有焊接机械手,焊接机械手由顶部连接块、臂关节、大臂、肘关节、小臂、腕关节、手腕、连接块、焊接头依次连接。2.根据权利要求1所述的一种管型母线用自动化焊接机械手,其特征在于,所述的传动杆的数量为4个。3.根据权利要求1所述的一种管型母线用自动化焊接机械手,其特征在于,所述的焊接头为激光焊接头。4.根据权利要求3所述的一种管型母线用自动化焊接机械手,其特征在于,所述的激光焊接头由激光整理腔、聚光镜、扩光器、动态聚焦系统组成。5.根据权利要求1所述的一种管型母线用自动化焊接机械手,其特征在于,所述的焊接机控制系统由输气管、激光器传输光纤、电缆、激光头组成。6.根据权利要求1所述的一种管型母线用自动化焊接机械手,其特征在于,所述的控制箱的底部的四角均设有万向轮。
技术总结
本实用新型公开了一种管型母线用自动化焊接机械手,包括工作台,所述的工作台的左右两侧均设有支撑板,左侧的支撑板的右侧的上端设有动力装置,两支撑板之间通过若干个传动杆相连,传动杆贯穿动力装置,传动杆上设有移动装置;工作台的底部设有控制箱,控制箱的内部设有焊接机控制系统,移动装置的底部设有焊接机械手,焊接机械手由顶部连接块、臂关节、大臂、肘关节、小臂、腕关节、手腕、连接块、焊接头依次连接,本实用新型设有移动装置,可在传动杆上移动,使焊接机械手的工作范围变大,从而能够满足工件各处位置的焊接需求,保证了工件的焊接质量,提高装置的使用价值,万向轮可将整个焊接装置移动,便于移动。便于移动。便于移动。
技术研发人员:陈致辛
受保护的技术使用者:江苏华雄电气有限公司
技术研发日:2020.12.31
技术公布日:2022/1/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1