金相切片的全自动研磨机的制作方法
1.本实用新型涉及金相切片研磨的技术领域,尤其涉及一种金相切片的全自动研磨机。
背景技术:
2.现有技术中可以通过对金相切片进行研磨抛光来观察样品截面组织结构情况。
3.现有技术中的金相切片进行铜孔研磨时由人工操作对已灌胶的金相切片进行烦琐的研磨,效率、合格率以及可靠性低。而且采用工人肉眼进行检测的作业方式,导致操作成本大,而且人工识别效率低下,也容易导致工人的用眼卫生以及视力受损的问题,并且伴有企业的招工难和人员不稳定、新工学习期长等诸多不利因素。
4.综上可知,现有的金相切片研磨的技术在实际使用上,显然存在不便与缺陷,所以有必要加以改进。
技术实现要素:
5.针对上述的缺陷,本实用新型的目的在于提供一种金相切片的全自动研磨机,自动对金相切片进行研磨,大大提升了单位时间内的金相切片研磨产出,并且合格率以及可靠性高。
6.为了实现上述目的,本实用新型提供了一种金相切片的全自动研磨机1000,包括:
7.机架单元100,包括上机架1以及下机架2,所述上机架1设置在所述下机架2的上方;
8.对位以及给料单元200,其设置在所述下机架2上;所述对位以及给料单元200包括基板6、给料模块、对位模块、旋转矫正模块以及第一升降模块;所述给料模块、对位模块、旋转矫正模块以及第一升降模块设置在基板6上;所述给料模块包括用于装载所述金相切片14的装料装置以及推料装置,所述推料装置与所述装料装置联动连接以驱动所述金相切片14移动至第一待抓取位置;所述旋转矫正模块包括第一抓取装置以及旋转装置,所述旋转装置与所述第一抓取装置连接;所述第一升降模块与所述旋转矫正模块联动连接,所述第一升降模块驱动所述第一抓取装置移动至所述第一待抓取位置以抓取所述金相切片14;所述对位模块包括ccd装置,所述ccd装置检测位于检测位置的金相切片14,并将所述金相切片14的需研磨位置的数据信息发送至控制器;通过所述第一升降模块驱动所述第一抓取装置上的金相切片14移动至所述检测位置;通过所述第一升降模块驱动所述第一抓取装置上的所述金相切片14移动至第二待抓取位置;
9.竖直抓取单元300,其设置在水平驱动单元400上;所述竖直抓取单元300包括取料抓紧模块以及第二升降模块;所述取料抓紧模块包括第二抓取装置;所述第二升降模块与所述取料抓紧模块联动连接;通过所述水平驱动单元400带动所述竖直抓取单元300沿水平方向移动至第一水平位置,所述第二升降模块驱动所述取料抓紧模块升降至第二待抓取位置抓取所述金相切片14;
10.水平驱动单元400,其设置在所述上机架1上;水平驱动单元400包括水平移动模块以及第一驱动模块,所述第一驱动模块与所述水平移动模块联动连接以驱动所述水平移动模块沿水平方向移动;
11.研磨单元500,其设置在所述下机架2上;包括研磨模块以及第二驱动模块;所述第二驱动模块驱动所述研磨模块转动;通过所述水平驱动单元400带动所述竖直抓取单元300沿水平方向移动至第二水平位置,所述第二升降模块驱动所述取料抓紧模块升降至所述研磨模块以放入所述金相切片14进行研磨;
12.控制器,所述控制器分别与所述对位以及给料单元200、竖直抓取单元300、水平驱动单元400以及研磨单元500通信连接,向所述机架单元100、对位以及给料单元200、竖直抓取单元300、水平驱动单元400以及研磨单元500发送预设的控制指令,控制所述机架单元100、对位以及给料单元200、竖直抓取单元300、水平驱动单元400以及研磨单元500执行相应的操作。
13.根据所述的金相切片的全自动研磨机1000,对位以及给料单元200的给料模块还包括支撑装置,所述支撑装置包括:
14.两个竖直设置的支撑侧板7,分别设置于所述基板6的左右两侧;
15.滑道托板8,其左右两端分别与两个所述支撑侧板7连接;
16.两个滑道座9,分别设置于所述滑道托板8的左右两侧;
17.两个移动滑轨13,分别可移动设置于两个所述滑道座9上;
18.所述给料模块的所述装料装置包括:
19.装料卡槽12,其左右两端分别与两个所述移动滑轨13连接;
20.给料托板16,连接于所述装料卡槽12的前端,包括底板和前挡板,所述前挡板竖直设置于所述底板的前端;
21.装料拔把11,设置于所述装料卡槽12内;
22.推料器10,设置于所述装料卡槽12内;
23.所述装料卡槽12、给料托板16以及推料器10构成用于容纳所述金相切片14的给料腔;
24.所述给料模块的所述推料装置包括:
25.第一气缸15,所述第一气缸15的推杆端通过气缸销轴与给料托板16连接;所述第一气缸15设置在所述滑道托板8上。
26.根据所述的金相切片的全自动研磨机1000,所述旋转矫正模块的所述旋转装置包括:
27.第一电机架23;
28.第一电机22,设置于所述第一电机架23上;
29.第一轴承座26,设置于所述第一电机架23上;
30.旋转轴25,安装于所述第一轴承座26;
31.第一联轴器24,将旋转轴25与第一电机22联动连接;
32.所述旋转矫正模块的所述第一抓取装置包括:
33.气缸连接座27,其一端与所述旋转轴25的输出端联动连接,另一端与第一气缸气爪28连接;
34.第一气缸气爪28,所述第一气缸气爪28上包括第一气爪夹具29;
35.所述旋转矫正模块还包括旋转感应装置,所述旋转感应装置包括:
36.旋转感应片30,设置于所述气缸连接座27上;
37.旋转感应器31,设置于所述第一轴承座26的外表面上。
38.根据所述的金相切片的全自动研磨机1000,所述第一升降模块包括:
39.第一电机座34,设置在所述基板6上;
40.第二电机32,安装在所述第一电机座34上;
41.第一滚珠丝杠组合35,包括竖直设置的第一丝杆以及套设在所述第一丝杆上的第一丝杆螺母;
42.第二联轴器33,将所述第二电机32与所述第一丝杆联动连接;
43.联接法兰36,其一侧联接所述丝杆螺母,另一侧联接所述第一电机架23;
44.第一升降滑轨组合40,包括第一滑轨座39、竖直设置的第一滑轨以及第一滑块;所述第一滑轨设置于所述第一滑轨座39上,所述第一滑块可移动设置于所述第一滑轨上;所述联接法兰36连接所述第一滑块;
45.第二轴承座41,连接于所述第一滑轨座39的顶端;所述丝杆的顶端安装于所述第二轴承座41内;
46.升降感应器座37,安装于所述第一滑轨座39上;
47.升降感应器38,安装于所述升降感应器座37上。
48.根据所述的金相切片的全自动研磨机1000,所述对位模块的ccd装置包括:
49.ccd固定座17,其安装于所述基板6上;
50.ccd相机18,固定于所述ccd固定座17上;
51.镜筒19,连接于所述ccd相机18;
52.光源20,设置于所述镜筒19的前端的外圈;
53.吹气管21,设置于滑道托板8的下方,并且位于所述光源20上方。
54.根据所述的金相切片的全自动研磨机1000,所述竖直抓取单元300的第二升降模块包括:
55.底座44;
56.第三轴承座46,连接于所述底座44的上端;
57.第二电机座43,连接于所述第三轴承座46的上方;
58.第三电机42,设置于所述第二电机座43的上方;
59.第二滚珠丝杆组合47,包括竖直设置的第二丝杆以及可移动套设在所述第二丝杆外侧的第二丝杆螺母;所述第二丝杆的顶端安装于所述第三轴承座46上,其底端安装于第四轴承座52上;
60.第四轴承座52连接于所述底座44的下端;
61.第三联轴器45,分别连接所述第二丝杆的输入端以及所述第三电机;
62.第二升降滑轨组合,包括竖直设置的第二滑轨51以及第二滑块50;所述第二滑轨51安装于所述底座44上,所述第二滑块50可移动设置于所述第二滑轨51;
63.滑板48,其一端连接于所述第二丝杆螺母,另一端连接于所述第三滑块49;
64.第三滑块49,其连接所述滑板48以及第二滑块50;
65.所述竖直抓取单元300的所述取料抓紧模块安装于所述第三滑块49上;
66.所述取料抓紧模块包括:
67.第二滑轨座55,设置于所述第三滑块49上;
68.两个第三滑轨56,竖直设置于所述第二滑轨座55上;
69.两个第四滑块57,分别可移动设置于两个所述第三滑轨56上;
70.两个取料气缸座58,分别设置于两个所述第四滑块57上;
71.两个第二气缸气爪59,分别设置于两个所述取料气缸座58,第二气缸气爪59上设置有第二气爪夹具62;
72.两个缓冲导柱60,分别连接于所述取料气缸座58上;
73.两个缓冲弹簧61,分别竖直套设于两个所述缓冲导柱60上;
74.所述竖直抓取单元300还包括用于控制所述第二升降模块的行程位置的第一感应装置,所述第一感应装置包括:
75.第一感应片53,设置于所述滑板48上;
76.第一感应器54,设置于所述底座44上。
77.根据所述的金相切片的全自动研磨机1000,所述水平驱动单元400的所述第一驱动模块包括:
78.水平底座64,设置于所述上机架1上;
79.第三电机座65,其设置于所述水平底座64;
80.第四电机63,设置于所述第三电机座65上;
81.所述水平驱动单元400的所述水平移动模块包括:
82.第三滚珠丝杆组合68,包括水平设置的第三丝杆以及可移动套设在所述第三丝杆外侧的第三丝杆螺母;所述第三丝杆的一端安装于第五轴承座67上,另一端安装于第六轴承座73上;
83.第四联轴器66,分别连接所述第三丝杆的输入端以及所述第四电机;
84.水平导轨组合,包括水平设置的水平滑轨70以及水平滑块69;所述水平滑轨70设置于所述水平底座64;
85.移动块71,其一端连接于所述第三丝杆螺母,另一端连接于所述水平滑块69;
86.连接板72,连接于所述移动块71上;所述竖直抓取单元300安装于所述连接板72上;
87.托链槽76,设置于所述水平底座64;
88.托链77,其一端设置于所述托链槽76内,另一端连接所述竖直抓取单元300的底座44;
89.所述水平驱动单元400还包括用于控制所述水平移动模块的行程位置的第二感应装置,所述第二感应装置包括:
90.第二感应片75,设置于所述移动块71上;
91.第二感应器74,设置于所述水平底座64上。
92.根据所述的金相切片的全自动研磨机1000,所述研磨单元500的所述研磨模块包括粗磨装置、中磨装置、细磨装置及研磨装置;所述第二驱动模块包括用于驱动所述粗磨装置的第一驱动装置、用于驱动所述中磨装置的第二驱动装置、用于驱动所述细磨装置的第
三驱动装置、用于驱动所述研磨装置的第四驱动装置;
93.所述粗磨装置包括粗目金刚砂磨盘85;
94.所述中磨装置包括中目金刚砂磨盘89;
95.所述细磨装置包括细目金刚砂磨盘90;
96.所述研磨装置包括超细目金刚砂磨盘91;
97.所述第一驱动装置包括:
98.电机法兰座81,包括上法兰以及下法兰,上法兰位于下法兰的上方,所述上法兰安装于所述机架单元100的所述下机架2上;
99.第五电机80,安装于所述下法兰;
100.第七轴承座83,连接于所述电机法兰座81的上方;
101.法兰轴84,设置于所述第七轴承座83内;
102.第五联轴器82,其一端与所述法兰轴84连接,另一端与所述第五电机80连接;
103.所述法兰轴84与所述粗目金刚砂磨盘85联动连接;
104.所述研磨单元500还包括第一排水模块,所述第一排水模块包括:
105.底面槽78,所述粗磨装置、中磨装置、细磨装置及研磨装置设置于所述底面槽78内;
106.第一排水管组79,连接于所述底面槽78底部;
107.所述研磨单元500还包括第二排水模块,所述第二排水模块包括:
108.用于排出所述粗磨装置的液体的第一排水装置、用于排出所述中磨装置的液体的第二排水装置、用于排出所述细磨装置的液体的第三排水装置、用于排出所述研磨装置的液体的第四排水装置;
109.所述第一排水装置包括:
110.接水槽86,其环绕所述粗磨装置设置,安装于所述机架单元100的所述下机架2上;
111.第二排水管组88,连接于所述接水槽86的底部;
112.所述第四排水装置包括:
113.接液槽92,其环绕所述研磨装置设置,安装于所述机架单元100的所述下机架2上;
114.排液管组94,连接于所述接液槽92的底部;
115.磨液箱5,与所述排液管组94连通连接;
116.所述研磨单元500还包括给水模块,所述给水模块包括用于向粗磨装置供水的第一供水装置、用于向中磨装置供水的第二供水装置、用于向细磨装置供水的第三供水装置及用于向研磨装置供水的第四供水装置;所述第一供水装置、第二供水装置、第三供水装置以及第四供水装置设置在所述底面槽78上;
117.所述第一供水装置为给水阀组87;
118.所述第四供水装置包括给液阀组93、电动吸液泵,所述电动吸液泵分别与所述给液阀组93以及所述磨液箱5连通连接。
119.根据所述的金相切片的全自动研磨机1000,所述全自动研磨机1000还包括触摸操控面板单元600,其与所述控制器通信连接,所述触摸操控面板单元600包括:
120.显示屏座板97,设置于所述上机架1;
121.触摸显示屏98,设置于所述显示屏座板97上;
122.电源显示灯99,设置于所述显示屏座板97上;
123.急停开关101,设置于所述显示屏座板97上;
124.操作系统,与所述触摸显示屏98通信连接,接收所述触摸显示屏98的第一信息并发送至所述控制器,以及根据所述控制器发送的第二信息控制所述触摸显示屏98的显示信息。
125.根据所述的金相切片的全自动研磨机1000,所述全自动研磨机1000还包括成品收料盒95,设置于所述下机架2上;
126.所述下机架为储物及安装台,所述下机架的储物腔内安装有电控箱3,通过在储物腔上设置门盖4进行开合。
127.本实用新型的金相切片的全自动研磨机1000通过机架单元100安装对位以及给料单元200、竖直抓取单元300、水平驱动单元400、研磨单元500以及控制器等,使得各个单元可以根据操作过程的需求各自安装在相应的位置。研磨程序开始时,首先可以通过对位以及给料单元200的给料模块将金相切片14移动至第一待抓取位置等待抓取,旋转矫正模块配合第一升降模块抓取金相切片14并将抓取的金相切片14移动至检测位置,对位模块对金相切片14进行检测并返回数据至所述控制器,所述数据可以用于后续金相切片14的研磨过程;然后,竖直抓取单元300配合水平驱动单元400抓取检测完毕的金相切片14并移动至研磨单元500进行研磨,完成研磨工序,整个过程由全自动研磨机1000自动化智能操作。借此,本实用新型的全自动研磨机1000实现了自动对金相切片进行研磨,大大提升了单位时间内的金相切片研磨产出,并且合格率以及可靠性高。
附图说明
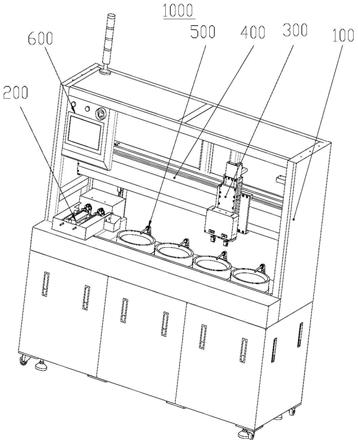
128.图1是本实用新型实施例提供的全自动研磨机的结构示意图;
129.图2是本实用新型实施例提供的全自动研磨机的机架单元的结构示意图;
130.图3是本实用新型实施例提供的全自动研磨机的对位以及给料单元的结构示意图;
131.图4a是本实用新型实施例提供的全自动研磨机的竖直抓取单元的左视图;
132.图4b是本实用新型实施例提供的全自动研磨机的竖直抓取单元的主视图;
133.图5a是本实用新型实施例提供的全自动研磨机的水平驱动单元的俯视图;
134.图5b是本实用新型实施例提供的全自动研磨机的水平驱动单元的主视图;
135.图6a是本实用新型实施例提供的全自动研磨机的研磨单元的主视图;
136.图6b是本实用新型实施例提供的全自动研磨机的研磨单元的俯视图;
137.图7是本实用新型实施例提供的全自动研磨机的触摸操控面板单元的结构示意图。
具体实施方式
138.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
139.参见图1~图7,在本实用新型的第一实施例中提供了一种金相切片的全自动研磨
机1000,包括:
140.机架单元100,包括上机架1以及下机架2,所述上机架1设置在所述下机架2的上方;
141.对位以及给料单元200,其设置在所述下机架2上;所述对位以及给料单元200包括基板6、给料模块、对位模块、旋转矫正模块以及第一升降模块;所述给料模块、对位模块、旋转矫正模块以及第一升降模块设置在基板6上;所述给料模块包括用于装载所述金相切片14的装料装置以及推料装置,所述推料装置与所述装料装置联动连接以驱动所述金相切片14移动至第一待抓取位置;所述旋转矫正模块包括第一抓取装置以及旋转装置,所述旋转装置与所述第一抓取装置连接;所述第一升降模块与所述旋转矫正模块联动连接,所述第一升降模块驱动所述第一抓取装置移动至所述第一待抓取位置以抓取所述金相切片14;所述对位模块包括ccd(charge coupled device camera)装置,所述ccd装置检测位于检测位置的金相切片14,并将所述金相切片14的需研磨位置的数据信息发送至控制器;通过所述第一升降模块驱动所述第一抓取装置上的金相切片14移动至所述检测位置;通过所述第一升降模块驱动所述第一抓取装置上的所述金相切片14移动至第二待抓取位置;
142.竖直抓取单元300,其设置在水平驱动单元400上;所述竖直抓取单元300包括取料抓紧模块以及第二升降模块;所述取料抓紧模块包括第二抓取装置;所述第二升降模块与所述取料抓紧模块联动连接;通过所述水平驱动单元400带动所述竖直抓取单元300沿水平方向移动至第一水平位置,所述第二升降模块驱动所述取料抓紧模块升降至第二待抓取位置抓取所述金相切片14;
143.水平驱动单元400,其设置在所述上机架1上;水平驱动单元400包括水平移动模块以及第一驱动模块,所述第一驱动模块与所述水平移动模块联动连接以驱动所述水平移动模块沿水平方向移动;
144.研磨单元500,其设置在所述下机架2上;包括研磨模块以及第二驱动模块;所述第二驱动模块驱动所述研磨模块转动;通过所述水平驱动单元400带动所述竖直抓取单元300沿水平方向移动至第二水平位置,所述第二升降模块驱动所述取料抓紧模块升降至所述研磨模块以放入所述金相切片14进行研磨;
145.控制器,所述控制器分别与所述对位以及给料单元200、竖直抓取单元300、水平驱动单元400以及研磨单元500通信连接,向所述机架单元100、对位以及给料单元200、竖直抓取单元300、水平驱动单元400以及研磨单元500发送预设的控制指令,控制所述机架单元100、对位以及给料单元200、竖直抓取单元300、水平驱动单元400以及研磨单元500执行相应的操作。
146.在该实施例中,全自动研磨机1000包括机架单元100、对位以及给料单元200、竖直抓取单元300、水平驱动单元400以及研磨单元500,通过机架单元100安装对位以及给料单元200、竖直抓取单元300、水平驱动单元400、研磨单元500以及控制器等,使得各个单元可以根据金相切片的研磨操作过程的需求各自安装在相应的位置。通过对位以及给料单元200、竖直抓取单元300、水平驱动单元400、研磨单元500以及控制器实现自动化完成金相切片14的研磨。研磨程序开始时,首先可以通过对位以及给料单元200的给料模块将金相切片14移动至第一待抓取位置等待抓取,旋转矫正模块配合第一升降模块抓取金相切片14并将抓取的金相切片14移动至检测位置,对位模块对金相切片14进行检测并返回数据至所述控
制器,所述数据可以用于后续金相切片14的研磨过程;然后,竖直抓取单元300配合水平驱动单元400抓取检测完毕的金相切片14并移动至研磨单元500进行研磨,完成研磨工序,整个过程由全自动研磨机1000自动化智能操作,大大提升了单位时间内的金相切片研磨产出,并且合格率以及可靠性高。
147.参见图3,在本实用新型的第二实施例中,对位以及给料单元200的给料模块还包括支撑装置,所述支撑装置包括:
148.两个竖直设置的支撑侧板7,分别设置于所述基板6的左右两侧;
149.滑道托板8,其左右两端分别与两个所述支撑侧板7连接;
150.两个滑道座9,分别设置于所述滑道托板8的左右两侧;
151.两个移动滑轨13,分别可移动设置于两个所述滑道座9上;
152.所述给料模块的所述装料装置包括:
153.装料卡槽12,其左右两端分别与两个所述移动滑轨13连接;
154.给料托板16,连接于所述装料卡槽12的前端,包括底板和前挡板,所述前挡板竖直设置于所述底板的前端;
155.装料拔把11,设置于所述装料卡槽12内;
156.推料器10,设置于所述装料卡槽12内;
157.所述装料卡槽12、给料托板16以及推料器10构成用于容纳所述金相切片14的给料腔;
158.所述给料模块的所述推料装置包括:
159.第一气缸15,所述第一气缸15的推杆端通过气缸销轴与给料托板16连接;所述第一气缸15设置在所述滑道托板8上。
160.在该实施例中,对位以及给料单元200整组安装于下机架2的基座平板上,对位以及给料单元200的给料模块用于装载待研磨的金相切片14,以及将金相切片14移动至第一待抓取位置,以便旋转矫正模块配合第一升降模块进行抓取,带动待研磨的金相切片14进行后续操作;给料模块由支撑侧板7固定在基板6上,滑道托板8安装在两侧的支撑侧板7上,在其上,左右两侧对称安装各一组滑道座9。推料器10与装料拔把11安装在装料卡槽12内部后端,装料卡槽12侧边装配有移动滑轨13并与给料托板16联接成一体,第一气缸15的推杆端与给料托板16用气缸销轴连接,第一气缸15的缸体摆尾端与滑道下托板8连接,金相切片14则整齐排列放入装料卡槽12、给料托板16及推料器10所形成的给料腔内。第一气缸15用于带动整个所述装料装置移动,使得承载于所述装料装置上的待研磨的金相切片14移动至第一待抓取位置;当所述装料装置内的金相切片14被抓取后,可以通过推料器10与装料拔把11的配合使用,推动所述装料装置内剩余的金相切片14向前移动,到达空缺的位置后由装料卡槽12前端的给料托板16进行抵挡,填补已被抓取的金相切片14的位置空缺。
161.参见图3,在本实用新型的第三实施例中,所述旋转矫正模块的所述旋转装置包括:
162.第一电机架23;
163.第一电机22,设置于所述第一电机架23上;
164.第一轴承座26,设置于所述第一电机架23上;
165.旋转轴25,安装于所述第一轴承座26;
166.第一联轴器24,将旋转轴25与第一电机22联动连接;
167.所述旋转矫正模块的所述第一抓取装置包括:
168.气缸连接座27,其一端与所述旋转轴25的输出端联动连接,另一端与第一气缸气爪28连接;
169.第一气缸气爪28,所述第一气缸气爪28上包括第一气爪夹具29;
170.所述旋转矫正模块还包括旋转感应装置,所述旋转感应装置包括:
171.旋转感应片30,设置于所述气缸连接座27上;
172.旋转感应器31,设置于所述第一轴承座26的外表面上。
173.在该实施例中,对位以及给料单元200的所述旋转矫正模块配合第一升降模块用于移动至所述给料模块抓取待加工的金相切片14,以及将待加工的金相切片14移动至对位模块的检测位置,通过对位模块进行检测获取金相切片14后续的研磨数据,进行检测的过程中还可以根据需求通过所述旋转装置旋转所述金相切片14,改变检测角度;具体地,所述旋转矫正模块由第一电机22安装在第一电机架23上,第一电机架23与第一轴承座26联接为一体,旋转轴25通过第一联轴器24与第一电机22联接,并安装在第一轴承座26里,旋转轴25的输出端与气缸连接座27固定联接,第一气缸气爪28安装在气缸连接座27另一端,其输出气爪上装配有第一气爪夹具29,在气缸连接座27上端固定有旋转感应片30,而把旋转感应器31安装在第一轴承座26外侧表面上。
174.参见图3,在本实用新型的第四实施例中,所述第一升降模块包括:
175.第一电机座34,设置在所述基板6上;
176.第二电机32,安装在所述第一电机座34上;
177.第一滚珠丝杠组合35,包括竖直设置的第一丝杆以及套设在所述第一丝杆上的第一丝杆螺母;
178.第二联轴器33,将所述第二电机32与所述第一丝杆联动连接;
179.联接法兰36,其一侧联接所述丝杆螺母,另一侧联接所述第一电机架23;
180.第一升降滑轨组合40,包括第一滑轨座39、竖直设置的第一滑轨以及第一滑块;所述第一滑轨设置于所述第一滑轨座39上,所述第一滑块可移动设置于所述第一滑轨上;所述联接法兰36连接所述第一滑块;
181.第二轴承座41,连接于所述第一滑轨座39的顶端;所述丝杆的顶端安装于所述第二轴承座41内;
182.升降感应器座37,安装于所述第一滑轨座39上;
183.升降感应器38,安装于所述升降感应器座37上。
184.在该实施例中,所述第一升降模块用于带动所述旋转矫正模块移动至预定的位置。具体地,第一升降模块由第二电机32驱动,第二电机32安装在第一电机座34上,而第一电机座34固定在基板6上,第一滚珠丝杆组合35通过第二联轴器33联接来传递第二电机32的旋转扭矩,第一滚珠丝杆组合35的第一丝杆螺母与联接法兰36联接,而联接法兰36固定在第一电机架23上,并与第一升降滑轨组合40的第一滑块联接,第一升降滑轨组合40的第一滑轨安装在第一滑轨座39上,第一滚珠丝杆组合35的顶端安装在第二轴承座41内,在第一滑轨座39上安装升降感应器座37及升降感应器38。
185.参见图3,在本实用新型的第五实施例中,所述对位模块的ccd装置包括:
186.ccd固定座17,其安装于所述基板6上;
187.ccd相机18,固定于所述ccd固定座17上;
188.镜筒19,连接于所述ccd相机18;
189.光源20,设置于所述镜筒19的前端的外圈;
190.吹气管21,设置于滑道托板8的下方,并且位于所述光源20上方。
191.在该实施例中,所述对位模块用于对待加工的所述金相切片14进行检测,获取金相切片14上需研磨位置的数据,该数据用于后续的研磨工序;具体地,所述对位模块由前后两组ccd固定座17固定在基板6上,ccd相机18与镜筒19联接后安装在ccd固定座17上,并确保同心度及直线度,在镜筒19前端外圈安装光源20,吹气管21安装在滑道托板8下方及光源20上方。
192.对位以及给料单元200各模块相互配合的操作过程:
193.全自动研磨机1000启动工作前,在装料卡槽12与给料托板16构成的给料腔内装满金相切片14。启动时,第一气缸15动作,把装料卡槽12与给料托板16沿移动滑轨13向前推出到金相切片的第一待抓取位置(如图3)。到位后,通过第一升降模块在第二电机32的驱动下,第一滚珠丝杆组合35的联接法兰36带动整组所述旋转矫正模块上升至所述金相切片的第一待抓取位置,第一气缸气爪28动作,用第一气爪夹具29夹紧金相切片14的两侧,第一滚珠丝杆组合35再次启动上升使所抓取的金相切片14脱离给料托板16,并避开给料托板16的挡钩(即前挡板)后,第一气缸15启动复位收回,完成了金相切片14的抓取动作;通过数据设定,第一滚珠丝杆组合35下降至金相切片14需研磨位置与对位模块的检测中心位置高度大致相同时(参见图3中的ccd对位中心线),启动对位模块的ccd相机18,同时打开光源20,通过镜筒19获取金相切片14需研磨位置的准确数据并反馈给plc(programmable logic controller,可编程逻辑控制器)系统(即控制器),再对比原有所设定的标准参数,处理后的数据控制并启动所述旋转矫正模块的第一电机22,使第一气缸气爪28上的第一气爪夹具29所夹紧的金相切片14保持水平,并再次获取矫正后的金相切片14需研磨位置的准确数据并反馈给plc系统,此时,完成了金相切片14的矫正工序,并准备进行下道工序的生产。
194.参见图4a、图4b,在本实用新型的第六实施例中,所述竖直抓取单元300的第二升降模块包括:
195.底座44;
196.第三轴承座46,连接于所述底座44的上端;
197.第二电机座43,连接于所述第三轴承座46的上方;
198.第三电机42,设置于所述第二电机座43的上方;
199.第二滚珠丝杆组合47,包括竖直设置的第二丝杆以及可移动套设在所述第二丝杆外侧的第二丝杆螺母;所述第二丝杆的顶端安装于所述第三轴承座46上,其底端安装于第四轴承座52上;
200.第四轴承座52连接于所述底座44的下端;
201.第三联轴器45,分别连接所述第二丝杆的输入端以及所述第三电机;
202.第二升降滑轨组合,包括竖直设置的第二滑轨51以及第二滑块50;所述第二滑轨51安装于所述底座44上,所述第二滑块50可移动设置于所述第二滑轨51;
203.滑板48,其一端连接于所述第二丝杆螺母,另一端连接于所述第三滑块49;
204.第三滑块49,其连接所述滑板48以及第二滑块50;
205.所述竖直抓取单元300的所述取料抓紧模块安装于所述第三滑块49上;
206.所述取料抓紧模块包括:
207.第二滑轨座55,设置于所述第三滑块49上;
208.两个第三滑轨56,竖直设置于所述第二滑轨座55上;
209.两个第四滑块57,分别可移动设置于两个所述第三滑轨56上;
210.两个取料气缸座58,分别设置于两个所述第四滑块57上;
211.两个第二气缸气爪59,分别设置于两个所述取料气缸座58,第二气缸气爪59上设置有第二气爪夹具62;
212.两个缓冲导柱60,分别连接于所述取料气缸座58上;
213.两个缓冲弹簧61,分别竖直套设于两个所述缓冲导柱60上;
214.所述竖直抓取单元300还包括用于控制所述第二升降模块的行程位置的第一感应装置,所述第一感应装置包括:
215.第一感应片53,设置于所述滑板48上;
216.第一感应器54,设置于所述底座44上。
217.在该实施例中,竖直抓取单元300用于抓取在对位以及给料单元200完成矫正工序的金相切片14以及将所述金相切片14抓取至研磨单元500进行研磨工序;具体地,所述第二升降模块的第三电机42安装在第二电机座43上,第二电机座43与第三轴承座46联接后安装于底座44上,第三联轴器45把第三电机42与第二滚珠丝杆组合47的第二丝杆的输入端联接在一起,第二滚珠丝杆组合47的第二丝杆螺母与滑板48固定,其第二丝杆的另一端安装于第四轴承座52上,在滑板48的另一面安装有第三滑块49。第三滑块49与第二滑块50联接,第二滑轨51安装在底座44上,第二升降滑轨组合在第二升降模块升降的过程中,起支撑与导向作用。第二升降模块的限位控制由第一感应片53安装在随第二丝杆螺母上下移动的滑板48上,而第一感应器54则安装在底座44型材的槽条内;
218.具体地,所述取料抓紧模块整组安装于第三滑块49上,其结构是:第二滑轨座55固定在第三滑块49上,在第二滑轨座55内腔两侧各安装有第三滑轨56,第四滑块57可在第三滑轨56上下滑动,其上安装取料气缸座58,而取料气缸座58另一面则安装有第二气缸气爪59,上部安装有缓冲导柱60,在第二滑轨座55、取料气缸座58及缓冲导柱60之间套入缓冲弹簧61。第二气缸气爪59上装有第二气爪夹具62。
219.竖直抓取单元300各模块相互配合的操作过程:
220.在对位以及给料单元(200)完成金相切片14的矫正工序,并处于第一待抓取位置时,竖直抓取单元300在水平驱动单元400的驱动下准确移动至竖直抓取单元300水平取料位置(即第一水平位置)。此时,通过对位模块反馈的数据,竖直抓取单元300的第二升降模块在第三电机42的驱动下,通过第二滚珠丝杆组合47把第二气缸气爪59(第二气缸气爪59处于常开状态)降至与对位以及给料单元(200)的第一气缸气爪28上的第一气爪夹具29所夹紧的金相切片14处于同一水平位置,竖直抓取单元(300)的第二气缸气爪59动作,并通过第二气爪夹具62夹紧金相切片14的另两个侧面(金相切片14原有的两个侧面由对位以及给料单元200的第一气缸气爪28上的第一气爪夹具29所夹紧),在竖直抓取单元300的第二气爪夹具62夹紧后,对位以及给料单元200的第一气缸气爪28复位,原来夹紧金相切片14的第
一气爪夹具29松开。随后,竖直抓取单元300在第三电机42的驱动下,复位到原水平移动高度位置((即第一水平位置)),完成对已矫正的生产金相切片14的抓取工序。
221.参见图5a、图5b,在本实用新型的第七实施例中,所述水平驱动单元400的所述第一驱动模块包括:
222.水平底座64,设置于所述上机架1上;
223.第三电机座65,其设置于所述水平底座64;
224.第四电机63,设置于所述第三电机座65上;
225.所述水平驱动单元400的所述水平移动模块包括:
226.第三滚珠丝杆组合68,包括水平设置的第三丝杆以及可移动套设在所述第三丝杆外侧的第三丝杆螺母;所述第三丝杆的一端安装于第五轴承座67上,另一端安装于第六轴承座73上;
227.第四联轴器66,分别连接所述第三丝杆的输入端以及所述第四电机;
228.水平导轨组合,包括水平设置的水平滑轨70以及水平滑块69;所述水平滑轨70设置于所述水平底座64;
229.移动块71,其一端连接于所述第三丝杆螺母,另一端连接于所述水平滑块69;
230.连接板72,连接于所述移动块71上;所述竖直抓取单元300安装于所述连接板72上;
231.托链槽76,设置于所述水平底座64;
232.托链77,其一端设置于所述托链槽76内,另一端连接所述竖直抓取单元300的底座44;
233.水平驱动单元400还包括用于控制所述水平移动模块的行程位置的第二感应装置,所述第二感应装置包括:
234.第二感应片75,设置于所述移动块71上;
235.第二感应器74,设置于所述水平底座64上。
236.在该实施例中,水平驱动单元400用于驱动竖直抓取单元300移动至预定的位置。水平驱动单元400包括第一驱动模块、水平移动模块以及用于控制所述水平移动模块的行程位置的第二感应装置。具体地,水平驱动单元400整组都固定在机架单元100的上机架1上。而竖直抓取单元300则安装在水平驱动单元400的连接板72上。
237.第一驱动模块包括水平底座64,设置于所述上机架1上,第三电机座65则固定在水平底座64上,第四电机63安装在第三电机座65上,第四联轴器66把第四电机63与第三滚珠丝杆组合68的第三丝杆输入端联接在一起,第三滚珠丝杆组合68的第三丝杆螺母与移动块71固定,其第三丝杆的一端安装在第五轴承座67上,另一端安装于第六轴承座73上,移动块71安装于水平滑块69上,其面上固定连接板72,水平导轨组合的水平滑轨70则安装在水平底座64。水平驱动单元400的第二感应片75安装在移动块71上,而第二感应器74则安装在水平底座64的型材槽条内。在水平底座64上方设计托链槽76,托链77的一端安装在托链槽76内,另一端固定在竖直抓取单元300的底座44上。
238.水平驱动单元400的各个模块配合操作的过程:
239.水平驱动单元400上的连接板72在第四电机63的驱动下将跟随第三滚珠丝杆组合68的第三丝杆螺母及移动块71一起在水平导轨组合的水平滑轨70的导向下沿第三丝杆的
方向左右水平移动。固定联接连接板72上的竖直抓取单元300随其左右移动。例如,竖直抓取单元300需要抓取对位以及给料单元200的完成矫正工序的并且位于第二待抓取位置的金相切片14时,水平驱动单元400控制竖直抓取单元300向左移动至所述第一水平位置,即所述第二待抓取位置的上方,竖直抓取单元300从对位以及给料单元200的所述第二待抓取位置抓取金相切片14后,水平驱动单元400驱动竖直抓取单元300向右移动到研磨单元500的粗磨装置、再向右移动到研磨单元500的中磨装置、根据需要向左移动到所述检测位置通过对位以及给料单元200的ccd装置对金相切片14再次进行ccd对位检测、驱动竖直抓取单元300向右移动到研磨单元500的细磨装置、竖直抓取单元300向右移动到研磨单元500的研磨装置或以及可以向左移动到成品收料盒95的位置;
240.参见图6a、图6b,在本实用新型的第八实施例中,所述研磨单元500的所述研磨模块包括粗磨装置、中磨装置、细磨装置及研磨装置;所述第二驱动模块包括用于驱动所述粗磨装置的第一驱动装置、用于驱动所述中磨装置的第二驱动装置、用于驱动所述细磨装置的第三驱动装置、用于驱动所述研磨装置的第四驱动装置;
241.所述粗磨装置包括粗目金刚砂磨盘85;
242.所述中磨装置包括中目金刚砂磨盘89;
243.所述细磨装置包括细目金刚砂磨盘90;
244.所述研磨装置包括超细目金刚砂磨盘91;
245.所述第一驱动装置包括:
246.电机法兰座81,包括上法兰以及下法兰,上法兰位于下法兰的上方,所述上法兰安装于所述机架单元100的所述下机架2上;
247.第五电机80,安装于所述下法兰;
248.第七轴承座83,连接于所述电机法兰座81的上方;
249.法兰轴84,设置于所述第七轴承座83内;
250.第五联轴器82,其一端与所述法兰轴84连接,另一端与所述第五电机80连接;
251.所述法兰轴84与所述粗目金刚砂磨盘85联动连接;
252.所述研磨单元500还包括第一排水模块,所述第一排水模块包括:
253.底面槽78,所述粗磨装置、中磨装置、细磨装置及研磨装置设置于所述底面槽78内;
254.第一排水管组79,连接于所述底面槽78底部;
255.所述研磨单元500还包括第二排水模块,所述第二排水模块包括:
256.用于排出所述粗磨装置的液体的第一排水装置、用于排出所述中磨装置的液体的第二排水装置、用于排出所述细磨装置的液体的第三排水装置、用于排出所述研磨装置的液体的第四排水装置;
257.所述第一排水装置包括:
258.接水槽86,其环绕所述粗磨装置设置,安装于所述机架单元100的所述下机架2上;
259.第二排水管组88,连接于所述接水槽86的底部;
260.所述第四排水装置包括:
261.接液槽92,其环绕所述研磨装置设置,安装于所述机架单元100的所述下机架2上;
262.排液管组94,连接于所述接液槽92的底部;
263.磨液箱5,与所述排液管组94连通连接;
264.所述研磨单元500还包括给水模块,所述给水模块包括用于向粗磨装置供水的第一供水装置、用于向中磨装置供水的第二供水装置、用于向细磨装置供水的第三供水装置及用于向研磨装置供水的第四供水装置;所述第一供水装置、第二供水装置、第三供水装置以及第四供水装置设置在所述底面槽78上;
265.所述第一供水装置为给水阀组87;
266.所述第四供水装置包括给液阀组93、电动吸液泵,所述电动吸液泵分别与所述给液阀组93以及所述磨液箱5连通连接。
267.在该实施例中,研磨单元500用于对金相切片14进行研磨。研磨单元包括研磨模块以及驱动所述研磨模块工作的第二驱动模块,还包括用于在研磨模块工作时进行给水的给水模块,以及将水排出的排水模块;第二排水模块用于分别收集各个模块研磨过程中产生的水,第一排水模块用于收集研磨过程中溅出的水;具体地,第一排水模块的底面槽78安装在机架单元100的上机架1上,在底面槽78的槽底两侧设计第一排水管组79。研磨单元500的粗磨装置、中磨装置、细磨装置及研磨装置均套入底面槽78中,底面槽78用来收集研磨过程中溅出来的水并通过第一排水管组79排出。用于驱动所述粗磨装置的所述第一驱动装置的第五电机80安装在电机法兰座81下方的下法兰上,位于电机法兰座81的上方的上法兰则固定在机架单元100的下机架2的基座平板下方,第五联轴器82一端联接第五电机80,另一端与法兰轴84联接,法兰轴84安装在第七轴承座83内,第七轴承座83固定在电机法兰座81的上方。在法兰轴84上,固定有粗目金刚砂磨盘85,接水槽86安装在机架单元100的下机架2的基座平板上方。粗磨装置的给水阀组87安装在底面槽78上,接水槽86槽底布置第二排水管组88。中磨装置、细磨装置和研磨装置从第五电机80到法兰轴84、接水槽86及第二排水管组88等都与所述粗磨装置相同,所不同的是金刚砂磨盘中,中磨装置为中目金刚砂磨盘89,细磨装置为细目金刚砂磨盘90,研磨装置为超细目金刚砂磨盘91,另外,用于给研磨装置供水的给液阀组93也安装在底面槽78上,接液槽92安装在机架单元100的下机架2的基座平板上方,其槽底下安装排液管组94。成品收料盒95放置在底面槽78上方与对位以及给料单元200护罩的侧边,可自由装卸。
268.研磨单元500的各个模块的配合操作的过程:
269.当已抓取好金相切片14的竖直抓取单元300在水平驱动单元400的驱动下移动至研磨单元500的粗磨装置正上方的位置(下称第一原始位置)时,竖直抓取单元300的第二升降模块在第三电机42的驱动下,通过第二滚珠丝杆组合47把第二气缸气爪59所抓取好的金相切片14降至研磨单元500的粗磨装置的粗目金刚砂磨盘85上,与此同时,第五电机80驱动法兰轴84快速转动,也带动粗目金刚砂磨盘85快速转动,给水阀组87通过电磁水阀的控制也同时打开,在plc(即控制器)的控制下,根据设定值,竖直抓取单元300的第二升降模块控制金相切片14缓慢向下进给,直至金相切片14磨到符合所述设定值要求。随后,生产金相切片14在竖直抓取单元300的第二升降模块的驱动下向上复位到所述第一原始位置,第五电机80停止驱动,给水阀组87也停止给水,集在接水槽86的水通过第二排水管组88排出,完成了对金相切片14的粗磨工序。金相切片14的中磨工序、细磨工序与金相切片14的粗磨工序类同。但根据金相切片的类型、铜孔直径的不同,plc可在粗磨工序、中磨工序、细磨工序中选择符合要求的组合工序。研磨单元500的最后一道工序是研磨工序,控制步骤与粗磨工序
类同,所不同的是研磨工序只对已磨过的金相切片14表面进行抛光处理,所使用的研磨液通过磨液箱5(见图1)用电动吸液泵进行供液,研磨后研磨液集在接液槽92内通过排液管组94回流到磨液箱5内循环利用。如此完成了对金相切片14的研磨工序。
270.完成研磨工序的金相切片14已成为成品,水平驱动单元400驱动竖直抓取单元300复位至所述研磨装置的上方,水平驱动单元400驱动竖直抓取单元300向左移动到成品收料盒95的上方,由于成品收料盒95宽度受限,而竖直抓取单元300的有两个第二气缸气爪59,因此可以有两组成品,此时无法一次性收料。通过程序设定两个收料位,当竖直抓取单元300到达第一收料位时(此时位于左侧的第二气缸气爪59在成品收料盒95的上方),位于左侧的第二气缸气爪59动作,松开第二气爪夹具62所夹紧的成品,成品落在了成品收料盒95内,随后,竖直抓取单元300到达第二收料位(此时位于右侧的第二气缸气爪59在成品收料盒95的上方),右侧的第二气缸气爪59动作,松开第二气爪夹具62所夹紧的成品,成品落在了成品收料盒95内。完成金相切片成品的收料工序。
271.参见图1和图7,在本实用新型的第九实施例中,所述全自动研磨机1000还包括触摸操控面板单元600,其与所述控制器通信连接,所述触摸操控面板单元600包括:
272.显示屏座板97,设置于所述上机架1;
273.触摸显示屏98,设置于所述显示屏座板97上;
274.电源显示灯99,设置于所述显示屏座板97上;
275.急停开关101,设置于所述显示屏座板97上;
276.操作系统,与所述触摸显示屏98通信连接,接收所述触摸显示屏98的第一信息并发送至所述控制器,以及根据所述控制器发送的第二信息控制所述触摸显示屏98的显示信息。
277.在该实施例中,用户通过触摸操控面板单元600上的各个元件控制全自动研磨机1000的工作,以及输入全自动研磨机1000的操作参数等;所述操作系统的命令及参数设定均可在触摸显示屏98进行显示化操作。(见图7)
278.参见图1、图2以及图6b在本实用新型的第十实施例中,所述全自动研磨机1000还包括成品收料盒95,设置于所述下机架2上;
279.所述下机架为储物及安装台,所述下机架的储物腔内安装有电控箱3,通过在储物腔上设置门盖4进行开合。
280.综上所述,本实用新型的金相切片的全自动研磨机1000通过机架单元100安装对位以及给料单元200、竖直抓取单元300、水平驱动单元400、研磨单元500以及控制器等,使得各个单元可以根据操作过程的需求各自安装在相应的位置。研磨程序开始时,首先可以通过对位以及给料单元200的给料模块将金相切片14移动至第一待抓取位置等待抓取,旋转矫正模块配合第一升降模块抓取金相切片14并将抓取的金相切片14移动至检测位置,对位模块对金相切片14进行检测并返回数据至所述控制器,所述数据可以用于后续金相切片14的研磨过程;然后,竖直抓取单元300配合水平驱动单元400抓取检测完毕的金相切片14并移动至研磨单元500进行研磨,完成研磨工序,整个过程由全自动研磨机1000自动化智能操作。借此,本实用新型的全自动研磨机1000实现了自动对金相切片进行研磨,大大提升了单位时间内的金相切片研磨产出,并且合格率以及可靠性高。
281.当然,本实用新型还可有其它多种实施例,在不背离本实用新型精神及其实质的
情况下,熟悉本领域的技术人员当可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1