换电站及换电方法与流程
[0001]
本申请涉及一种换电站及换电方法。
背景技术:
[0002]
换电是电动车补充电能的一种重要方式,目前已有的换电站的自动换电技术,要完成对车底电池的更换,对场地改造、司机停车技术等都有一定要求。比如有些换电站需要司机把车开到举升机上,设备调整车的姿态后把车举升起来换电;有些换电站需要把车开到一个换电高架桥上,同时桥上有一些导向及定位结构,待车停准后,桥下设备对车辆进行换电。无论哪种模式,都有司机精准停车、设备调整车辆姿态等过程,对人员操作有一定要求,同时设备也较为庞大和复杂。
技术实现要素:
[0003]
鉴于上述状况,有必要提供一种换电站及换电方法,以解决待换电车辆需要以固定姿态驶入一指定位置进行换电的问题。
[0004]
本申请的实施例提供一种换电站,包括换电车位、电贩宝、取电装置和agv机器人。所述换电车位用于停放待换电车辆;所述电贩宝包括用于容置电池的电池仓;所述取电装置用于取出并运送所述电池仓内的电池;所述agv机器人具有用于承载所述电贩宝提供的电池的电池位,包括驱动模组和导航模组,能够通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池位置,并将所述电池位内的电池传递至所述待换电车辆。
[0005]
这种换电站能够为待换电车辆提供电池,并将电池运送给待换电车辆,由于agv机器人自身具有导航模组以驱使agv机器人向待换电车辆的电池位置位移,使得待换电车辆的停放没有特殊的限制。
[0006]
本申请的实施例还提供了一种换电方法,使用上述的换电站对待换电车辆换电,包括:
[0007]
所述待换电车辆以任意姿态进入所述换电车位;
[0008]
所述取电装置从所述电贩宝的所述电池仓取出第一电池;
[0009]
所述agv机器人承接所述取电装置的所述第一电池至所述电池位;
[0010]
所述agv机器人通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池空置位置;
[0011]
所述agv机器人将所述电池位内的所述第一电池传递至所述电池空置位置。
[0012]
通过agv机器人在取电装置上取下第一电池,并通过导航模组指导驱动模块运作,将第一电池运送到待换电车辆的电池空置位置,再将第一电池传递到电池空置位置,使得待换电车辆安装好第一电池。整个过程通过agv机器人自身的导航模组和驱动模组进行待换电车辆位置的确认,使得agv机器人能够找寻到换电车位上任意姿态的待换电车辆,因此对车辆在换电车位这个较大的区域内的停放姿态没有限制,只要在换电车位内,agv机器人都能主动去寻找车辆并匹配车辆的停放姿态。
[0013]
进一步地,在本申请的一些实施例中,在所述agv机器人承接所述取电装置的所述第一电池至所述电池位的步骤前,还包括:
[0014]
所述agv机器人通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池装载位置;
[0015]
所述agv机器人将所述电池装载位置的第二电池取放到所述电池位。
[0016]
在将第一电池运送到待换电车辆之前,还通过agv机器人将待换电车辆中需要取下的第二电池进行取放的操作,在该操作后,原来的装载第二电池的电池装载位置即转化为待装载第一电池的电池空置位置。
[0017]
进一步地,在本申请的一些实施例中,在所述agv机器人将所述电池装载位置的第二电池取放到所述电池位的步骤后,还包括:
[0018]
所述agv机器人位移到中转仓位,所述中转仓位接收所述电池位的所述第二电池。
[0019]
通过中转仓位实现电池的暂时存放,可以将agv机器人的电池位空置出来,以进行后续第一电池的运送。
[0020]
进一步地,在本申请的一些实施例中,在所述agv机器人通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池空置位置的步骤中,包括:
[0021]
所述导航模组通过摄像头拍摄所述待换电车辆的外形信息为所述驱动模组提供驱动信号。
[0022]
通过摄像头得到的外形信息进行导航,可以使得agv机器人在距离电池空置位置较远的时候,先感知车辆的位置,以及电池空置位置所处的大致区域,籍此指导驱动模组向电池空置位置所在的大致区域位移。
[0023]
进一步地,在本申请的一些实施例中,在所述agv机器人通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池空置位置的步骤中,还包括:
[0024]
所述导航模组通过激光定位头与所述待换电车辆的定位件对接;
[0025]
当所述导航模组上的预设数量的所述激光定位头与所述定位件同时处于对接状态时,所述agv机器人与所述电池空置位置对接完成;
[0026]
当所述导航模组上的预设数量的所述激光定位头与所述定位件无法同时处于对接状态时,所述agv机器人持续调整姿态。
[0027]
当agv机器人处于电池空置位置所在的大致区域后,还需要使得agv机器人与电池空置位置进行精确的对接,使得电池能够准确地安放到电池控制位置中。通过激光定位头和定位件的对接,可以知道agv机器人与电池空置位置是否对接完成,而通过agv机器人上激光定位头与定位件的对接状态,可以计算出agv机器人需要进行精调的方向和位移量。
[0028]
进一步地,在本申请的一些实施例中,在所述agv机器人通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池空置位置的步骤中,还包括:
[0029]
所述导航模组通过接近开关与所述待换电车辆的凸起物对接;
[0030]
当所述导航模组上的预设数量的所述接近开关与所述凸起物同时处于对接状态时,所述agv机器人与所述电池空置位置对接完成;
[0031]
当所述导航模组上的预设数量的所述接近开关与所述凸起物无法同时处于对接状态时,所述agv机器人持续调整姿态。
[0032]
接近开关与上述的激光定位头具有类似的技术效果,不过需要在车辆上安装改变
外形的凸起物,或者对所有车辆的现有外形进行分析以找出与电池空置位置具有固定关系的固有凸起物。另一方面,接近开关又会具有更低的故障率,使得导航模组能够维持长时间的正常工作,而不需要频繁的维护调校。
[0033]
进一步地,在本申请的一些实施例中,在所述agv机器人将所述电池位内的电池传递至所述电池空置位置的步骤中,包括:
[0034]
所述agv机器人通过举升结构将所述电池位内的所述第一电池举升至所述电池空置位置内,所述待换电车辆锁止所述电池空置位置内的所述第一电池。
[0035]
agv机器人通过举升结构将电池位内的第一电池举升至电池空置位置,当需要举升电池的时候,举升结构和电池都可以具有较低的位置,因此agv机器人能够进入到具有较低底盘的车辆的底部。
[0036]
进一步地,在本申请的一些实施例中,在所述agv机器人将所述电池位内的所述第一电池传递至所述电池空置位置的步骤后,包括:
[0037]
所述agv机器人向所述待换电车辆发出使得所述待换电车辆在所述电池空置位置内锁止所述第一电池的锁止信号。
[0038]
当第一电池传递到电池空置位置后,需要将电池固定在该位置中,因此agv机器人还需要与待换电车辆进行互动,以通知待换电车辆电池已经运送到位。车辆接收到锁止信号后再启动锁止机构将电池锁止在电池空置位置。
[0039]
进一步地,在本申请的一些实施例中,在所述agv机器人通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池空置位置的步骤中,还包括:
[0040]
所述agv机器人的近场通讯模块向所述待换电车辆交换确认信息,所述agv机器人根据所述确认信息判断是否接近所述电池空置位置。
[0041]
agv机器人通过摄像头来判断自己的行进方向依然存在错误率,通过近场通讯模块与车辆对接可以判断agv机器人的行进方向是否正确,如果近场通讯模块与车辆成功对接,则说明agv机器人具有正确的行进方向,并已经行进到电池空置位置附近。
[0042]
本申请的实施例还提供了一种换电方法,使用上述的换电站对待换电车辆换电,在所述待换电车辆以任意姿态进入所述换电车位的步骤后,重复后续步骤直至所述待换电车辆的所有电池更换完毕:
[0043]
所述取电装置从所述电贩宝的所述电池仓取出第一电池;
[0044]
所述agv机器人通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池装载位置;
[0045]
所述agv机器人将所述电池装载位置的第二电池取放到所述电池位;
[0046]
所述agv机器人位移到中转仓位,所述中转仓位接收所述电池位的所述第二电池;
[0047]
所述agv机器人承接所述取电装置的所述第一电池至所述电池位;
[0048]
所述agv机器人通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池空置位置;
[0049]
所述agv机器人将所述电池位内的所述第一电池传递至所述电池空置位置。
[0050]
通过重复agv机器人将待换电车辆的电池运送至中转仓位,以及将取电装置的电池运送至待换电车辆的步骤,即完成需要更换多块电池的待换电车辆的换电操作。
附图说明
[0051]
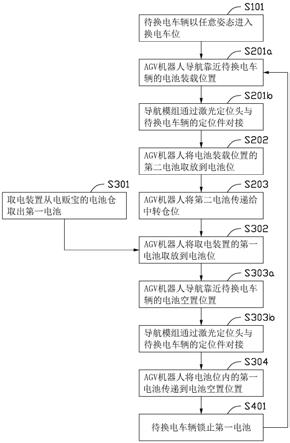
图1是本申请的一个实施例中的换电方法的流程示意图。
[0052]
图2是本申请的一个实施例中的换电站的结构示意图。
[0053]
图3是本申请的一个实施例中的电贩宝和取电装置的结构示意图。
[0054]
图4是本申请的一个实施例中的agv机器人的举升结构将电池放置于电池位内时结构示意图。
[0055]
图5是本申请的一个实施例中的agv机器人的举升结构将电池举升出电池位时结构示意图。
[0056]
图6是本申请的一个实施例中的agv机器人的举升结构伸出电池位时结构示意图。
[0057]
图7是本申请的一个实施例中的agv机器人的举升结构位于电池位内时结构示意图。
[0058]
主要元件符号说明
[0059]
换电站
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
001
[0060]
待换电车辆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
100
[0061]
换电车位
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
200
[0062]
电贩宝
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
300
[0063]
取电装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
400
[0064]
agv机器人
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
500
[0065]
电池仓
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
310
[0066]
电池位
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
510
[0067]
中转仓位
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
600
[0068]
激光定位头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
530
[0069]
摄像头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
550
[0070]
举升结构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
570
[0071]
如下具体实施方式将结合上述附图进一步说明本申请。
具体实施方式
[0072]
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行描述,显然,所描述的实施例仅是本申请一部分实施例,而不是全部的实施例。
[0073]
需要说明的是,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中设置的元件。当一个元件被认为是“设置在”另一个元件,它可以是直接设置在另一个元件上或者可能同时存在居中设置的元件。
[0074]
除非另有定义,本文所使用的所有的技术和科学术语与属于本申请的技术领域的技术人员通常理解的含义相同。本文中在本申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本申请。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
[0075]
本申请的实施例提供一种换电站,包括换电车位、电贩宝、取电装置和agv机器人。所述换电车位用于停放待换电车辆;所述电贩宝包括用于容置电池的电池仓;所述取电装置用于取出并运送所述电池仓内的电池;所述agv机器人具有用于承载所述电贩宝提供的
电池的电池位,包括驱动模组和导航模组,能够通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池位置,并将所述电池位内的电池传递至所述待换电车辆。
[0076]
这种换电站能够为待换电车辆提供电池,并将电池运送给待换电车辆,由于agv机器人自身具有导航模组以驱使agv机器人向待换电车辆的电池位置位移,使得待换电车辆的停放没有特殊的限制。
[0077]
本申请的实施例还提供了一种换电方法,使用上述的换电站对待换电车辆换电,包括:
[0078]
所述待换电车辆以任意姿态进入所述换电车位;
[0079]
所述取电装置从所述电贩宝的所述电池仓取出第一电池;
[0080]
所述agv机器人承接所述取电装置的所述第一电池至所述电池位;
[0081]
所述agv机器人通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池空置位置;
[0082]
所述agv机器人将所述电池位内的所述第一电池传递至所述电池空置位置。
[0083]
本申请的实施例还提供了一种换电方法,使用上述的换电站对待换电车辆换电,在所述待换电车辆以任意姿态进入所述换电车位的步骤后,重复后续步骤直至所述待换电车辆的所有电池更换完毕:
[0084]
所述取电装置从所述电贩宝的所述电池仓取出第一电池;
[0085]
所述agv机器人通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池装载位置;
[0086]
所述agv机器人将所述电池装载位置的第二电池取放到所述电池位;
[0087]
所述agv机器人位移到中转仓位,所述中转仓位接收所述电池位的所述第二电池;
[0088]
所述agv机器人承接所述取电装置的所述第一电池至所述电池位;
[0089]
所述agv机器人通过所述驱动模组和所述导航模组位移到所述待换电车辆的电池空置位置;
[0090]
所述agv机器人将所述电池位内的所述第一电池传递至所述电池空置位置。
[0091]
通过重复agv机器人将待换电车辆的电池运送至中转仓位,以及将取电装置的电池运送至待换电车辆的步骤,即完成需要更换多块电池的待换电车辆的换电操作。
[0092]
下面结合附图,对本申请的实施例作进一步的说明。
[0093]
实施例一
[0094]
请参阅图2和图3,本申请的第一实施例提供一种换电站001,用于为待换电车辆100提供电池,以及将待换电车辆100上取下的电池进行存放。这种换电站001包括换电车位200、电贩宝300、取电装置400和agv机器人500。换电车位200用于停放待换电车辆100;电贩宝300包括用于容置电池的电池仓310;取电装置400用于取出并运送电池仓310内的电池;agv机器人500具有用于承载电贩宝300提供的电池的电池位510,包括驱动模组和导航模组,能够通过驱动模组和导航模组位移到待换电车辆100的电池位510置,并将电池位510内的电池传递至待换电车辆100。
[0095]
通过电贩宝300提供电池,取电装置400将电贩宝300的电池取出并放置到agv机器人500的电池位510,而agv机器人500将电池运送给待换电车辆100。由于agv机器人500自身具有导航模组以驱使agv机器人500向待换电车辆100的电池位510置位移,使得待换电车辆
100的停放没有特殊的限制,待换电车辆100停放到位后,agv机器人500主动识别车辆位置进行导航驱动即可。
[0096]
实施例二
[0097]
请参阅图1、图2和图3,本申请的第二实施例提供一种换电方法,用于为待换电车辆100更换电池。这种换电方法,使用实施例一提供的换电站001对待换电车辆100换电,包括:
[0098]
s101:待换电车辆100以任意姿态进入换电车位200;
[0099]
s301:取电装置400从电贩宝300的电池仓310取出第一电池;
[0100]
s302:agv机器人500承接取电装置400的第一电池至电池位510;
[0101]
s303:agv机器人500通过驱动模组和导航模组位移到待换电车辆100的电池空置位置;
[0102]
s304:agv机器人500将电池位510内的第一电池传递至电池空置位置;
[0103]
s401:待换电车辆100将第一电池锁止。
[0104]
驾驶者或者是无人驾驶的待换电车辆100驶入换电车位200,在换电车位200上停放待换电车辆100后还具有盈余的空间。换电车位200由于提供一较大的空间给待换电车辆100进行停放,能够降低驾驶者的技术需求,当待换电车辆100为无人驾驶车辆的时候,也可以降低人工智能的计算量。待换电车辆100在换电车位200内没有具体的停放要求,只需要进入换电车位200即可,待换电车辆100在换电车位200上以任意姿态停放均可以启动换电站001进行换电。
[0105]
启动换电站001进行换电操作后,agv机器人500在取电装置400上取下第一电池,并通过导航模组指导驱动模块运作,将第一电池运送到待换电车辆100的电池空置位置,再将第一电池传递到电池空置位置,使得待换电车辆100安装好第一电池。整个过程通过agv机器人500自身的导航模组和驱动模组进行待换电车辆100位置的确认,使得agv机器人500能够找寻到换电车位200上任意姿态的待换电车辆100,因此对车辆在换电车位200这个较大的区域内的停放姿态没有限制,只要在换电车位200内,agv机器人500都能主动去寻找车辆并匹配车辆的停放姿态。
[0106]
若待换电车辆100上需要安装第一电池的位置本身已经具有第二电池,则还需要将待换电车辆100上的第二电池取下,因此在步骤s202之前还包括步骤:
[0107]
s201:agv机器人500通过驱动模组和导航模组位移到待换电车辆100的电池装载位置;和,
[0108]
s202:agv机器人500将电池装载位置的第二电池取放到电池位510。
[0109]
自身的导航模组和驱动模组进行待换电车辆100位置的确认,使得agv机器人500能够找寻到换电车位200上任意姿态的待换电车辆100,并与待换电车辆100的电池装载位置进行对接。在agv机器人500与电池装载位置对接完成后,agv机器人500将电池装载位置的第二电池取出。
[0110]
为了进一步减小agv机器人500的体积,agv机器人500仅设置一个电池位510,机器人的体积减小可以让agv机器人500在更狭小的地方运动,但是只有一个电池位510的agv机器人500无法同时承载第一电池和第二电池。因此,在步骤s202后,还包括步骤:
[0111]
s203:agv机器人500位移到中转仓位600,中转仓位600接收电池位510的第二电
池。
[0112]
通过中转仓位600实现电池的暂时存放,可以将agv机器人500的电池位510空置出来,以进行后续第一电池的运送。
[0113]
为了在agv机器人500向待换电车辆100的电池空置位置位移的过程中尽量提供直线的路径,需要agv机器人500具有整体的路径规划。为此,在步骤s303中具体包括步骤:
[0114]
s303a:导航模组通过摄像头550拍摄待换电车辆100的外形信息为驱动模组提供驱动信号。
[0115]
经由摄像头550拍摄待换电车辆100的外形信息以判断电池空置位置所在的大致范围,藉此为驱动模组提供直线路径接近判断出来的电池空置位置所在的大致范围。
[0116]
在agv机器人500接近电池空置位置所在的大致范围后,需要agv机器人500再进行精调以使得电池位510与电池空置位置对接,因此在步骤s303中具体还包括:
[0117]
s303b:导航模组通过激光定位头530与待换电车辆100的定位件对接;
[0118]
s303c:当导航模组上的预设数量的激光定位头530与定位件同时处于对接状态时,agv机器人500与电池空置位置对接完成;
[0119]
s303d:当导航模组上的预设数量的激光定位头530与定位件无法同时处于对接状态时,agv机器人500持续调整姿态。
[0120]
其中,步骤s303c和步骤s303d包括判断行为,agv机器人500在精调过程中实现s303c之前,会反复执行s303d以接近s303c的实现条件。
[0121]
同样的,为了在agv机器人500向待换电车辆100的电池装载位置位移的过程中尽量提供直线的路径,需要agv机器人500具有整体的路径规划。为此,在步骤s201中具体包括步骤:
[0122]
s201a:导航模组通过摄像头550拍摄待换电车辆100的外形信息为驱动模组提供驱动信号。
[0123]
经由摄像头550拍摄待换电车辆100的外形信息以判断电池空置位置所在的大致范围,藉此为驱动模组提供直线路径接近判断出来的电池空置位置所在的大致范围。
[0124]
在agv机器人500接近电池空置位置所在的大致范围后,需要agv机器人500再进行精调以使得电池位510与电池空置位置对接,因此在步骤s303中具体还包括:
[0125]
s201b:导航模组通过激光定位头530与待换电车辆100的定位件对接;
[0126]
s201c:当导航模组上的预设数量的激光定位头530与定位件同时处于对接状态时,agv机器人500与电池装载位置对接完成;
[0127]
s201d:当导航模组上的预设数量的激光定位头530与定位件无法同时处于对接状态时,agv机器人500持续调整姿态。
[0128]
其中,步骤s201c和步骤s201d包括判断行为,agv机器人500在精调过程中实现s201c之前,会反复执行s201d以接近s201c的实现条件。
[0129]
需要说明的是,在其他部分实施例中,也可以在步骤s201中完成一次agv机器人500与待换电车辆100的对接后,在步骤s303中沿用步骤s201中的路径,而不需要重新进行导航,但是这种方式存在被其他情况介入而导致路径变化的情况,比如,在agv机器人500执行步骤s303时,换电车位200中进入一动态物阻挡agv机器人500的运动,使得路径产生变化。
[0130]
为了降低agv机器人500的整体厚度,使得agv机器人500能够为具有较低底盘的车辆进行换电操作,请参阅图4、图5、图6和图7,在agv机器人500内安装有举升机构以举升电池位510内的电池,因此在步骤s304中包括步骤:
[0131]
s304a:agv机器人500通过举升结构570将电池位510内的第一电池举升至电池空置位置内。
[0132]
第一电池通过在传递至电池空置位置后,待换电车辆100还需要将第一电池锁止以带动第一电池同步运动。待换电车辆100需要在确认第一电池已经进入到电池空置位置并可以进行锁止的情况下才进行锁止,因此在步骤s304后还包括步骤:
[0133]
s305:agv机器人500向待换电车辆100发出使得待换电车辆100在电池空置位置内锁止第一电池的锁止信号。
[0134]
为了确认agv机器人500的路径是否正确,还需要待换电车辆100端进行路径的确认,为此,待换电车辆100需要与agv机器人500进行信息交换,具体的,在步骤s303中还包括步骤:
[0135]
s303e:agv机器人500的近场通讯模块向待换电车辆100交换确认信息,agv机器人500根据确认信息判断是否接近电池空置位置。
[0136]
通过近场通讯模块与车辆对接可以判断agv机器人500的行进方向是否正确,如果近场通讯模块与车辆成功对接,则说明agv机器人500具有正确的行进方向,并已经行进到电池空置位置附近。
[0137]
综上,本实施例提供的换电方法的整体流程包括:
[0138]
待换电车辆100以任意姿态进入换电车位200;
[0139]
agv机器人500的导航模组通过摄像头550拍摄待换电车辆100的外形信息为驱动模组提供驱动信号,驱动模组驱动agv机器人500靠近待换电车辆100的电池装载位置;agv机器人500的近场通讯模块向待换电车辆100交换确认信息,agv机器人500根据确认信息判断是否接近电池空置位置;
[0140]
导航模组通过激光定位头530与待换电车辆100的定位件对接;
[0141]
当导航模组上的预设数量的激光定位头530与定位件同时处于对接状态时,agv机器人500与电池装载位置对接完成;或,当导航模组上的预设数量的激光定位头530与定位件无法同时处于对接状态时,agv机器人500持续调整姿态;
[0142]
agv机器人500将电池装载位置的第二电池取放到电池位510;
[0143]
agv机器人500位移到中转仓位600,中转仓位600接收电池位510的第二电池;
[0144]
取电装置400从电贩宝300的电池仓310取出第一电池;
[0145]
agv机器人500承接取电装置400的第一电池至电池位510;
[0146]
agv机器人500的导航模组通过摄像头550拍摄待换电车辆100的外形信息为驱动模组提供驱动信号,驱动模组驱动agv机器人500靠近待换电车辆100的电池空置位置;agv机器人500的近场通讯模块向待换电车辆100交换确认信息,agv机器人500根据确认信息判断是否接近电池空置位置;
[0147]
导航模组通过激光定位头530与待换电车辆100的定位件对接;
[0148]
当导航模组上的预设数量的激光定位头530与定位件同时处于对接状态时,agv机器人500与电池空置位置对接完成;或,当导航模组上的预设数量的激光定位头530与定位
件无法同时处于对接状态时,agv机器人500持续调整姿态;
[0149]
agv机器人500将电池位510内的第一电池传递至电池空置位置;
[0150]
agv机器人500通过举升结构570将电池位510内的第一电池举升至电池空置位置内;
[0151]
agv机器人500向待换电车辆100发出使得待换电车辆100在电池空置位置内锁止第一电池的锁止信号,待换电车辆100锁止第一电池。
[0152]
需要说明的是,在本实施例中通过激光定位头530实现与待换电车辆100的对接,在其他实施例中也可以使用接近开关实现与待换电车辆100的对接,此时步骤s303b、s303c和s303d变为:
[0153]
s303b’:导航模组通过接近开关与待换电车辆100的凸起物对接;
[0154]
s303c’:当导航模组上的预设数量的接近开关与凸起物同时处于对接状态时,agv机器人500与电池空置位置对接完成;
[0155]
s303d’:当导航模组上的预设数量的接近开关与凸起物无法同时处于对接状态时,agv机器人500持续调整姿态。
[0156]
接近开关与上述的激光定位头530具有类似的技术效果,不过需要在车辆上安装改变外形的凸起物,或者对所有车辆的现有外形进行分析以找出与电池空置位置具有固定关系的固有凸起物。另一方面,接近开关又会具有更低的故障率,使得导航模组能够维持长时间的正常工作,而不需要频繁的维护调校。
[0157]
实施例三
[0158]
请参阅图1,本申请的第三实施例提供一种换电方法,用于为多块电池需要更换的待换电车辆100更换电池。这种换电方法与实施例二提供的区别仅在于,需要重复以下步骤直至待换电车辆100的所有电池更换完毕:
[0159]
取电装置400从电贩宝300的电池仓310取出第一电池;
[0160]
agv机器人500通过驱动模组和导航模组位移到待换电车辆100的电池装载位置;
[0161]
agv机器人500将电池装载位置的第二电池取放到电池位510;
[0162]
agv机器人500位移到中转仓位600,中转仓位600接收电池位510的第二电池;
[0163]
agv机器人500承接取电装置400的第一电池至电池位510;
[0164]
agv机器人500通过驱动模组和导航模组位移到待换电车辆100的电池空置位置;
[0165]
agv机器人500将电池位510内的第一电池传递至电池空置位置。
[0166]
通过重复agv机器人500将待换电车辆100的电池运送至中转仓位600,以及将取电装置400的电池运送至待换电车辆100的步骤,即完成需要更换多块电池的待换电车辆100的换电操作。
[0167]
另外,本领域技术人员还可在本申请精神内做其它变化,当然,这些依据本申请精神所做的变化,都应包含在本申请所公开的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1