制动踏板组件的制作方法
1.本实用新型涉及汽车制动技术领域,特别是涉及一种制动踏板组件。
背景技术:
2.现有市场上的制动系统,一般是在制动踏板上有一个触发开关,驾驶员踩制动踏板时开关触发,车尾制动灯全部点亮,这样的设计固然能够满足部分市场的需求,但是很多车主和交通研究者认识到,目前的这种单一制动灯指示方式难以使人们更为准确地掌握前车的制动情况,并做出相应的响应措施。
3.前面的叙述在于提供一般的背景信息,并不一定构成现有技术。
技术实现要素:
4.本实用新型的目的在于提供一种制动踏板组件,能够在不同刹车力度的时候,显示不同程度和/或颜色的制动亮灯。
5.一种制动踏板组件,包括底座、踏板臂、复位元件、以及控制器,所述踏板臂安装所述底座上,所述复位元件设于所述底座和所述踏板臂之间,用于为所述踏板臂提供复位力,所述踏板臂通过转动轴与所述底座枢转连接,所述踏板臂上设有能够随所述踏板臂一起旋转的转动件,所述底座上设有相对所述底座固定的固定件,所述固定件用于感测所述转动件的转角变化,所述控制器用于根据所述转动件的转动角度,控制制动灯的亮度和/或颜色。
6.进一步地,所述控制器能够根据所述踏板臂转动角度与制动灯亮起的数量或者颜色深浅呈线性关系。
7.进一步地,所述踏板臂上设有能够随所述踏板臂一起旋转的第一支架,所述转动件设于所述第一支架上。
8.进一步地,所述底座上固定有第二支架,所述固定件设于所述第二支架上且与所述转动件沿轴向间隔一定的距离。
9.进一步地,所述第一支架自所述踏板臂的靠近所述转动轴的位置延伸至所述转动轴的一端。
10.进一步地,所述转动件安装于所述第一支架的远离所述转动轴的一侧,所述转动件为设于所述第一支架上的磁铁。
11.进一步地,所述第二支架的靠近所述第一支架的一侧安装有pcb板,所述pcb板上设置所述固定件,所述固定件为设于所述pcb板上的霍尔传感器。
12.进一步地,所述霍尔传感器的中心与所述磁铁中心同心。
13.进一步地,所述第一支架与所述踏板臂注塑为一体。
14.进一步地,所述转动件安装于所述第一支架的远离所述转动轴的一侧,所述转动件为设于所述第一支架上的红外线发射装置,所述第二支架的靠近所述第一支架的一侧安装所述固定件,所述固定件为红外线接收装置。
15.本实用新型提供的制动踏板组件,能够根据踏板臂被踩踏的不同刹车程度,利用转动件和固定件将运动信号转化为电信号进行信息传递,进而控制刹车灯的不同亮灯程度,实现了后车人员能够清晰明了的知晓前车的运动状态,减少事故的发生。
附图说明
16.图1为本实施例中制动踏板组件结构示意图。
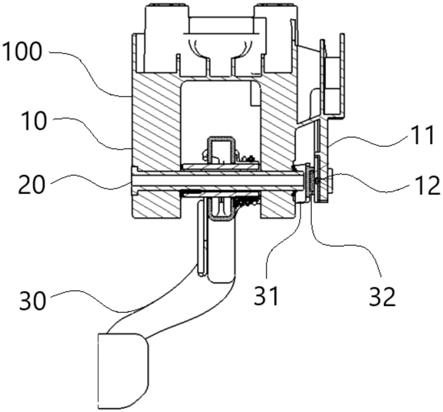
17.图2为图1中制动踏板组件的剖面结构示意图。
18.图3为本实施例中制动踏板组件转动件和固定件部分放大结构示意图。
19.图4为本实施例中尾灯控制电路图。
20.图5为本实施例中制动尾灯示意图。
具体实施方式
21.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
22.如图1所示,一种制动踏板组件100具有底座10、踏板臂30、以及复位元件40。其中,踏板臂30通过转动轴20与底座10枢转连接,复位元件40安装在底座10和踏板臂30之间,本实施例中的复位元件40为穿设于转动轴20上且与底座10和踏板臂30相连的扭簧,可以理解的,本实用新型中的复位元件40还可以为其它能够实现踏板臂30复位功能的复位元件或组件。
23.如图2及图3所示,踏板臂30上设有第一支架31,第一支架31通过二次注塑的方式与踏板臂30一体注塑成型,使第一支架31和踏板臂30的转动角度相同。本实施例的第一支架31为c型结构,其一端设于踏板臂30上,另一端延伸至转动轴20的一端,第一支架31上安装有能够随第一支架31一起转动的转动件32。在本实施例中的转动件32为设于第一支架31上的磁铁。
24.底座10上安装有相对底座10固定不动的第二支架11,第二支架11上装设有pcb板和设于pcb板上的固定件12,固定件12能够感测转动件32的转角变化。在本实用新型中的固定件12为设于pcb板上的霍尔传感器,该霍尔传感器的中心与磁铁中心和转动轴20同心,使其能够在第一支架31上的磁铁随踏板臂30转动时感测磁场变化,产生一表示踏板臂30和磁铁转动角度的电信号,并将电信号传给一控制器,使控制器能够根据踏板臂30和磁铁的转动角度控制汽车尾灯的亮度和/或颜色。
25.具体而言,当驾驶员脚踩制动踏板臂30时,踏板臂30绕转动轴20转动,由于第一支架31与踏板臂30一体注塑成型,第一支架31也会绕着转动轴20转动,而磁铁的中心位于第一支架31的转动中心上,因此踏板臂30转动时,磁铁绕着自身的中心旋转,而布置在磁铁侧边的霍尔传感器识别到磁场的变化,会产生表示踏板臂30转动角度的电信号,将该电信号通过can(控制器局域网络)发给控制器(例如bcm,车身控制器),控制器内存储有转动件的转动角度与制动灯的点亮数量和/或显示颜色的对应关系,且能够根据踏板臂的转动角度控制对应数量的制动灯点亮或者控制制动灯显示对应的颜色。
26.在本实用新型的一个实施例中,当轻踩制动踏板臂30时,霍尔传感器识别到因磁铁的变化角度而产生的磁场变化,将磁场的强弱信号转化为电压的信号,通过pcb板上的比
较器将电压信号转换为pwm波,将pwm波通过can线传递给车身控制器,车身控制器根据pwm波型控制制动尾灯只点亮少部分尾灯或控制尾灯灯光呈现偏淡颜色。当继续加大踩踏板的深度,霍尔传感器将识别到的pwm波传递给车身控制器,车身控制器控制制动尾灯增加亮灯数量或者增加尾灯的颜色深度。当踏板臂30踩到最低时,亮灯数量达到最大或者亮度达到最大。
27.还有一种可替代的实施方式,转动件32安装于第一支架31的远离转动轴20的一侧,转动件为设于第一支架11上的红外线发射装置,第二支架11的靠近第一支架31的一侧安装固定件12,固定件12为红外线接收装置,当轻踩制动踏板臂30时,红外线接收装置识别到红外线的变化,将信号通过can传递给车身控制器,车身控制器控制制动尾灯只点亮少部分尾灯或尾灯灯光颜色偏淡。当继续加大踩踏板的深度,红外线接收装置将识别到的信号传递给车身控制器,车身控制器控制制动尾灯增加亮灯数量或者增加尾灯的颜色深度。当踏板臂30踩到最低时,亮灯数量达到最大或者亮度达到最大。
28.如图4、5所示,车身控制器能够根据制动踏板踩的深浅来进行点亮,分级逐次的点亮1~7的灯光,或者通过颜色的深浅来区别制动踏板踩的深浅。
29.刹车踏板臂30转动极限角度一般为60
°
左右,踏板臂30转动角度与制动灯亮起的数量或者颜色深浅呈线性关系。踩踏臂30转动到1
°
~10
°
时,制动尾灯点亮
①②
;随着踏板踩的深度加深,踏板臂30转动到10
°
~20
°
时,制动灯点亮
①②③
;踏板臂30转动到20
°
~30
°
时,制动灯点亮
①②③④
;踏板臂30转动到30
°
~40
°
时,制动灯点亮
①②③④⑤
;踏板臂30转动到40
°
~50
°
时,制动灯点亮
①②③④⑤⑥
;踏板臂30转动到50
°
~60
°
时,制动灯点亮
①②③④⑤⑥⑦
。还有一种实现方式为,7个刹车尾灯在刹车时全部点亮,在踏板臂30转动到1
°
~15
°
时,尾灯颜色为淡红色;在踏板臂30转动到16
°
~30
°
时,颜色为浅红色;在踏板臂30转动到31
°
~45
°
时,颜色为红色;在踏板臂30转动到46
°
~60
°
时,颜色为深红色,如此,使bcm(车身控制器)控制尾灯点亮数量或者灯光颜色。
30.综上所述,本实用新型能够根据踏板臂30被踩踏的不同深度,利用转动件32和固定件12将运动信号转化为电信号进行信息传递,进而控制刹车灯的不同亮灯程度和/或颜色深浅,使后车人员能够清晰明了的知晓前车的运动状态,减少事故的发生。
31.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
32.在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,除了包含所列的那些要素,而且还可包含没有明确列出的其他要素。
33.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1