一种具有深潜功能的海洋环境探测平台及其探测方法
1.本发明涉及一种环境探测平台,尤其是一种具有深潜功能的海洋环境探测平台。
背景技术:
2.跨介质海洋探测设备最早可追溯到1934年提出的潜空两栖跨介质飞机概念。然而,由于水环境和空气环境之间的显著差异,航行器要同时满足两种介质的要求并不是一件容易的事。尽管美国等一些国家提出了许多载人两栖飞机设计方案,但最终都没有真正地实现海空两栖航行。近几十年,随着无人系统技术的发展,跨介质探测装备的研究取得较大进展,产生了很多的概念和变体,与有人航行器相比,这种系统的复杂度和技术难度有所降低。但是,总体来看这些跨介质探测设备仅能进行浅海航行,难以满足深海探测需求。
3.具有深潜功能的跨介质海洋环境探测平台还存在许多技术难题需要克服。如,探测平台空中飞行和深潜对重量需求的矛盾、介质之间模态过渡的实现、满足要求的多种介质推进系统设计、姿态稳定性等。为了解决这些问题,本发明提出了一种具有深潜功能的海洋环境探测平台。
技术实现要素:
4.发明目的:提供一种具有深潜功能的海洋环境探测平台,能够实现探测较深海域环境的需要。
5.技术方案:本发明所述的具有深潜功能的海洋环境探测平台,包括控制仓、四组旋翼机构、漂浮气囊、设备安装框架、传感机构安装盒、居中夹紧机构、降落支撑机构以及配重调整机构;四组旋翼机构均安装在控制仓上;设备安装框架为u形框架;设备安装框架的两侧上边缘均固定在控制仓的下侧面上;漂浮气囊环绕式安装在设备安装框架的上部;在设备安装框架上安装有一个用于为漂浮气囊充放气的气泵;配重调整机构安装在设备安装框架的下部,用于调整设备整体的重量;居中夹紧机构安装在设备安装框架上,用于夹紧安装传感机构安装盒;降落支撑机构折叠安装在设备安装框架上,并与配重调整机构联动,用于在配重调整机构释放配重时联动展开支撑;在传感机构安装盒的外侧壁上设置有水深传感器、温度传感器以及盐度传感器;在设备安装框架的下侧面上安装有一个声呐;在控制仓的外侧壁上设置有气压传感器;在控制仓内设置有gps模块、陀螺仪、控制器、气泵驱动电路、存储器以及无线通信模块,声呐、气泵驱动电路、气压传感器、无线通信模块、存储器、水深传感器、温度传感器以及盐度传感器均与控制器电连接;控制器通过气泵驱动电路驱动气泵充放气;配重调整机构以及四组旋翼机构均由控制器驱动。
6.进一步的,每组旋翼机构均包括旋翼悬臂、旋翼、旋翼驱动电机以及圆筒形涵道;四个旋翼悬臂的一端分别安装在控制仓的前后左右四个侧面上,且四个旋翼悬臂呈十字形分布;旋翼驱动电机安装在旋翼悬臂的另一端上,且旋翼驱动电机的输出轴竖直向上;旋翼
安装在旋翼驱动电机的输出轴上;圆筒形涵道固定在旋翼悬臂上,且圆筒形涵道的中心线与旋翼驱动电机的输出轴的轴线重合;旋翼的叶片尖端贴近圆筒形涵道的内侧壁;四个圆筒形涵道通过连接板连接;在连接板的中心处且位于控制仓上方设置有一个通气口;在控制仓内设置有旋翼电机驱动电路,旋翼电机驱动电路与控制器电连接,控制器通过旋翼电机驱动电路协调控制四个旋翼驱动电机。
7.进一步的,在每个旋翼驱动电机的下方均安装有一个浮力罐;浮力罐为双层结构,外层为炭纤维外壳,内部为充满高压气体的不锈钢储气罐。
8.进一步的,配重调整机构包括两个配重盒、配重盒驱动电机、两个配重块、两块配重块挡板以及一个主动齿轮;两个配重盒分别固定在设备安装框架左右两侧面的下部;两个配重块设置在两个配重盒内;在两个配重盒的下侧面上均设置有一个用于配重块滑出的开口;在设备安装框架内水平间隔设置有两块隔板,两块隔板将设备安装框架内空间分隔为上层空间、中层空间以及下层空间;传感机构安装盒位于上层空间;配重盒驱动电机安装在下层空间内,且配重盒驱动电机的输出轴端部贯穿隔板后伸入中层空间;主动齿轮安装在配重盒驱动电机输出轴的贯穿端上;在设备安装框架的左右两侧壁上分别纵向设置有一个长条孔,且两个长条孔均与中层空间连通;两块配重块挡板分别通过两个长条孔伸出设备安装框架外,且两块配重块挡板的伸出侧分别延伸至对应侧的配重盒下方;在左侧的配重块挡板的后侧边缘上以及右侧的配重块挡板的前侧边缘上均固定有齿条,且两个齿条均与主动齿轮相啮合;在两块配重块挡板的上侧面上均固定有一块定位板,用于按压在设备安装框架对应侧的内侧面上;在下侧的隔板上侧面上固定有两个用于对两块配重块挡板进行纵向限位的限位板;在两块限位板上均固定有一个按压在对应侧的配重块挡板上侧面上的按压翻边;在控制仓内设置有配重电机驱动电路,配重电机驱动电路与控制器电连接,控制器通过配重电机驱动电路驱动配重盒驱动电机旋转。
9.进一步的,居中夹紧机构由手拧螺栓以及压板组成;在设备安装框架内且位于上侧的隔板上方横向固定有一块固定板;在上侧的隔板中心处设置有一个螺纹孔,手拧螺栓螺纹旋合在螺纹孔上,且手拧螺栓的上端向上穿过上侧的隔板后旋转式安装在压板的下侧面上;在手拧螺栓上螺纹旋合安装有一个用于并紧的夹紧螺母;压板的上侧面紧压在传感机构安装盒的下侧面上,传感机构安装盒的上侧面紧压在固定板的下侧面上。
10.进一步的,在压板的上侧面上设置有橡胶垫。
11.进一步的,降落支撑机构包括四个支撑杆、四个弹簧卡扣、以及四个连动杆;在两个配重块的前后两侧面上均设置有一个圆槽,且每个圆槽的下部均位于配重盒外;在每个圆槽的下方均设置有一个与圆槽连通的竖向槽;四个支撑杆两两分别铰接式安装在设备安装框架的左右两侧面上,右侧的两个支撑杆分别位于右侧的配重盒的前后两侧,左侧的两个支撑杆分别位于左侧的配重盒的前后两侧;四个连动杆分别固定在四个支撑杆上,且四个连动杆的端部分别伸入对应侧配重盒外的圆槽内;四个弹簧卡扣均安装在设备安装框架上,且四个弹簧卡扣分别位于四个支撑杆的下方,用卡扣支撑杆。
12.进一步的,弹簧卡扣为u形弹性卡扣,在弹簧卡扣的两侧边缘上均设置有向外的卡扣翻边;在每个弹簧卡扣的两个内侧边缘上均设置有一个卡扣条;在每个支撑杆上均设置有一个用于与卡扣条配合的卡扣平面。
13.本发明还提供了一种具有深潜功能的海洋环境探测平台的探测方法,包括如下步骤:参数设定步骤:预先设定需要探测位置的坐标以及需要测量的各个深度,并储存在存储器中;下潜探测步骤:步骤一,控制器协调控制四组旋翼机构起飞,并通过gps模块实时比对坐标信息,使探测平台飞行至设定的坐标位置处,之后控制器通过气压传感器以及陀螺仪协调控制该探测平台平稳降落于水面;步骤二,控制器通过气泵驱动电路控制气泵为漂浮气囊放气,使该多旋翼跨介质海洋环境探测平台的重力大于浮力下潜;步骤三,水深传感器实时检测水深数据并向控制器反馈,由控制器判断是否到达设定深度,当控制器判断探测平台到达设定深度时,控制器协调控制四组旋翼机构运动产生推力,使探测平台悬浮在设定深度,同时控制器控制温度传感器、盐度传感器以及水深传感器采集该指定深度的温度、盐度以及水深数据并存入存储器中,该深度数据采集完成后控制器控制四组旋翼机构停止运动;步骤四,重复步骤三直至探测平台采集完各个设定深度的数据后,探测完成;上浮回收步骤:探测完成后,控制器控制配重调整机构释放配重,使探测平台的浮力大于重力浮出水面,水深传感器与气压传感器实时检测数据并向控制器反馈,由控制器判断四组旋翼机构是否完全浮出水面,当控制器判断四组旋翼机构完全浮出水面时,控制器协调控制四组旋翼机构起飞,使该多旋翼跨介质海洋环境探测平台飞回观测站完成回收。
14.进一步的,还包括避障步骤:声呐实时检测探测平台周围环境并向控制器反馈信号,由控制器判断周围是否存在障碍物,当控制器判断周围存在障碍物时,控制器协调控制四组旋翼机构运动产生推力避开障碍物。
15.本发明与现有技术相比,其有益效果是:利用水深传感器、温度传感器以及盐度传感器实现数据采集;利用气泵为漂浮气囊充放气,使下潜过程中漂浮气囊体积减小浮力大于重力,实现下潜;利用配重调整机构在数据采集完成后释放配重,使重力大于浮力,实现上浮;利用居中夹紧机构便于安装传感机构安装盒,便于更换携带不同传感器的传感机构安装盒,同时居中夹紧机构将传感机构安装盒居中夹紧,保证了重心居中。利用降落支撑机构与配重调整机构联动,保证降落支撑机构在数据采集完成之前不影响各个传感器,同时防止回收降落时磕碰仪器。
附图说明
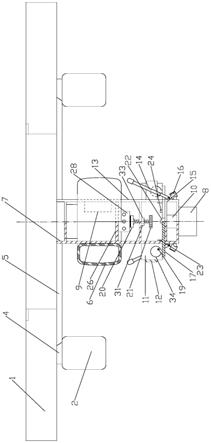
16.图1为本发明的前视图;图2为本发明的仰视图;图3为本发明配重调整机构的左视图;图4为本发明设备安装框架的剖视图;图5为本发明的俯视图;图6为本发明的电路结构示意图。
具体实施方式
17.下面结合附图对本发明技术方案进行详细说明,但是本发明的保护范围不局限于所述实施例。
18.实施例1:如图1
‑
6所示,本发明公开的具有深潜功能的海洋环境探测平台包括:控制仓7、四组旋翼机构、漂浮气囊6、设备安装框架13、传感机构安装盒28、居中夹紧机构、降落支撑机构以及配重调整机构;四组旋翼机构均安装在控制仓7上;设备安装框架13为u形框架;设备安装框架13的两侧上边缘均固定在控制仓7的下侧面上;漂浮气囊6环绕式安装在设备安装框架13的上部;在设备安装框架13上安装有一个用于为漂浮气囊6充放气的气泵9;配重调整机构安装在设备安装框架13的下部,用于调整设备整体的重量;居中夹紧机构安装在设备安装框架13上,用于夹紧安装传感机构安装盒28;降落支撑机构折叠安装在设备安装框架13上,并与配重调整机构联动,用于在配重调整机构释放配重时联动展开支撑;在传感机构安装盒28的外侧壁上设置有水深传感器、温度传感器以及盐度传感器;在设备安装框架13的下侧面上安装有一个声呐8;在控制仓7的外侧壁上设置有气压传感器;在控制仓7内设置有gps模块、陀螺仪、控制器、气泵驱动电路、存储器以及无线通信模块,声呐8、气泵驱动电路、气压传感器、无线通信模块、存储器、水深传感器、温度传感器以及盐度传感器均与控制器电连接;控制器通过气泵驱动电路驱动气泵9充放气;配重调整机构以及四组旋翼机构均由控制器驱动。
19.利用水深传感器、温度传感器以及盐度传感器实现数据采集;利用气泵9为漂浮气囊6充放气,使下潜过程中漂浮气囊6体积减小浮力大于重力,实现下潜;利用配重调整机构在数据采集完成后释放配重,使重力大于浮力,实现上浮;利用居中夹紧机构便于安装传感机构安装盒28,便于更换携带不同传感器的传感机构安装盒28,同时居中夹紧机构将传感机构安装盒28居中夹紧,保证了重心居中。利用降落支撑机构与配重调整机构联动,保证降落支撑机构在数据采集完成之前不影响各个传感器,同时防止回收降落时磕碰仪器。
20.进一步的,每组旋翼机构均包括旋翼悬臂5、旋翼3、旋翼驱动电机4以及圆筒形涵道1;四个旋翼悬臂5的一端分别安装在控制仓7的前后左右四个侧面上,且四个旋翼悬臂5呈十字形分布;旋翼驱动电机4安装在旋翼悬臂5的另一端上,且旋翼驱动电机4的输出轴竖直向上;旋翼3安装在旋翼驱动电机4的输出轴上;圆筒形涵道1固定在旋翼悬臂5上,且圆筒形涵道1的中心线与旋翼驱动电机4的输出轴的轴线重合;旋翼3的叶片尖端贴近圆筒形涵道1的内侧壁;四个圆筒形涵道1通过连接板18连接;在连接板18的中心处且位于控制仓7上方设置有一个通气口32;在控制仓7内设置有旋翼电机驱动电路,旋翼电机驱动电路与控制器电连接,控制器通过旋翼电机驱动电路协调控制四个旋翼驱动电机4。
21.利用圆筒形涵道1减小了旋翼3诱导阻力,使旋翼3产生更大的推力,同时旋翼3叶片尖端贴近圆筒形涵道1,降低了叶片尖端的气流损失;利用通气口32减小上升或下降时的空气阻力。
22.进一步的,在在每个旋翼驱动电机4的下方均安装有一个浮力罐2;浮力罐2为双层结构,外层为炭纤维外壳,内部为充满高压气体的不锈钢储气罐。
23.利用浮力罐2保证了该探测平台在水面上的平稳性,并可以抵抗一定的海浪扰动对起飞的影响;利用双层结构防止不锈钢储气罐在下潜过程中因水压变形。
24.进一步的,配重调整机构包括两个配重盒12、配重盒驱动电机10、两个配重块11、两块配重块挡板17以及一个主动齿轮22;两个配重盒12分别固定在设备安装框架13左右两侧面的下部;两个配重块11设置在两个配重盒12内;在两个配重盒12的下侧面上均设置有一个用于配重块11滑出的开口;在设备安装框架13内水平间隔设置有两块隔板15,两块隔板15将设备安装框架13内空间分隔为上层空间、中层空间以及下层空间;传感机构安装盒28位于上层空间;配重盒驱动电机10安装在下层空间内,且配重盒驱动电机10的输出轴端部贯穿隔板15后伸入中层空间;主动齿轮22安装在配重盒驱动电机10输出轴的贯穿端上;在设备安装框架13的左右两侧壁上分别纵向设置有一个长条孔,且两个长条孔均与中层空间连通;两块配重块挡板17分别通过两个长条孔伸出设备安装框架13外,且两块配重块挡板17的伸出侧分别延伸至对应侧的配重盒12下方;在左侧的配重块挡板17的后侧边缘上以及右侧的配重块挡板17的前侧边缘上均固定有齿条,且两个齿条均与主动齿轮22相啮合;在两块配重块挡板17的上侧面上均固定有一块定位板23,用于按压在设备安装框架13对应侧的内侧面上;在下侧的隔板15上侧面上固定有两个用于对两块配重块挡板17进行纵向限位的限位板24;在两块限位板24上均固定有一个按压在对应侧的配重块挡板17上侧面上的按压翻边;在控制仓7内设置有配重电机驱动电路,配重电机驱动电路与控制器电连接,控制器通过配重电机驱动电路驱动配重盒驱动电机10旋转。
25.利用配重盒驱动电机10通过主动齿轮22同步控制两块配重块挡板17,使两块配重块挡板17同步缩回设备安装框架13内,从而保证两个配重块11同步下落;利用定位板23防止两块配重块挡板17与主动齿轮22脱离配合掉出设备安装框架13外;利用长条孔、限位板24与配重块挡板17之间的配合,对两块配重块挡板17进行纵向限位,保证了两块配重块挡板17与主动齿轮22配合的稳定性,同时防止配重块挡板17的伸出端上下摆动。
26.进一步的,居中夹紧机构由手拧螺栓21以及压板20组成;在设备安装框架13内且位于上侧的隔板15上方横向固定有一块固定板26;在上侧的隔板15中心处设置有一个螺纹孔,手拧螺栓21螺纹旋合在螺纹孔上,且手拧螺栓21的上端向上穿过上侧的隔板15后旋转式安装在压板20的下侧面上;在手拧螺栓21上螺纹旋合安装有一个用于并紧的夹紧螺母33;压板20的上侧面紧压在传感机构安装盒28的下侧面上,传感机构安装盒28的上侧面紧压在固定板26的下侧面上。
27.利用螺纹孔与手拧螺栓21的组合,保证压板20将传感机构安装盒28紧压在固定板26上;利用夹紧螺母33并紧,实现夹紧螺栓21的机械防松。
28.进一步的,在压板20的上侧面上设置有橡胶垫。利用橡胶垫防止传感机构安装盒28被挤压变形。
29.进一步的,降落支撑机构包括四个支撑杆14、四个弹簧卡扣16、以及四个连动杆19;在两个配重块11的前后两侧面上均设置有一个圆槽34,且每个圆槽34的下部均位于配重盒12外;在每个圆槽34的下方均设置有一个与圆槽34连通的竖向槽;四个支撑杆14两两分别铰接式安装在设备安装框架13的左右两侧面上,右侧的两个支撑杆14分别位于右侧的配重盒12的前后两侧,左侧的两个支撑杆14分别位于左侧的配重盒12的前后两侧;四个连
动杆19分别固定在四个支撑杆14上,且四个连动杆19的端部分别伸入对应侧配重盒12外的圆槽34内;四个弹簧卡扣16均安装在设备安装框架13上,且四个弹簧卡扣16分别位于四个支撑杆14的下方,用于卡扣支撑杆14。
30.利用四个连动杆19伸入对应侧的圆槽内,保证在释放配重块11后连动杆19在对应的圆槽内摆动,且连动杆19被配重块11压下,带动支撑杆14下摆,实现了四个支撑杆14与配重调整机构之间的联动;利用四个弹簧卡扣16卡扣四个支撑杆14,实现了支撑杆14的锁定;利用竖向槽保证在支撑杆14锁定后,且在配重块11绕对应侧的两个连动杆19旋转后,连动杆19通过竖向槽脱离配重块11。
31.进一步的,弹簧卡扣16为u形弹性卡扣,在弹簧卡扣16的两侧边缘上均设置有向外的卡扣翻边;在每个弹簧卡扣16的两个内侧边缘上均设置有一个卡扣条;在每个支撑杆14上均设置有一个用于与卡扣条配合的卡扣平面。
32.利用卡扣条与卡扣平面之间的配合,增强锁定强度,防止落地时的冲击导致支撑杆14脱离弹簧卡扣16;利用弹簧卡扣16两侧边缘上的卡扣翻边保证支撑杆14准确的卡扣在弹簧卡扣16内。
33.如图6所示,本发明还提供了一种具有深潜功能的海洋环境探测平台的探测方法,包括如下步骤:下潜探测步骤:步骤一,控制器协调控制四组旋翼机构起飞,并通过gps模块实时比对坐标信息,使探测平台飞行至设定的坐标位置处,之后控制器通过气压传感器以及陀螺仪协调控制该探测平台平稳降落于水面;步骤二,控制器通过气泵驱动电路控制气泵9为漂浮气囊6放气,使该多旋翼跨介质海洋环境探测平台的重力大于浮力下潜;步骤三,水深传感器实时检测水深数据并向控制器反馈,由控制器判断是否到达设定深度,当控制器判断探测平台到达设定深度时,控制器协调控制四组旋翼机构运动产生推力,使探测平台悬浮在设定深度,同时控制器控制温度传感器、盐度传感器以及水深传感器采集该指定深度的温度、盐度以及水深数据并存入存储器中,该深度数据采集完成后控制器控制四组旋翼机构停止运动;步骤四,重复步骤三直至探测平台采集完各个设定深度的数据后,探测完成;上浮回收步骤:探测完成后,控制器控制配重调整机构释放配重,使探测平台的浮力大于重力浮出水面,水深传感器与气压传感器实时检测数据并向控制器反馈,由控制器判断四组旋翼机构是否完全浮出水面,当控制器判断四组旋翼机构完全浮出水面时,控制器协调控制四组旋翼机构起飞,使该多旋翼跨介质海洋环境探测平台飞回观测站完成回收。
34.进一步的,还包括避障步骤:声呐8实时检测探测平台周围环境并向控制器反馈信号,由控制器判断周围是否存在障碍物,当控制器判断周围存在障碍物时,控制器协调控制四组旋翼机构运动产生推力避开障碍物。
35.通过上述的具有深潜功能的海洋环境探测平台的探测方法,能够实现该具有深潜功能的海洋环境探测平台自动探测数据并返回观测站。
36.如上所述,尽管参照特定的优选实施例已经表示和表述了本发明,但其不得解释
为对本发明自身的限制。在不脱离所附权利要求定义的本发明的精神和范围前提下,可对其在形式上和细节上做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1