矿用无轨胶轮车的电控系统的制作方法
1.本实用新型涉及矿用防爆机车技术领域,尤其涉及一种矿用无轨胶轮车的电控系统。
背景技术:
2.矿用防爆车辆是一种用于煤矿井下危险环境的无轨辅助运输车辆,承担着煤矿井下机电设备、工具耗材、人员的运送任务;因其高效快捷的运输方式,广泛应用于现代煤矿辅助运输。矿用防爆车辆发动机的类型不同,其对应的电控系统也会不同。
3.现有防爆柴油机无轨胶轮车的电控系统还存在一些不足,例如,监测参数接口种类少,无法满足传感器数量的变化;在车辆电气自动控制方面,灯光控制无法反馈检测、刹车、倒车等情况;在辅助驾驶方面,车辆周围没有360度全景影像覆盖,缺少与障碍物之间的距离检测;在数据记录方面,没有对驾驶员行为进行监测,没有行车沿途影像数据记录与存储功能,没有电气监测数据记录与存储功能;在车辆通信与定位方面,没有设置车载语音通信装置等。
技术实现要素:
4.本实用新型要解决的技术问题是:为了解决现有技术中的电控系统功能不足的技术问题,本实用新型提供一种矿用无轨胶轮车的电控系统,能够满足多种需求,电控系统具备的功能更加完善。
5.本实用新型解决其技术问题所采用的技术方案是:一种矿用无轨胶轮车的电控系统包括:数据采集器、辅助驾驶计算主机、灯光控制装置、显示器、智能控制终端、电源控制器、摄像头、毫米波雷达及超声波雷达,所述数据采集器与所述显示器之间通信连接,所述灯光控制装置与所述显示器之间通信连接,所述辅助驾驶计算主机与所述显示器之间通信连接,所述摄像头、所述毫米波雷达、所述超声波雷达分别与所述辅助驾驶计算主机连接,所述数据采集器、所述辅助驾驶计算主机、所述灯光控制装置、所述智能控制终端分别与所述电源控制器连接。
6.本实用新型的矿用无轨胶轮车的电控系统,通过数据采集器可以监测车辆和环境参数,通过显示器使得系统具备仪表显示界面和全景影像显示,也能够显示数据采集器采集到的参数。通过灯光控制装置使得具备车灯自诊断功能、刹车、倒车自动控制功能、多路本安电源输出能力、多路非安控制开出能力。通过摄像头、毫米波雷达及超声波雷达使得整车布置4个低照度摄像头就能够具备车辆周围全景影像,近距离探测使用超声波雷达,探测距离为0.2-5m,远距离探测使用毫米波雷达,探测距离为1-40m。通过灯光控制装置的本安面板旋钮或手柄控制非安继电器箱,使得操纵部件更符合驾驶习惯,刹车、倒车灯光及信号可以自动控制,车灯状态具备自诊断功能。相比目前的倒车影像及雷达测距,全景影像更加直观地观察车辆周围状态,超声波雷达通过选型可以测距到5m范围内,毫米波雷达测距可达40m。
7.进一步,具体的,所述数据采集器连接有多种参数检测元件及传感器。所述采集器可以连接不同的元件或传感器采集车辆状态参数或者环境参数,并将采集的电信号换算成对应的实际物理量值,根据设定的超限报警和超限动作逻辑,标记相应数据位,最终将数据通过can总线发送给显示器。
8.进一步,具体的,所述辅助驾驶计算主机包括imx6核心处理模块、视频解码模块、雷达处理模块及存储模块,所述视频解码模块、所述雷达处理模块分别与所述imx6核心处理模块连接,所述视频解码模块与所述摄像头连接,所述毫米波雷达与所述雷达处理模块连接,所述超声波雷达与所述雷达处理模块连接,所述存储模块与所述imx6核心处理模块连接。辅助驾驶计算主机可以接收摄像头、毫米波雷达和超声波雷达的数据并传输给显示器进行显示,同时具备存储功能,方便查看历史记录。
9.进一步,具体的,所述灯光控制装置包括控制单元及操作面板,所述控制单元与所述操作面板连接。灯光控制装置可以智能控制车灯的状态并发给显示器进行显示。
10.进一步,具体的,所述显示器包括全景影像显示单元和参数显示单元,所述全景影像显示单元与所述辅助驾驶计算主机连接,所述参数显示单元与所述数据采集器连接,所述参数显示单元与所述灯光控制装置连接。显示器可以同时显示多种参数或影像,提高利用率,节约成本。
11.进一步,具体的,所述摄像头为720p高清模拟摄像头,数量为1-4个。
12.进一步,具体的,所述毫米波雷达的数量为1-2个,所述超声波雷达的数量为1-4个。
13.本实用新型的有益效果是,本实用新型的矿用无轨胶轮车的电控系统,通过数据采集器可以监测车辆和环境参数,通过显示器使得系统具备仪表显示界面和全景影像显示,也能够显示数据采集器采集到的参数。通过灯光控制装置使得具备车灯自诊断功能、刹车、倒车自动控制功能、多路本安电源输出能力、多路非安控制开出能力。通过摄像头、毫米波雷达及超声波雷达使得整车布置4个低照度摄像头就能够具备车辆周围全景影像,近距离探测使用超声波雷达,探测距离为0.2-5m,远距离探测使用毫米波雷达,探测距离为1-40m。通过灯光控制装置的本安面板旋钮或手柄控制非安继电器箱,使得操纵部件更符合驾驶习惯,刹车、倒车灯光及信号可以自动控制,车灯状态具备自诊断功能。相比目前的倒车影像及雷达测距,全景影像更加直观地观察车辆周围状态,超声波雷达通过选型可以测距到5m范围内,毫米波雷达测距可达40m。
附图说明
14.下面结合附图和实施例对本实用新型进一步说明。
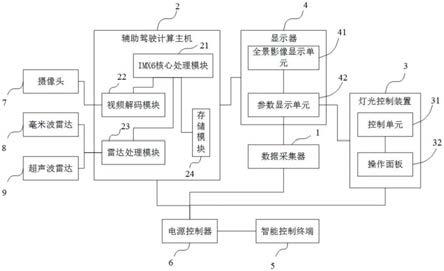
15.图1是本实用新型最优实施例的结构示意图。
16.图中:1、数据采集器,2、辅助驾驶计算主机,3、灯光控制装置,4、显示器,5、智能控制终端,6、电源控制器,7、摄像头,8、毫米波雷达,9、超声波雷达,21、imx6核心处理模块,22、视频解码模块,23、雷达处理模块,24、存储模块,31、控制单元,32、操作面板,41、全景影像显示单元,42、参数显示单元。
具体实施方式
17.现在结合附图对本实用新型作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本实用新型的基本结构,因此其仅显示与本实用新型有关的构成。
18.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
19.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
20.如图1所示,是本实用新型最优实施例,一种矿用无轨胶轮车的电控系统包括数据采集器1、辅助驾驶计算主机2、灯光控制装置3、显示器4、智能控制终端5、电源控制器6、摄像头7、毫米波雷达8及超声波雷达9。数据采集器1与显示器4之间通信连接,灯光控制装置3与显示器4之间通信连接,辅助驾驶计算主机2与显示器4之间通信连接,摄像头7、毫米波雷达8、超声波雷达9分别与辅助驾驶计算主机2连接,数据采集器1、辅助驾驶计算主机2、灯光控制装置3、智能控制终端5分别与电源控制器6连接。
21.数据采集器1连接有多种参数检测元件及传感器。例如,数据采集器1可以外接温度元件、转速元件、机油压力元件、倒车检测元件、刹车检测元件、开关量水位元件、模拟量液位元件、倾角传感器、甲烷传感器、一氧化碳传感器、超声波雷达传感器等进行信号采集,并将采集的电信号换算成对应的实际物理量值,根据设定的超限报警和超限动作逻辑,标记相应数据位,最终将数据通过can总线发送给显示器4。在本实施例中,数据采集器1具备六路温度监测,八路开关量/模拟量液位/模拟量压力复用监测端口,转速、车速监测端口,数据采集器1具备can、uart、rs485、i2c通信接口,具备本安有源开出功能,以及具备超限报警数据和超限动作数据总线标记功能。
22.辅助驾驶计算主机2包括imx6核心处理模块21、视频解码模块22、雷达处理模块23及存储模块24,视频解码模块22、雷达处理模块23分别与imx6核心处理模块21连接,视频解码模块22与摄像头7连接,毫米波雷达8与雷达处理模块23连接,超声波雷达9与雷达处理模块23连接,存储模块24与imx6核心处理模块21连接。辅助驾驶计算主机2包括多种通信接口(can、rs485、uart、以太网、ahd等),雷达处理模块23能够接收毫米波雷达8探测到的距离进行障碍物识别,毫米波雷达8的探测距离为1-40米,雷达处理模块23能够接收超声波雷达9探测到的距离进行泊车辅助,超声波雷达9的探测距离为0.2-5米,视频解码模块22具有ahd视频解码、音频编码、h.254视频编码、视频网络传输等功能,存储模块24具备256g空间的行车视频存储的功能。
23.灯光控制装置3包括控制单元31及操作面板32,控制单元31与操作面板32连接。操
作面板32可以采集10个面板旋转开关接点信号,并通过can总线发送给控制单元31,控制单元31接收操作面板32发送的总线信号,并根据协议解析控制相应的输出,并且能够诊断开出节点所接负载工作情况,通过总线发送给显示器4,显示器4能够显示相应的图标和车灯的工作状态。
24.显示器4包括全景影像显示单元41和参数显示单元42,全景影像显示单元41与辅助驾驶计算主机2连接,参数显示单元42与数据采集器1连接,参数显示单元42与灯光控制装置3连接。显示器4具有多种通信接口(can、rs485、以太网、ahd视频、4g/5g/wifi等),可以与辅助驾驶计算主机2进行通信rs4852命令交互、以太网接收并上传视频数据等,具备无线传输功能wifi\4g\5g以及ahd视频解码功能,可以进行人机交互彩色液晶、视频显示、参数显示、视频参数叠加显示、红外遥控、按键、触摸屏、喇叭等,另外,用户可以调取历史记录,显示历史视频图像信息,支持网络传输和本地复制。
25.电源控制器6具备6路本安电源输出能力以及3路非安有源开出功能,为电控系统提供电力支持,6路本安电源输出dc12v/1500ma,用于给机车电控系统中各个设备供电。同时,电源控制器6的3路非安有源接口,用于给车辆熄火、刹车、倒车使用。电源控制器6通过can通信接口接收到的数据,根据协议解析来判断是否控制对应输出接口。
26.智能控制终端5可以对音频信号进行编码和解码,例如,可以采集mic接口的模拟信号进行编码,转换成pcm/i2s数字信号,再将pcm/i2s数字音频信号解码成模拟信号,发送给音频功放电路,音频功放电路可以对输出的音频信号进行放大,驱动10w喇叭进行扩音播放。智能控制终端5能够实现对数字音频数据的编码传输和mic输入和扬声器放音的控制,根据不同的业务状态,控制line总线或can总线传输对应的音频数据,同时本地解析播放对应的音频信息,上传mic采集的声音信息。
27.在本实施例中,摄像头7为720p高清模拟摄像头,数量为1-4个。摄像头7是通过被摄物体反射光线,传播到镜头,经镜头聚焦到cmos图像传感器上,cmos图像传感器根据光的强弱积聚相应的电荷,经周期性放电,产生表示一幅幅画面的电信号,经图像信号处理isp芯片线性纠正、噪声去除、坏点去除、内插、白平衡、自动曝光控制等将电信号转为图像,最后输出ahd高清模拟视频信号。
28.在本实施例中,毫米波雷达8的数量为1-2个,超声波雷达9的数量为1-4个。毫米波雷达8基于多普勒效应原理进行测距,当发射的电磁波和被探测目标有相对移动,回波的频率会和发射波的频率不同,根据发射脉冲和接收的时间差,可以测出目标的距离。超声波雷达9发射的是40khz的机械波,发射频率和接收频率是一样的,通过发射时间和接收时间差来测算距离障碍物的距离。
29.本实施例通过摄像头7将模拟图像ahd信号输入到辅助驾驶计算主机2,使用超声波雷达9实现近距离探测,使用毫米波雷达8实现远距离探测,辅助驾驶计算主机2通过显示器4实现人机交互,使得本电控系统具有行车影像记录、防碰撞预警、盲区监测、泊车辅助等功能。
30.综上,本实用新型的矿用无轨胶轮车的电控系统,通过数据采集器1、辅助驾驶计算主机2、灯光控制装置3、显示器4、智能控制终端5、电源控制器6、摄像头7、毫米波雷达8及超声波雷达9的结合,能够使得电控系统满足行业标准,具备多种功能。通过数据采集器1可以监测车辆和环境参数,通过显示器4使得具备仪表显示界面和全景影像显示,也能够显示
数据采集器采集到的参数。通过灯光控制装置3使得具备车灯自诊断功能、刹车、倒车自动控制功能、多路本安电源输出能力、多路非安控制开出能力。通过摄像头7、毫米波雷达8及超声波雷达9使得整车布置四个低照度摄像头就能够具备车辆周围全景影像,近距离探测使用超声波雷达,探测距离为0.2-5m,远距离探测使用毫米波雷达,探测距离为1-40m。通过灯光控制装置3的本安面板旋钮或手柄控制非安继电器箱,使得操纵部件更符合驾驶习惯,刹车、倒车灯光及信号可以自动控制,车灯状态具备自诊断功能。相比目前的倒车影像及雷达测距,全景影像更加直观地观察车辆周围状态,超声波雷达通过选型可以测距到5m范围内,毫米波雷达测距可达40m。
31.以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要如权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1