一种基于巡航的预见性空挡滑行控制系统及方法与流程
1.本发明属于车辆电控技术领域,具体涉及一种基于巡航的预见性空挡滑行控制系统及方法。
背景技术:
2.目前,国内许多商用车已经配备了自动变速器,并且支持车辆巡航状态时自动空挡滑行,但此种空挡滑行方式的主要判断条件为当前的车辆状态与当前的道路坡度,不具有预见性。少数变速器可基于地图信息提前换挡,其空挡滑行具有一定预见性,但滑行条件多为试验标定得到,滑行时机不够准确,不能充分利用车辆惯性,造成不必要的燃油消耗。此为现有技术的不足之处。
3.有鉴于此,本发明提供一种基于巡航的预见性空挡滑行控制系统及方法;以解决现有技术中存在的上述技术问题,是非常有必要的。
技术实现要素:
4.本发明的目的在于,针对上述现有技术存在的缺陷,提供设计一种基于巡航的预见性空挡滑行控制系统及方法,以解决上述技术问题。
5.为实现上述目的,本发明给出以下技术方案:
6.一种基于巡航的预见性空挡滑行控制系统,包括:
7.驾驶辅助地图控制器、发动机控制器、自动变速器控制器、变速执行机构,所述的驾驶辅助地图控制器连接所述的自动变速器控制器,所述的自动变速器控制器连接所述的发动机控制器和变速执行机构;所述的自动变速器控制器内集成设置有预见性空挡滑行模块;
8.所述的预见性空挡滑行模块从驾驶辅助地图控制器获取前方道路数据信息,预见性空挡滑行模块从发动机控制器获取实时车速信号数据、巡航激活状态数据、巡航设定车速数据,预见性空挡滑行模块从自动变速器控制器获取整车质量数据和挡位信号数据;
9.预见性空挡滑行模块从驾驶辅助地图控制器获取前方道路数据信息包括:车辆距前方坡顶的距离数据、上坡的平均坡度数据、坡顶后的下坡长度数据、坡顶后的下坡平均坡度数据;
10.预见性空挡滑行模块根据读取到的数据进行判断,如果满足以下条件时:
11.整车质量大于第一阈值,车辆距前方坡顶的距离小于第二阈值,坡顶后的下坡长度大于第三阈值,坡顶后的下坡平均坡度小于第四阈值,实时车速大于巡航设定车速减第五阈值;
12.则进行坡顶前车辆空挡滑行能力预测;
13.所述的坡顶前车辆空挡滑行能力预测基于动能定理与车辆动力学模型,不断计算当前实时车速下车辆空挡滑行至实时车速等于巡航设定车速减第五阈值时消耗的动能,以及车辆从当前位置空挡滑行至坡顶位置行驶阻力所做的功,当前者消耗的动能大于后者所
做的功时,预见性空挡滑行模块发出空挡命令控制自动变速器进入空挡;
14.当车辆空挡滑行通过坡顶至下坡道路后,实时车速超过巡航设定车速加第六阈值,或坡顶后的下坡平均坡度大于第四阈值且实时车速小于巡航设定车速减第五阈值时,预见性空挡滑行模块发出进挡命令控制自动变速器进入前进挡。
15.作为优选,预见性空挡滑行模块通过can总线从驾驶辅助地图控制器获取前方道路数据信息。
16.作为优选,坡顶前车辆空挡滑行能力预测的具体方式如下:
17.计算车辆空挡滑行至坡顶消耗的动能,根据动能定理:
[0018][0019]
其中,v0为车辆初速度,v
t
为车辆到达坡顶的车速,v
t
为巡航设定车速减第五阈值;
[0020]
计算车辆空挡滑行至坡顶行驶阻力做功,根据车辆动力学模型:
[0021]
车辆行驶阻力为:
[0022][0023]
其中,坡度α为车辆所处位置到坡顶路段的平均坡度,μ为滚动阻力系数,cd为风阻系数,二者作为整车参数通过前期车辆滑行试验得到,a为车辆迎风面积,v为等式(1)中v0与v
t
的平均值;
[0024]
则行驶阻力做功为:
[0025]
wn=fn:*s
ꢀꢀꢀ
(3)
[0026]
s为车辆距前方坡顶的距离。
[0027]
本发明还提供一种基于巡航的预见性空挡滑行控制方法,包括以下步骤:
[0028]
步骤s1:激活巡航,读取车辆前方道路数据信息;
[0029]
步骤s2:获取实时车速信号数据、巡航激活状态数据、巡航设定车速数据以及整车质量数据和挡位信号数据;
[0030]
步骤s3:根据步骤s1和步骤s2中获取的数据,当数据符合预设条件时,进入步骤s4以启动坡顶前车辆空挡滑行能力预测;
[0031]
步骤s4:坡顶前车辆空挡滑行能力预测:基于动能定理与车辆动力学模型,不断计算当前实时车速下车辆空挡滑行至实时车速等于巡航设定车速减第五阈值时消耗的动能,以及车辆从当前位置空挡滑行至坡顶位置行驶阻力所做的功,当前者消耗的动能大于后者所做的功时,预见性空挡滑行模块发出空挡命令控制自动变速器进入空挡。
[0032]
作为优选,所述步骤s1中,通过驾驶辅助地图控制器获取前方道路数据信息,所述的前方道路数据信息包括:车辆距前方坡顶的距离数据、上坡的平均坡度数据、坡顶后的下坡长度数据、坡顶后的下坡平均坡度数据。
[0033]
作为优选,所述步骤s3中,预设条件为:
[0034]
整车质量大于第一阈值,车辆距前方坡顶的距离小于第二阈值,坡顶后的下坡长度大于第三阈值,坡顶后的下坡平均坡度小于第四阈值,实时车速大于巡航设定车速减第五阈值。
[0035]
作为优选,所述的控制方法在步骤s4之后还包括以下步骤:
[0036]
步骤s5:当车辆空挡滑行通过坡顶至下坡道路后,实时车速超过巡航设定车速加第六阈值,或坡顶后的下坡平均坡度大于第四阈值且实时车速小于巡航设定车速减第五阈值时,预见性空挡滑行模块发出进挡命令控制自动变速器进入前进挡。
[0037]
作为优选,所述步骤s4中,坡顶前车辆空挡滑行能力预测的具体步骤如下:
[0038]
计算车辆空挡滑行至坡顶消耗的动能,根据动能定理:
[0039][0040]
其中,v0为车辆初速度,v
t
为车辆到达坡顶的车速,v
t
为巡航设定车速减第五阈值;
[0041]
计算车辆空挡滑行至坡顶行驶阻力做功,根据车辆动力学模型:
[0042]
车辆行驶阻力为:
[0043][0044]
其中,坡度α为车辆所处位置到坡顶路段的平均坡度,μ为滚动阻力系数,cd为风阻系数,二者作为整车参数通过前期车辆滑行试验得到,a为车辆迎风面积,v为等式(1)中v0与v
t
的平均值;
[0045]
则行驶阻力做功为:
[0046]
wn=fn*s
ꢀꢀꢀ
(3)
[0047]
s为车辆距前方坡顶的距离。
[0048]
本发明的有益效果在于,本技术技术方案能够使车辆以巡航状态在起伏道路行驶时,在到达坡顶前激活空挡滑行,并通过理论计算方式相对精准的控制车辆空挡滑行至坡顶的车速,充分利用了车辆惯性,可降低燃油消耗。
[0049]
此外,本发明设计原理可靠,结构简单,具有非常广泛的应用前景。
[0050]
由此可见,本发明与现有技术相比,具有突出的实质性特点和显著地进步,其实施的有益效果也是显而易见的。
附图说明
[0051]
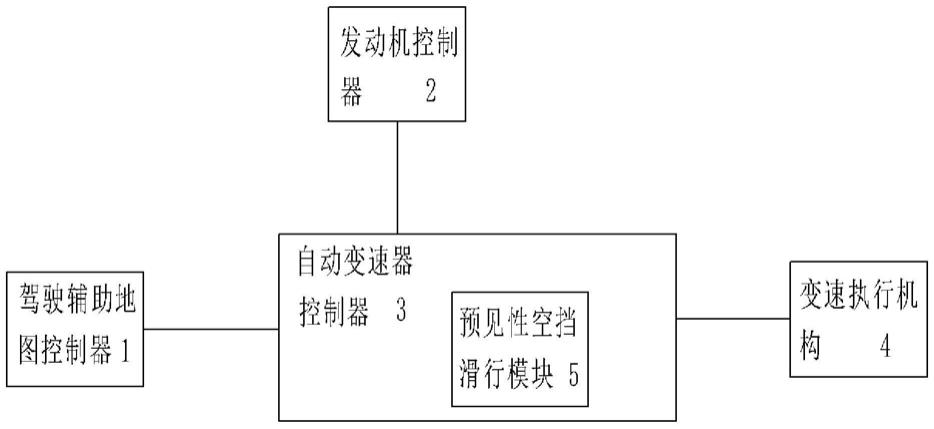
图1是本发明提供的一种基于巡航的预见性空挡滑行控制系统的原理框图。
[0052]
其中,1-驾驶辅助地图控制器,2-发动机控制器,3-自动变速器控制器,4-变速执行机构,5-预见性空挡滑行模块。
具体实施方式
[0053]
下面结合附图并通过具体实施例对本发明进行详细阐述,以下实施例是对本发明的解释,而本发明并不局限于以下实施方式。
[0054]
实施例1:
[0055]
如图1所示,本实施例提供的一种基于巡航的预见性空挡滑行控制系统,包括:
[0056]
驾驶辅助地图控制器1、发动机控制器2、自动变速器控制器3、变速执行机构4,所述的驾驶辅助地图控制器1连接所述的自动变速器控制器3,所述的自动变速器控制器3连接所述的发动机控制器2和变速执行机构4;所述的自动变速器控制器3内集成设置有预见性空挡滑行模块5;
[0057]
所述的预见性空挡滑行模块5从驾驶辅助地图控制器1获取前方道路数据信息,预见性空挡滑行模块5从发动机控制器2获取实时车速信号数据、巡航激活状态数据、巡航设定车速数据,预见性空挡滑行模块5从自动变速器控制器3获取整车质量数据和挡位信号数据;
[0058]
预见性空挡滑行模块从驾驶辅助地图控制器获取前方道路数据信息包括:车辆距前方坡顶的距离数据、上坡的平均坡度数据、坡顶后的下坡长度数据、坡顶后的下坡平均坡度数据;预见性空挡滑行模块5通过can总线从驾驶辅助地图控制器获取前方道路数据信息。
[0059]
预见性空挡滑行模块根据读取到的数据进行判断,如果满足以下条件时:
[0060]
整车质量大于第一阈值,车辆距前方坡顶的距离小于第二阈值,坡顶后的下坡长度大于第三阈值,坡顶后的下坡平均坡度小于第四阈值,实时车速大于巡航设定车速减第五阈值;
[0061]
则进行坡顶前车辆空挡滑行能力预测;
[0062]
所述的坡顶前车辆空挡滑行能力预测基于动能定理与车辆动力学模型,不断计算当前实时车速下车辆空挡滑行至实时车速等于巡航设定车速减第五阈值时消耗的动能,以及车辆从当前位置空挡滑行至坡顶位置行驶阻力所做的功,当前者消耗的动能大于后者所做的功时,预见性空挡滑行模块发出空挡命令控制自动变速器进入空挡;
[0063]
当车辆空挡滑行通过坡顶至下坡道路后,实时车速超过巡航设定车速加第六阈值,或坡顶后的下坡平均坡度大于第四阈值且实时车速小于巡航设定车速减第五阈值时,预见性空挡滑行模块发出进挡命令控制自动变速器进入前进挡。
[0064]
坡顶前车辆空挡滑行能力预测的具体方式如下:
[0065]
计算车辆空挡滑行至坡顶消耗的动能,根据动能定理:
[0066][0067]
其中,v0为车辆初速度,v
t
为车辆到达坡顶的车速,v
t
为巡航设定车速减第五阈值;
[0068]
计算车辆空挡滑行至坡顶行驶阻力做功,根据车辆动力学模型:
[0069]
车辆行驶阻力为:
[0070][0071]
其中,坡度α为车辆所处位置到坡顶路段的平均坡度,μ为滚动阻力系数,cd为风阻系数,二者作为整车参数通过前期车辆滑行试验得到,a为车辆迎风面积,v为等式(1)中v0与v
t
的平均值;
[0072]
则行驶阻力做功为:
[0073]
wn=fn*s
ꢀꢀꢀ
(3)
[0074]
s为车辆距前方坡顶的距离。
[0075]
实施例2:
[0076]
本实施例提供一种基于巡航的预见性空挡滑行控制方法,包括以下步骤:
[0077]
步骤s1:激活巡航,读取车辆前方道路数据信息;通过驾驶辅助地图控制器获取前方道路数据信息,所述的前方道路数据信息包括:车辆距前方坡顶的距离数据、上坡的平均
坡度数据、坡顶后的下坡长度数据、坡顶后的下坡平均坡度数据。
[0078]
步骤s2:获取实时车速信号数据、巡航激活状态数据、巡航设定车速数据以及整车质量数据和挡位信号数据;
[0079]
步骤s3:根据步骤s1和步骤s2中获取的数据,当数据符合预设条件时,进入步骤s4以启动坡顶前车辆空挡滑行能力预测;预设条件为:
[0080]
整车质量大于第一阈值,车辆距前方坡顶的距离小于第二阈值,坡顶后的下坡长度大于第三阈值,坡顶后的下坡平均坡度小于第四阈值,实时车速大于巡航设定车速减第五阈值。
[0081]
步骤s4:坡顶前车辆空挡滑行能力预测:基于动能定理与车辆动力学模型,不断计算当前实时车速下车辆空挡滑行至实时车速等于巡航设定车速减第五阈值时消耗的动能,以及车辆从当前位置空挡滑行至坡顶位置行驶阻力所做的功,当前者消耗的动能大于后者所做的功时,预见性空挡滑行模块发出空挡命令控制自动变速器进入空挡。
[0082]
步骤s5:当车辆空挡滑行通过坡顶至下坡道路后,实时车速超过巡航设定车速加第六阈值,或坡顶后的下坡平均坡度大于第四阈值且实时车速小于巡航设定车速减第五阈值时,预见性空挡滑行模块发出进挡命令控制自动变速器进入前进挡。
[0083]
所述步骤s4中,坡顶前车辆空挡滑行能力预测的具体步骤如下:
[0084]
计算车辆空挡滑行至坡顶消耗的动能,根据动能定理:
[0085][0086]
其中,v0为车辆初速度,v
t
为车辆到达坡顶的车速,v
t
为巡航设定车速减第五阈值;
[0087]
计算车辆空挡滑行至坡顶行驶阻力做功,根据车辆动力学模型:
[0088]
车辆行驶阻力为:
[0089][0090]
其中,坡度α为车辆所处位置到坡顶路段的平均坡度,μ为滚动阻力系数,cd为风阻系数,二者作为整车参数通过前期车辆滑行试验得到,a为车辆迎风面积,v为等式(1)中v0与v
t
的平均值;
[0091]
则行驶阻力做功为:
[0092]
wn=fn*s
ꢀꢀꢀ
(3)
[0093]
s为车辆距前方坡顶的距离。
[0094]
以上公开的仅为本发明的优选实施方式,但本发明并非局限于此,任何本领域的技术人员能思之的没有创造性的变化,以及在不脱离本发明原理前提下所作的若干改进和润饰,都应落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1