一种飞机刹车系统的接地保护控制方法与流程
1.本发明涉及但不限于飞机刹车技术领域,尤指一种飞机刹车系统的接地保护控制方法。
背景技术:
2.飞机刹车系统为飞机机电系统重要的组成部分,主要实现用于飞机着陆与滑跑阶段的刹车功能,缩短飞机滑跑距离。飞机刹车系统一般均拥有正常着陆刹车功能、起飞线刹车功能、应急刹车功能、起落架收起刹车功能、轮间保护功能、故障检测功能、接地保护功能、防滑功能等通用性功能。其中接地保护功能是飞机刹车系统不可或缺的功能之一,接地保护功能的实现方式通常为:通过飞机轮载状态、飞机速度等信号判断飞机空地状态,用来避免飞机着陆前带刹车压力所导致的安全性问题和轮胎磨损。
3.目前我国飞机刹车系统中常用的接地保护控制逻辑为:当判断前轮载信号指示为地面状态或左右轮速任一超过45
0+5
km/h,防滑刹车控制盒认为飞机已可靠接地,可以执行正常刹车功能,防滑刹车控制盒输出与刹车指令信号相对应的伺服阀控制信号;否则,即使驾驶员在空中误踩脚蹬而发出刹车指令信号,接地保护功能可保证防滑刹车控制盒输出静态电流,保证飞机刹车系统的刹车压力为回油压力。此功能可以防止飞机带压力着陆(带刹车着陆),提高刹车系统使用的安全性。上述左、右轮速判断为一次有效,即满足左右轮速任一超过45
0+5
km/h条件后,防滑刹车控制盒判断飞机已接地,直至飞机刹车系统重启后重新判断。
4.然而,上述现有接地保护控制逻辑以下弊端:由于目前左、右轮速判断为一次有效,在判断出一次有效后,则无法保证飞机复飞后接地保护功能可用。
技术实现要素:
5.本发明的目的:本发明实施例提供一种飞机刹车系统的接地保护控制方法,以解决现有接地保护控制方式,由于对空地状态的判断为一次有效,而导致无法保证飞机复飞后接地保护功能可用的问题。
6.本发明的技术方案为:本发明实施例提供一种飞机刹车系统的接地保护控制方法,包括:所述飞机刹车系统中,前轮载信号通过硬线引入防滑刹车控制盒,且左、右轮载信号分别通过总线引入防滑刹车控制盒,所述接地保护控制方法包括:
7.步骤1,判断防滑刹车控制盒的总线是否正常通讯;
8.步骤2,在判断出总线通讯故障时,防滑刹车控制盒通过硬线采集前轮载信号,并采集左、右轮速信号;
9.步骤3,根据硬线采集的前轮载信号,对前轮载状态进行判断;
10.步骤4,根据判断出的前轮载状态或采集的左、右轮速信号,判断飞机当前的空地状态,并根据飞机当前的空地状态执行接地保护控制策略;其中,飞机当前的空地状态包括:飞机当前已可靠接地、飞机始终处于地面状态和飞机当前处于空中状态。
11.可选地,如上所述的飞机刹车系统的接地保护控制方法中,所述防滑刹车控制盒中设置有用于实现接地保护功能的防滑刹车控制模块(bcu)安装在机电系统的机电管理计算机(umc)内部;
12.所述防滑刹车控制模块的功能包含:刹车功能、防滑控制、起飞线停机刹车及停机刹车保护、收起落架刹车、接地保护功能、轮间保护功能、防滑低速失效功能、液压电磁阀控制功能、双余度功能、bit检测及告警功能。
13.可选地,如上所述的飞机刹车系统的接地保护控制方法中,
14.所述防滑刹车控制模块(bcu),用于通过硬线采集的前轮载信号;
15.所述机电管理计算机(umc),用于通过总线向防滑刹车控制盒发送左、右轮载信号。
16.可选地,如上所述的飞机刹车系统的接地保护控制方法中,所述步骤4中判断飞机当前空地状态的方式,包括:
17.在判断出前轮载状态处于承载状态,或实时判断出左、右轮速信号的其中一个大于45
+05
km/h时,判断出飞机当前已可靠接地;
18.在判断出前轮载状态处于承载状态持续8s,判断出飞机始终处于地面状态;
19.在判断出前轮载状态处于未承载,且实时判断出左、右轮速信号均小于或等于45
+05
km/h时,判断出飞机当前处于空中状态。
20.可选地,如上所述的飞机刹车系统的接地保护控制方法中,所述步骤4具体包括:
21.步骤41,在判断前轮载状态处于承载状态时,对前轮载承载状态计时;
22.步骤42,判断前轮载承载状态计时是否大于8s;
23.步骤43,在判断出计时大于8s时,将前轮载状态锁定为地面状态,则判断出飞机始终处于地面状态;
24.步骤44,在判断出计时未大于8s、且在实时判断出左、右轮速信号的其中一个信号大于45
+05
km/h时,判断出飞机当前已可靠接地;
25.步骤45,在判断前轮载状态处于未承载时,且在实时判断出左、右轮速信号均小于或等于45
+05
km/h时,判断出飞机当前处于空中状态。
26.可选地,如上所述的飞机刹车系统的接地保护控制方法中,所述步骤4中执行接地保护控制策略,包括:
27.在判断出飞机当前已可靠接地时,解除接地保护功能;
28.在判断出飞机始终处于地面状态时,持续解除接地保护功能,直至通讯恢复正常或重新上电;
29.在判断出飞机当前处于空中状态时,保持接地保护功能。
30.可选地,如上所述的飞机刹车系统的接地保护控制方法中,还包括:
31.步骤5,在判断出总线通讯正常时,防滑刹车控制盒通过硬线采集前轮载信号,通过总线接收左、右轮载信号,并且采集左、右轮速信号;
32.步骤6,根据采集到的三个轮载信号进行飞机空地状态判断;或者,通过采集到的左、右轮速信号,对左、右轮速状态实时判断。
33.可选地,如上所述的飞机刹车系统的接地保护控制方法中,所述步骤6包括:
34.根据前轮载信号和左、右轮载信号中两个轮载信号的承载状态时,判断飞机是否
处于承载状态(任意两个轮载信号指示为承载状态时,判断当前飞机已接地);或者,根据左、右轮速信号,对左、右轮速状态实时判断,以判断当前飞机是否已接地;
35.在判断出飞机处于接地状态时,解除接地保护功能;在在判断出飞机处于空中状态时,保持接地保护功能。
36.本发明的有益效果为:本发明实施例提供一种飞机刹车系统的接地保护控制方法,设计新的接地保护控制逻辑如下:接地保护功能中,左、右轮速信号判断实时有效;如果飞机刹车系统与机电系统间总线通讯故障,则飞机轮载按前轮载状态进行判断,如果前轮载有效即解除接地保护功能,否则保持接地保护功能。采用本发明实施例提供的接地保护控制方法,可以通过仅更改防滑刹车控制盒的软件,而不对刹车系统甚至机电系统采集信号进行更改的方式完成接地保护功能的优化;该接地保护控制方法,既能避免飞机复飞导致飞机再次着陆时可能出现的带压着陆危险,又能有效避免低速段时轮载采集故障带来的无刹车压力输出隐患。
附图说明
37.附图用来提供对本发明技术方案的进一步理解,并且构成说明书的一部分,与本技术的实施例一起用于解释本发明的技术方案,并不构成对本发明技术方案的限制。
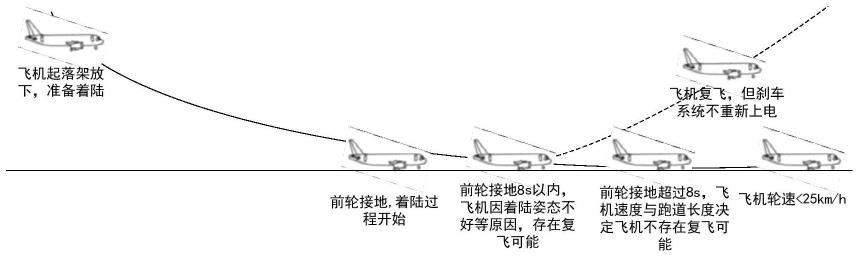
38.图1为飞机着陆过程的示意图;
39.图2为现有技术中优化后的轮载采集信号的示意图;
40.图3为本发明实施例提供的飞机刹车系统的接地保护控制方法的流程图。
具体实施方式
41.为使本发明的目的、技术方案和优点更加清楚明白,下文中将结合附图对本发明的实施例进行详细说明。需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互任意组合。
42.上述背景技术中已经说明,现有接地保护控制逻辑中,由于左、右轮速判断为一次有效,在判断出一次有效后,则无法保证飞机复飞后接地保护功能可用。
43.若将该现有接地保护控制逻辑得一次有效判断更改为左、右轮速实时判断的方式,则当飞机处于低速段(45
0+5
km/h)滑行时,若因飞机轮载采集故障导致飞机前轮载误判为空中或飞机颠簸导致前轮载瞬时处于空中时,飞机刹车系统无法输出刹车压力,则飞机刹车系统丧失正常刹车能力。
44.针对上述现有接地保护控制逻辑所存在的问题,本发明实施例提供一种飞机刹车系统的接地保护控制方法,不仅能够避免飞机着陆前带刹车压力所导致的安全性问题和轮胎磨损,还可以进一步提高低速段时飞机刹车工作的可靠性与安全性,避免轮载采集故障带来的无刹车压力输出隐患。
45.本发明提供以下几个具体的实施例可以相互结合,对于相同或相似的概念或过程可能在某些实施例不再赘述。
46.图1为飞机着陆过程的示意图。如图1所示,飞机刹车系统的接地保护控制逻辑为刹车系统重要组成功能之一,其判断依据主要为判断飞机轮载在地面或左右轮速任一超过45
0+5
km/h,则认为飞机已可靠接地,解除接地保护功能。目前我国飞机刹车系统判断飞机轮
载状态的方式主要有以下两种:
47.1)使用硬线采集的前轮载信号作为飞机轮载信号为判断依据;
48.2)在方法1的基础上进行优化,使用硬线采集的前轮载信号与机电系统由总线发送的左、右轮载信号综合判断,其中3个轮载信号中任意2个轮载信号指示处于承载状态,则认为飞机处于承载状态。如图2所示,为现有技术中优化后的轮载采集信号的示意图。
49.不论是采用上述第一种飞机轮载信号的判断方式,还是采用上述第二种飞机轮载信号的判断方式,当机电系统与刹车系统间总线通讯故障时,在飞机处于低速段(45
+05
km/h)滑行时,若飞机轮载采集故障导致飞机轮载误判为空中或飞机颠簸导致前轮载瞬时处于空中时,会导致飞机失去刹车功能。而由于轮载信号在传统飞机设计中大多只有前轮载信号由硬线信号引入刹车系统,所以在现有飞机基础上扩展为三个轮载信号由硬线引入刹车系统以避免单点故障需要进行的改动过大。
50.本发明实施例提供的接地保护控制方法为针对飞机刹车系统中设计的,飞机刹车系统中,前轮载信号通过硬线引入防滑刹车控制盒,且左、右轮载信号分别通过总线引入防滑刹车控制盒。图3为本发明实施例提供的飞机刹车系统的接地保护控制方法的流程图。
51.参照图1和图3所示,本发明实施例提供的飞机刹车系统的接地保护控制方法,可以包括如下步骤:
52.步骤1,判断防滑刹车控制盒的总线是否正常通讯;
53.步骤2,在判断出总线通讯故障时,防滑刹车控制盒通过硬线采集前轮载信号,并采集左、右轮速信号;
54.步骤3,根据硬线采集的前轮载信号,对前轮载状态进行判断;
55.步骤4,根据判断出的前轮载状态或采集的左、右轮速信号,判断飞机当前的空地状态,并根据飞机当前的空地状态执行接地保护控制策略;其中,飞机当前的空地状态包括:飞机当前已可靠接地、飞机始终处于地面状态和飞机当前处于空中状态。
56.在本发明实施例的一种实现方式中,步骤4中判断飞机当前空地状态的方式,包括:
57.在判断出前轮载状态处于承载状态,或实时判断出左、右轮速信号的其中一个大于45
+05
km/h时,判断出飞机当前已可靠接地;
58.在判断出前轮载状态处于承载状态持续8s,判断出飞机始终处于地面状态;
59.在判断出前轮载状态处于未承载,且实时判断出左、右轮速信号均小于或等于45
+05
km/h时,判断出飞机当前处于空中状态。
60.该步骤4的具体实施过程可以包括:
61.步骤41,在判断前轮载状态处于承载状态时,对前轮载承载状态计时;
62.步骤42,判断前轮载承载状态计时是否大于8s;
63.步骤43,在判断出计时大于8s时,将前轮载状态锁定为地面状态,则判断出飞机始终处于地面状态;
64.步骤44,在判断出计时未大于8s、且在实时判断出左、右轮速信号的其中一个信号大于45
+05
km/h时,判断出飞机当前已可靠接地;
65.步骤45,在判断前轮载状态处于未承载时,且在实时判断出左、右轮速信号均小于或等于45
+05
km/h时,判断出飞机当前处于空中状态。
66.该实现方式中,如图3所示,步骤4中执行接地保护控制策略,可以包括:
67.在判断出飞机当前已可靠接地时,解除接地保护功能;
68.在判断出飞机始终处于地面状态时,持续解除接地保护功能,直至通讯恢复正常或重新上电;
69.在判断出飞机当前处于空中状态时,保持接地保护功能。
70.进一步地,本发明实施例的步骤1中,也可能判断出总线通讯为正常状态,如图3所示,本发明实施例提供过的接地保护控制方法,还可以包括:
71.步骤5,在判断出总线通讯正常时,防滑刹车控制盒通过硬线采集前轮载信号,通过总线接收左、右轮载信号,并且采集左、右轮速信号;
72.步骤6,根据采集到的三个轮载信号进行飞机空地状态判断(3选2表决);或者,通过采集到的左、右轮速信号,对左、右轮速状态实时判断。
73.该情况下,步骤6的具体判断方式为:
74.根据前轮载信号和左、右轮载信号中两个轮载信号的承载状态时,判断飞机是否处于承载状态(任意两个轮载信号指示为承载状态时,判断当前飞机已接地);或者,根据左、右轮速信号,对左、右轮速状态实时判断,以判断当前飞机是否已接地;
75.在判断出飞机处于接地状态时,解除接地保护功能;在在判断出飞机处于空中状态时,保持接地保护功能。
76.本发明实施例提供的飞机刹车系统的接地保护控制方法,设计新的接地保护控制逻辑如下:接地保护功能中,左、右轮速信号判断实时有效;如果飞机刹车系统与机电系统间总线通讯故障,则飞机轮载按前轮载状态进行判断,如果前轮载有效即解除接地保护功能,否则保持接地保护功能。以现有技术中优化后的轮载判断方式为例,采用本发明实施例提供的新的接地保护控制逻辑,如果前轮载信号指示为承载状态持续8s,则认为飞机始终处于地面状态,解除接地保护功能,直至通讯恢复正常或重新上电。
77.采用本发明实施例提供的接地保护控制方法,原因为在飞机着陆过程(见图1)中,当飞机前轮载信号指示承载状态8s内,飞机可能因为着陆姿态不好等原因复飞,但在再次降落过程中不会使刹车系统重新上电,所以若左、右轮速信号判断一次有效,会导致飞机再次着陆时有因为飞行员误操作导致带压着陆的风险。而当飞机前轮载信号指示承载8s以后,飞机速度和跑道长度决定飞机不存在复飞可能,则可以认为飞机始终处于地面状态。故设定前轮载信号的锁定时间确定为8s,能够在避免低速段时轮载采集故障带来的无刹车压力输出隐患的同时,保证飞机安全。
78.进一步的,采用本发明实施例提供的接地保护控制方法,可以通过仅更改防滑刹车控制盒的软件,而不对刹车系统甚至机电系统采集信号进行更改的方式完成接地保护功能的优化;该接地保护控制方法,既能避免飞机复飞导致飞机再次着陆时可能出现的带压着陆危险,又能有效避免低速段时轮载采集故障带来的无刹车压力输出隐患。
79.以下通过一个具体实施例对本发明实施例提供的飞机刹车系统的接地保护控制方法的实现方式进行详细说明。
80.该具体实施例中,采用防滑刹车控制盒执行接地保护控制方法;该防滑刹车控制盒中设置有用于实现接地保护功能的防滑刹车控制模块(bcu)安装在机电系统的机电管理计算机(umc)内部。
81.该防滑刹车控制模块用于接收刹车指令传感器信号,控制电液压力伺服阀输出的刹车压力,从而实现电传刹车功能;同时它接收机轮速度传感器信号,检测机轮的滑动状态,调节电液压力伺服阀输出的刹车压力,适时解除机轮的打滑,从而提高刹车效率,缩短着陆滑跑距离,减小轮胎磨损,保证飞机刹车安全。防滑刹车控制模块的主要功能包含:刹车功能、防滑控制、起飞线停机刹车及停机刹车保护、收起落架刹车、接地保护功能、轮间保护功能、防滑低速失效功能、液压电磁阀控制功能、双余度功能、bit检测及告警功能。
82.该该实施例中,接地保护功能所使用的飞机轮载采集方式为使用bcu硬线采集的前轮载信号与umc由总线发送的左、右主轮载信号综合判断,其中3轮载中任意2轮处于承载状态,则认为飞机处于承载状态,综合轮载承载。轮载采集示意图见图2。
83.该实施例中,接地保护功能流程框图见图3,控制方法描述如下:当bcu与umc通信正常时,判断综合轮载在地面或左右轮速任一超过45
+05
km/h(实时判断),则认为飞机已可靠接地,解除接地保护功能。
84.当bcu与umc总线通讯故障时,判断前轮载状态在地面或左、右轮速信号中任一超过45
+05
km/h(实时判断),则认为飞机已可靠接地,解除接地保护功能。如果前轮载承载状态持续8s,则认为飞机始终处于地面状态,持续解除接地保护功能,直至通讯恢复正常或重新上电。
85.虽然本发明所揭露的实施方式如上,但所述的内容仅为便于理解本发明而采用的实施方式,并非用以限定本发明。任何本发明所属领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化,但本发明的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1