一种用于自动驾驶车辆整车控制的执行方法与流程
1.本发明涉及自动驾驶技术领域,尤其是涉及一种用于自动驾驶车辆整车控制的执行方法。
背景技术:
2.目前,自动驾驶技术分为感知定位、决策规划和控制执行三大技术模块。其中,感知定位技术模块用以获取自动驾驶的环境信息,获取的方式主要通过雷达和摄像头等传感器,决策规划技术模块用以依据感知定位技术模块提供的定位和环境数据,进行路径的规划等决策,控制执行技术模块用以驱动车辆执行相应的命令动作。
3.现有技术中的自动驾驶的控制执行方法存在以下缺陷:
4.(1)现有技术中的用于自动驾驶车辆整车控制的执行方法对于轮胎横向和纵向摩擦系数以及附着力系数均为近似估计,无法自适应计算轮胎横纵向,对于复杂路况的适应度较差,严重限制了自动驾驶汽车的使用范围。
5.(2)现有技术中的用于自动驾驶车辆整车控制的执行方法与整车控制系统是分开的,控制执行方法需单独调用整车的控制系统,导致控制执行方法的执行时间过长。同时,整车控制系统有独立的功能安全要求,对于整体控制的可靠性有较大威胁。
6.(3)现有技术中的用于自动驾驶车辆整车控制的执行方法的建模均为一维刚形体建模,难以考虑整车的悬架阻尼、整车垂向振动、整车翻转运动、整车风阻等因素,导致现有控制执行方法的控制精度不足,增大控制执行方法控制发散的风险,对于扩大自动驾驶汽车的使用范围极为不利。
技术实现要素:
7.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种用于自动驾驶车辆整车控制的执行方法,该发明充分考虑整车阻尼、振动、底盘结构、风阻等因素,提高自动驾驶的控制执行方法的可靠性、时效性和精确性。
8.本发明的目的可以通过以下技术方案来实现:
9.本发明提供一种用于自动驾驶车辆整车控制的执行方法,包括以下步骤:
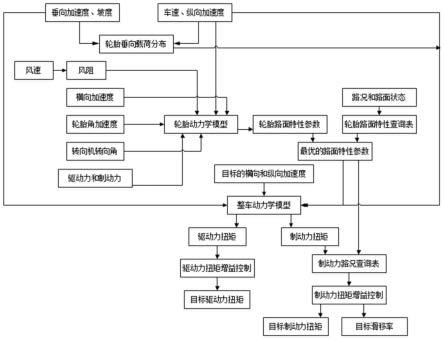
10.s1:获取风速和风阻,自动驾驶车辆的车速、垂向加速度、纵向加速度、横向加速度和车相对于地平线的坡度,以及自动驾驶车辆的每个轮胎的轮胎角加速度、转向机转向角、驱动力和制动力;
11.s2:获取轮胎垂向载荷分布计算表,将s1获取的垂向加速度、纵向加速度和坡度输入轮胎垂向载荷分布计算表,获取自动驾驶车辆所有轮胎的轮胎垂向载荷;
12.s3:将s1获取的车速、纵向加速度、风阻、横向加速度、轮胎角加速度、转向机转向角、驱动力和制动力以及s2获取的轮胎垂向载荷均输入轮胎动力学模型中,获取自动驾驶车辆每个轮胎的轮胎瞬时纵向力、轮胎瞬时横向力和回正力矩;
13.s4:根据s3求取的轮胎瞬时纵向力、轮胎瞬时横向力和回正力矩获取轮胎路面特
性参数,获取并根据自动驾驶车辆行驶的路况以及路面状态,对轮胎路面特性参数进行综合校准,进而获取最优的轮胎路面特征参数;
14.s5:获取目标的横向加速度和目标的纵向加速度,将s1获取的车速、垂向加速度、纵向加速度和坡度、s2获取的轮胎垂向载荷、s4获取的最终的轮胎路面特征参数以及目标的横向加速度和目标的纵向加速度输入整车动力学模型,获取制动力扭矩和驱动力扭矩;
15.s6:分别对s5获取的驱动力扭矩和制动力扭矩进行处理,获取并将目标驱动力扭矩输入驱动系统控制器,获取并将目标制动力扭矩和目标轮胎滑移率输入制动系统控制器中,驱动系统控制器和制动系统控制器驱动车辆执行相应的命令动作。
16.优选地,所述s2中轮胎垂向载荷分布计算表的获取方式包括通过人工神经网络对基于三维多体动力学仿真模型进行拟合以及通过试验数据多项式进行拟合。
17.优选地,所述s3中轮胎动力学模型的获取方式包括通过轮胎动力学方程和试验数据进行拟合修正。
18.优选地,所述s4包括以下步骤:
19.s4.1:将s3求取的轮胎瞬时纵向力、轮胎瞬时横向力和回正力矩代入轮胎魔术公式,求解轮胎路面特性参数;
20.s4.2:通过gps定位、车路互联通信和车联网通信获取路况,通过对天气状况的识别获取路面状态;
21.s4.3:获取并根据轮胎路面特性参数的查询表,再结合s4.2获取的路况和路面状态,对s4.1获取的轮胎路面特征参数进行校准,进而获取最优的轮胎路面特性参数。
22.优选地,所述轮胎路面特性参数包括横、纵向摩擦系数和附着力系数。
23.优选地,所述路况包括柏油路、砂石路和土路,路面状态包括湿滑、结冰、干燥和积雪。
24.优选地,所述s5中的整车动力学模型通过人工神经网络卷积整车多体动力学模型拟合获取。
25.优选地,所述s6具体包括以下步骤:
26.s6.1:对s5获取的驱动力扭矩进行增益控制,进而获取目标驱动扭矩,将目标驱动力扭矩输入驱动系统控制器;
27.s6.2:将s4获取的最优的轮胎路面特征参数和s5获取的制动力扭矩输入制动力路况查询表,获取制动力修正值和目标轮胎滑移率,根据制动力修正值修正制动力扭矩,再对修正后的制动力扭矩进行增益控制,进而获取目标制动扭矩,将目标制动力和目标滑移率输入至制动系统控制器中;
28.s6.3:所述驱动系统控制器和所述制动系统控制器均驱动车辆执行相应的命令动作。
29.优选地,所述增益控制的过程具体为:
30.将s5获取的驱动力扭矩或制动力扭矩按照缩放系数缩放,所述缩放系数通过标定获取。
31.优选地,所述制动力工况查询表需要标定制动力、制动能量回收比例和目标滑移率。
32.与现有技术相比,本发明具有以下优点:
33.1、本发明提供的一种用于自动驾驶车辆整车控制的执行方法,在计算获取轮胎路面特性参数后,结合路况和路面状态对轮胎路面特性参数进行综合校准,进而获取最优的轮胎路面特性参数,解决了现有技术中自动驾驶车辆对于复杂路况的适应度较差,严重限制了自动驾驶汽车的使用范围的问题。
34.2、本发明提供的一种用于自动驾驶车辆整车控制的执行方法,通过对驱动力扭矩和制动力扭矩进行增益控制,解决了现有技术中控制执行方法的执行时间过长的问题。
35.3、本发明提供的一种用于自动驾驶车辆整车控制的执行方法通过建立整车动力学模型,考虑整车的的悬架阻尼、整车垂向振动、整车翻转运动、整车风阻等因素,避免了现有技术中控制执行方法的控制精度不足的问题。
附图说明
36.图1为本实施例提供的一种用于自动驾驶车辆整车控制的执行方法的流程示意图。
具体实施方式
37.下面结合附图和具体实施例对本发明进行详细说明。
38.实施例
39.本实施例提供一种用于自动驾驶车辆整车控制的执行方法,包括以下步骤:
40.s1:获取风速和风阻,自动驾驶车辆的车速、垂向加速度、纵向加速度、横向加速度和车相对于地平线的坡度,以及自动驾驶车辆的每个轮胎的轮胎角加速度、转向机转向角、驱动力和制动力。
41.具体地,风速可以通过车联网和车路互联获取。
42.具体地,风阻的获取过程具体如下:
43.对风速分别进行自动驾驶车辆整车的侧向和纵向的矢量分解,根据整车阻力系数分别求解自动驾驶车辆整车的侧向风阻和纵向风阻,再根据整车三维风阻仿真拟合和试验标定表,获取整车的垂向风阻分力。
44.具体地,通过毫米波雷达测量的对地绝对速度获取车速,采用底盘垂向加速度传感器测量并滤波后获取垂向加速度,通过计算车速对时间的导数获取纵向加速度,采用整车横摆加速度传感器测量滤波后获取自动驾驶车辆的横向加速度,采用坡度传感器测量并滤波后获取坡度,分别对安装于每个轮胎上的转速传感器获取的测量值进行求导,获取每个轮胎的轮胎角加速度,通过转向机反馈的转向角度获取转向机转向角,通过驱动系统反馈的实际驱动力获取驱动力,通过制动系统反馈的实际制动力获取制动力。
45.s2:获取轮胎垂向载荷分布计算表,将s1获取的垂向加速度、纵向加速度和坡度输入轮胎垂向载荷分布计算表,获取自动驾驶车辆所有轮胎的轮胎垂向载荷。
46.具体地,轮胎垂向载荷分布计算表的获取方式包括通过人工神经网络对基于三维多体动力学仿真模型进行拟合以及通过试验数据多项式进行拟合。
47.s3:将s1获取的车速、纵向加速度、风阻、横向加速度、轮胎角加速度、转向机转向角、驱动力和制动力以及s2获取的轮胎垂向载荷均输入轮胎动力学模型中,获取自动驾驶车辆每个轮胎的轮胎瞬时纵向力、轮胎瞬时横向力和回正力矩。
48.具体地,通过轮胎动力学方程和试验数据的拟合修正获取轮胎动力学模型。
49.s4:根据s3求取的轮胎瞬时纵向力、轮胎瞬时横向力和回正力矩求解轮胎路面特性参数,获取并根据自动驾驶车辆行驶的路况以及路面状态,对轮胎路面特性参数进行综合校准,进而获取最优的轮胎路面特征参数。
50.s4.1:将s3求取的轮胎瞬时纵向力、轮胎瞬时横向力和回正力矩代入轮胎魔术公式,求解轮胎路面特性参数,轮胎路面特征参数包括横、纵向摩擦系数和附着力系数。
51.具体地,轮胎魔术公式的非路况相关参数由轮胎供应商提供。
52.s4.2:通过gps定位、车路互联通信和车联网通信获取路况,通过对天气状况的识别获取路面状态。
53.具体地,路况包括柏油路、砂石路和土路,路面状态包括湿滑、结冰、干燥和积雪。
54.作为一种可选的实施方式,可以通过自动驾驶车辆的感知识别模块对路面进行拍照和图像识别,进而识别该自动驾驶车辆行驶的路况以及路面状态。
55.s4.3:获取并根据轮胎路面特性参数的查询表,再结合s4.2获取的路况和路面状态,对s4.1获取的轮胎路面特征参数进行校准,进而获取最优的轮胎路面特性参数。
56.具体地,通过不同路面的轮胎试验获取轮胎路面特性参数的查询表,s4.3的目的是防止s5求解的轮胎路面的特征参数过于偏离实际。
57.s5:通过自动驾驶的决策算法获取目标的横向加速度和目标的纵向加速度,将s1获取的车速、垂向加速度、纵向加速度和坡度、s2获取的轮胎垂向载荷、s4获取的最终的轮胎路面特性参数以及目标的横向加速度和目标的纵向加速度输入整车动力学模型,获取目标的制动力扭矩和驱动力扭矩。
58.具体地,所述目标为自动驾驶车辆执行结果需要达到的标准。
59.具体地,整车动力学模型基于轮胎、悬挂、转向、制动系统等三维多体动力学仿真模型,然后采用卷积人工神经网络拟合变成数学公式,再经过整车底盘动力学试验(包含但不限于多路面转向、制动、极限加速、底盘操稳试验等等)标定修正,最后获取本发明的整车动力学模型。
60.s6:分别对s5获取的驱动力扭矩和制动力扭矩进行处理,获取并将目标驱动力扭矩输入驱动系统控制器,获取并将目标制动力扭矩和目标轮胎滑移率输入制动系统控制器中,驱动系统控制器和制动系统控制在接收到数据后驱动车辆执行相应的命令动作。
61.s6.1:对s5获取的驱动力扭矩进行增益控制,即对驱动力扭矩按照缩放系数缩放,进而获取目标驱动扭矩,将目标驱动力扭矩输入驱动系统控制器。
62.s6.2:将s4获取的最优的轮胎路面特征参数和s5获取的制动力扭矩输入制动力路况查询表,获取制动力修正值和目标轮胎滑移率,根据制动力修正值修正制动力扭矩,再对修正后的制动力扭矩进行增益控制,即对制动力扭矩按照缩放系数缩放,进而获取目标制动扭矩,将目标制动力和目标滑移率输入至制动系统控制器中。
63.具体地,缩放系数通过标定获取,不同驱动形式标定表有较大区别,不同制动结构标定表有较大区别。
64.具体地,对驱动力扭矩和制动力扭矩进行增益控制可以提高驱动力扭矩和制动力扭矩的响应速度。
65.具体地,制动力工况查询表需要标定制动力、制动能量回收比例和目标滑移率。
66.s6.3:驱动系统控制器和制动系统控制器均驱动车辆执行相应的命令动作。
67.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思做出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1