一种架空乘人装置越位保护系统的制作方法
1.本实用新型属于煤矿用机械设备技术领域,具体为一种架空乘人装置越位保护系统。
背景技术:
2.矿用架空索道是一种矿山地面及井下(平)斜巷人员输送设备,煤矿称之为“架空乘人装置”,并俗称“猴车”。架空乘人装置时煤矿井下运送工作人员的首选设备,属于无极绳运输系统,主要由驱动部分、线路部分、尾轮部分、张紧部分及电控系统组成。它具有人员运输量大、运行安全可靠、人员静止上下方便、随随行、不需等待、一次性投入低、动力消耗小、操作简单、便于维护、操作人员少等特点,是一种新型矿山高效运送人员的设备。
3.但是在使用索道的过程中,常由于人员睡着等情况,出现在该下车处没有下车,导致索道上人员越位的情况发生,通常为避免越位造成的安全隐患,在矿用架空乘人装置上配备有红外感应装置,用于检测越位的人员,一旦出现越位会使整个架空索道停止运行,从而影响整个架空索道的连续性工作。
技术实现要素:
4.本实用新型克服现有技术存在的不足,提供一种架空乘人装置越位保护系统,解决出现越位情况需要将架空乘人装置整体停车,从而影响工作进度的问题。
5.本实用新型是通过如下技术方案实现的。
6.一种架空乘人装置越位保护系统,包括架空乘人装置,所述架空乘人装置包括驱动部分和行走线路,以及连接在行走线路上的车体,所述车体通过抱索装置与行走线路相连接,还包括越位存车段,所述越位存车段包括设置在行走线路两侧的平行轨道,平行轨道的端部设置有内缩的导向轨道;所述抱索装置的两侧分别连接有滑轮,滑轮的轮距与导向轨道的距离相同,在车体行走至导向轨道时,在导向轨道的作用下用于将抱索装置打开,使抱索装置脱离行走线路进入平行轨道。
7.进一步的,所述抱索装置包括第一锁止件和第二锁止件,所述第一锁止件和第二锁止件用于夹紧所述行走线路。
8.进一步的,还包括压力感应装置和plc控制系统,所述压力感应装置设置在导向轨道处,压力感应装置和驱动部分与plc控制系统相连接,plc控制系统通过接收压力感应装置的电信号对驱动装置进行控制。
9.更进一步,所述导向轨道的前方设置有用于承载行走线路的驱动绳轮,驱动绳轮底部设置有弹簧装置,所述压力感应装置设置在驱动绳轮和弹簧装置之间。
10.本实用新型相对于现有技术所产生的有益效果为。
11.本实用新型相较于传统架空乘人装置越位保护系统,本系统能够将架空乘人装置上的越位人员从运行的行走线路上转运至越位存车段,此时,架空乘人装置不会停车,可以继续运行。该装置具有越位保护不停车、可以实现自动控制的优点。
附图说明
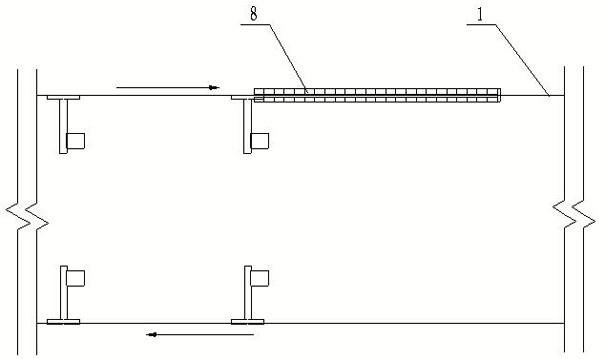
12.图1是本实用新型所述越位保护系统的侧视图。
13.图2是本实用新型所述越位保护系统的俯视图。
14.图3是抱索装置的结构示意图。
15.图4是驱动绳轮的结构示意图。
16.图5是平行轨道的俯视图。
17.图中1为钢丝绳、2为车体、3为抱索装置、4为第一锁止件、5为第二锁止件、6为连接杆、7为滑轮、8为越位存车段、9为平行轨道、10为导向轨道、11为压力传感器,12为驱动绳轮,13为弹簧装置。
具体实施方式
18.实施例1
19.如图1
‑
2所示,是一种架空乘人装置越位保护系统,包括架空乘人装置和越位存车段8,架空乘人装置包括用于驱动的绞车,用于行走的钢丝绳1,以及连接在钢丝绳1上的车体2,绞车设有防爆电动机,车体2通过抱索装置3与钢丝绳1相连接,如图3所示,抱索装置包括第一锁止件4和第二锁止件5,第一锁止件4和第二锁止件5件用于夹紧钢丝绳。在第一锁止件4和第二锁止件5上分别连接有连接杆6,连接杆6与滑轮7的驱动轴相连接;第一锁止件4和第二锁止件5之间通过销轴相连接,在外力的作用下,第一锁止件4和第二锁止件5可打开从而脱离钢丝绳1。
20.越位存车段8包括两根平行轨道9,两根平行轨道9分别设置在钢丝绳1的两侧,实用锚杆等支撑部件进行固定,平行轨道9的端部设置有内缩的导向轨道10;两个滑轮7的轮距与两个导向轨道10的距离相同,在车体2行走至导向轨道10时,滑轮7沿着导向轨道10进入平行轨道9,在导向轨道10的作用下,滑轮7通过连接杆6将第一锁止件4和第二锁止5打开,使抱索装置3脱离钢丝绳1进入越位存车段。
21.实施例2
22.一种自动控制的架空乘人装置越位保护系统,是在实施例1的基础上,增加压力传感器11和plc控制系统,导向轨道10的前方布置一个用于承载钢丝绳1的驱动绳轮12,如图4所示,驱动绳轮12底部的支架上固定有弹簧装置13,压力传感器11设置在驱动绳轮12和弹簧装置13之间。压力传感器11和防爆电动机的电磁阀与plc控制系统相连接,plc控制系统通过接收压力传感器11的电信号对电磁阀进行控制。
23.当有一位人员通过驱动绳轮12时,压力传感器计数为1,架空乘人装置继续运行,并将越位人员转运至越位存车段;当通过驱动绳轮12人员>1时,即压力传感器11计数为>1时,为避免是机械故障,架空乘人装置将停止运行,工作人员进行故障排除。通过这一套控制系统来实现架空乘人装置越位保护系统的自动控制。相较于传统架空乘人装置越位保护系统,本系统具有越位保护不停车、可以实现自动控制等优点。
24.以上内容是结合具体的优选实施方式对本实用新型所做的进一步详细说明,不能认定本实用新型的具体实施方式仅限于此,对于本实用新型所属技术领域的普通技术人员来说,在不脱离本实用新型的前提下,还可以做出若干简单的推演或替换,都应当视为属于本实用新型由所提交的权利要求书确定专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1