一种基于两侧导向机构的PRT车辆快速变轨系统的制作方法
一种基于两侧导向机构的prt车辆快速变轨系统
技术领域
1.本发明涉及一种基于两侧导向机构的prt车辆快速变轨系统。
背景技术:
2.空中轨道prt车辆是一种快速灵活的交通工具,轨道依托立柱架设在半空中,自动驾驶的prt车辆在轨道中行走。由于prt车辆具备自动驾驶功能,因此可以达到极高的发车密度,车头时距可以达到公路交通的级别,远超一般轨道交通形式。
3.一般车路模式的prt系统,需要建设混凝土高架桥梁,prt车辆采用传统乘用车的转向系统,使用车轮转向角度自主调整前进的方向,遇到复杂的路线情况,车辆在道路上不仅要控制纵向与其他车辆的距离,还要检测与调整自身横向位置,控制难度较大,存在一定程度的风险。车轨模式的prt系统,车辆的行驶方向依靠轨道进行导向,无论是通过曲线轨道还是道岔,prt车辆只需要控制纵向与前后车的距离,大大降低了系统的复杂程度。同时,对于中高运量需求的线路,架设更多的并行空中轨道是提高运量的有效方式之一。传统的变轨方式如cn113525423a中方案依靠prt车辆自主选择左转向或右转向,沿轨道导向方向行驶,需要切换到相邻的并行轨道上时,需要两次变换方向,如先左转向再右转向,连续两次通过道岔才能行驶进入相邻的轨道上。此时在通过两个道岔之间需要车辆完成转向动作的切换,在较短的两道岔间距离完成这个动作,控制难度大,安全风险高,即prt车辆切换轨道时需要先左转向再右转向,实际上两个轨道离得很近,没有足够的动作时间和安全距离。
技术实现要素:
4.发明目的:本发明目的为提供一种能提高变轨安全性的prt车辆快速变轨系统,该系统中prt车辆变轨时,只需要一次动作即可连续通过两个道岔,从而实现快速且安全的轨道切换。
5.技术方案:本发明所述的基于两侧导向机构的prt车辆快速变轨系统,包括带转向机构的prt车辆以及具有两侧导向机构的变轨轨道;所述变轨轨道的两侧导向机构分别为转弯导向轨和直行导向轨;所述prt车辆的转向机构基于车辆前行需求切换成转弯转向状态或直行转向状态,prt车辆在不同转向状态下沿着对应导向机构前行。
6.其中,所述转向机构设置在prt车辆的底盘上,底盘包括前端车架和后端车架;所述转向机构包括前转向装置、后转向装置和联动装置;前转向装置和后转向装置通过联动装置传动连接;前转向装置安装在前端车架上,后转向装置安装在后端车架上;prt车辆还包括车轮和导向轮,车轮通过固定在对应车架上的电机驱动转动,导向轮通过连接架固定在对应车架上。
7.其中,所述前转向装置包括驱动电机、减速器、传动轴i以及分别位于传动轴i两端的左摆动臂i和右摆动臂i;所述驱动电机的固定端固定在前端车架上,驱动电机的驱动端通过减速器与传动轴i传动连接;传动轴i通过轴承与支撑座i固定连接,传动轴i通过支撑座i固定在前端车架上。
8.其中,摆动臂包括直行转向臂、固定在直行转向臂一端的直行转向轮、固定在直行转向臂另一端的转弯转向臂以及固定在转弯转向臂远离直行转向臂端的转弯转向轮;直行转向臂与转弯转向臂呈90
°
设置;摆动臂还包括纵连杆摆臂,纵连杆摆臂一端固定在直行转向臂与转弯转向臂的连接处。直行转向臂为一根长臂,转弯转向臂为两根平行设置的短臂。
9.其中,所述联动装置对称布置在底盘左右两侧,所述联动装置包括纵向连杆、平行连杆和平行连杆支撑座;纵向连杆两端分别与小车前后端同侧摆动臂上的纵连杆摆臂转动连接,平行连杆支撑座固定在车架上,平行连杆一端与平行连杆支撑座转动连接,平行连杆另一端与纵向连杆上的平行销轴转动连接。
10.其中,所述后转向装置也包括传动轴ii以及分别位于传动轴ii两端的左摆动臂ii和右摆动臂ii;传动轴ii通过轴承与支撑座ii固定连接,传动轴ii通过支撑座ii固定在后端车架上;后转向装置的摆动臂通过联动装置与前转向装置的摆动臂传动连接。
11.其中,所述底盘还设有设置在前端车架其中一侧摆动臂侧边的传感器,传感器用于检测转向机构的转向状态,传感器为电容式或电感式接近开关。
12.其中,所述变轨轨道包括连接车道i和车道ii的道岔段轨道;所述道岔段轨道依次包括道岔轨道入口段、道岔轨道匝道段和道岔轨道出口段;道岔轨道入口段通过道岔轨道匝道段与道岔轨道出口段连接;道岔轨道入口段和道岔轨道出口段分别与对应车道的非道岔段轨道连接;所述道岔轨道入口段和道岔轨道出口段均为其中一侧设置转弯导向轨,另一侧设置直行导向轨;所述道岔轨道匝道段两侧均设置转弯导向轨。
13.其中,所述非道岔段轨道包括铺设在支撑架上的走行轨、位于支撑架两侧立架内侧的导向轨以及位于立架上部的辅助导向轨;所述道岔段轨道也包括铺设在支撑架上的走行轨和位于支撑架两侧立架内侧的导向轨。
14.其中,所述转弯导向轨横截面为t型或i型,可以配合转弯转向轮进行导向;所述直行导向轨呈顶部开口的u型或c型。
15.有益效果:(1)针对现有技术中当前进路上出现道岔,直行的车辆每经过一个道岔就需要进行转向动作的问题,本发明系统对于直行转向状态的小车,在道岔处无需车辆进行转向动作,只需要车身两侧转向臂都处于直行状态,沿着单侧的直行导向轨前行就可以一直直行;(2)针对现有技术中在道岔处切换轨道时车辆需要先左转向再右转向才能进入相邻轨道上的问题,本发明系统对于转弯转向状态的小车,在道岔处进行一次转向动作,将车身两侧转向臂都处于转弯状态,沿着单侧的转弯导向轨前行就可以连续通过两个道岔进入相邻轨道,从而有效降低变轨过程的复杂程度,提高变轨的安全性。
附图说明
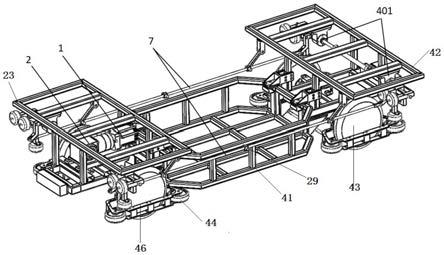
16.图1为底盘的结构示意图i;
17.图2为底盘的结构示意图ii;
18.图3为前端车架设置有传感器的局部结构图;
19.图4为固定在前端车架上前转向装置的结构示意图;
20.图5为底盘的俯视图;
21.图6为底盘的侧视图;
22.图7为摆动臂的结构示意图;
23.图8为摆动臂转弯状态的结构示意图;
24.图9为摆动臂直行状态的结构示意图;
25.图10为非道岔段轨道的结构示意图;
26.图11为道岔轨道入口段和道岔轨道出口段的结构示意图;
27.图12为道岔轨道匝道段的结构示意图;
28.图13为prt车辆通过非道岔段轨道车轨配合示意图;
29.图14为prt车辆直行通过道岔轨道入口段车轨配合示意图;
30.图15为prt车辆转弯通过道岔轨道入口段车轨配合示意图;
31.图16为prt车辆转弯通过道岔轨道匝道段车轨配合示意图;
32.图17为道岔轨道入口段示意图;
33.图18为道岔轨道出口段示意图。
具体实施方式
34.以下结合附图对本发明技术方案作进一步说明。
35.如图1~18所示,本发明基于两侧导向机构的prt车辆快速变轨系统,包括带转向机构的prt车辆以及具有两侧导向机构的变轨轨道;变轨轨道的两侧导向机构分别为转弯导向轨17和直行导向轨18;prt车辆的转向机构基于车辆前行需求切换成转弯转向状态或直行转向状态,prt车辆在不同转向状态下沿着对应导向机构前行。
36.转向机构设置在prt车辆的底盘41上,底盘41包括前端车架23和后端车架42;转向机构包括前转向装置、后转向装置和联动装置;前转向装置和后转向装置通过联动装置传动连接;前转向装置安装在前端车架23上,后转向装置安装在后端车架42上;prt车辆40还包括车轮43和导向轮44,车轮43通过固定在车架上的电机驱动转动,导向轮44通过连接架46固定在对应车架上。
37.其中,前转向装置包括驱动电机1、减速器2、传动轴i3以及分别位于传动轴i3两端的左摆动臂i5和右摆动臂i6;驱动电机1的固定端固定在前端车架23上,驱动电机1的驱动端通过减速器2与传动轴i3传动连接;传动轴i3通过轴承与支撑座i4固定连接,传动轴i3通过支撑座i4固定在前端车架23上;后转向装置也包括传动轴ii301以及分别位于传动轴ii301两端的左摆动臂ii501和右摆动臂ii601;传动轴ii301通过轴承与支撑座ii固定连接,传动轴ii301通过支撑座ii固定在后端车架31上。左摆动臂i5、右摆动臂i6、左摆动臂ii501和右摆动臂ii601结构一样,摆动臂包括直行转向臂10、固定在直行转向臂10一端的直行转向轮13、固定在直行转向臂10另一端的转弯转向臂11以及固定在转弯转向臂11远离直行转向臂10端的转弯转向轮30;直行转向臂10与转弯转向臂11呈90
°
设置;摆动臂还包括纵连杆摆臂12,纵连杆摆臂12一端固定在直行转向臂10与转弯转向臂11的连接处。直行转向臂10为一根长臂,转弯转向臂11为两根平行设置的短臂,转弯转向轮30成对设置,夹着横截面呈t型或i型的转弯导向轨17导向前进;直行转向轮13在顶部开口的直行导向轨18中导向前进。
38.联动装置对称布置在底盘41左右两侧,联动装置包括纵向连杆7、平行连杆8和平行连杆支撑座9;左侧纵向连杆7两端分别与左摆动臂i5和左摆动臂ii501上的纵连杆摆臂12转动连接,同理右侧纵向连杆7两端分别与右摆动臂i6和右摆动臂ii601上的纵连杆摆臂
12转动连接;平行连杆支撑座9固定在车架上,平行连杆8一端与平行连杆支撑座9转动连接,平行连杆8另一端与纵向连杆7上的平行销轴转动连接,后转向装置的摆动臂通过联动装置与前转向装置的摆动臂传动连接。底盘41还设有设置在前端车架23右摆动臂i6侧边的传感器29,传感器29用于检测转向机构的转向状态,传感器29为电容式或电感式接近开关。传感器29头部对着转向摆动臂的位置,当转向摆动臂处于正确的位置上,会靠近接近开关,接近开关会被触发,因为有直行位置和转弯位置两种状态,所以有两个接近开关。prt车辆还包括位于车体内的控制系统,传感器29、驱动电机1、电机以及轨道旁的到位传感器均与控制系统进行信息交互。
39.驱动电机1、减速器2转动,提供扭矩驱动左摆动臂i5和右摆动臂i6同步进行旋转运动,同时左摆动臂i5和右摆动臂i6也将扭矩通过纵向连杆7传递给左摆动臂ii501和右摆动臂ii601进行同步旋转运动,最终将小车底盘41四个转向摆动臂进行联动,其中,联动装置设置平行连杆8是为了确保前转向装置与后转向装置的转向摆动臂联动时转动角度保持一致,减小转动角度偏差。
40.当转向摆动臂上的直行转向臂10为水平位置,转弯转向臂11为垂直位置,此时转向状态检测传感器29触发信号,判断小车为转弯转向状态,此时小车可以通过道岔转弯或连续两次通过道岔进行变轨。驱动电机1、减速器2转动,提供扭矩驱动左摆动臂i5和右摆动臂i6顺时针同步旋转90
°
,同时左摆动臂i5和右摆动臂i6也将扭矩通过纵向连杆7传递给左摆动臂ii501和右摆动臂ii601顺时针同步旋转90
°
,此时转向摆动臂上的转弯转向臂11为水平位置,直行转向臂10为垂直位置,此时转向状态检测传感器29触发信号,判断小车为直行转向状态,此时小车可以直行通过道岔。
41.两条并行设置的车道i25和车道ii24,变轨轨道包括连接车道i25和车道ii24的道岔段轨道;车道i25和车道ii24均包括非道岔段轨道19;道岔段轨道依次包括道岔轨道入口段20、道岔轨道匝道段22和道岔轨道出口段21;道岔轨道入口段20通过道岔轨道匝道段22与道岔轨道出口段21连接;道岔轨道入口段20和道岔轨道出口段21分别与对应车道的非道岔段轨道19连接;车道i25、车道ii24为相邻两车道,假设prt车辆行驶方向为自左向右,行驶在车道i25上的prt车辆可以通过道岔轨道入口段20沿车道i25继续行驶,也可以通过道岔轨道入口段20变轨,经过道岔轨道匝道段22、道岔轨道出口段21驶入轨道ⅱ24。
42.非道岔段轨道19包括铺设在支撑架27上的走行轨14、位于支撑架27两侧立架28内侧的导向轨16以及位于立架28上部的辅助导向轨15。走行轨14为prt车辆车轮43行走提供支撑,导向轨16对prt车辆的导向轮44提供支撑和约束,辅助导向轨15对prt车辆的直行转向轮提供约束。
43.道岔段轨道也包括铺设在支撑架27上的走行轨14和位于支撑架27两侧立架28内侧的导向轨16;道岔轨道入口段20和道岔轨道出口段21的立架上部为转弯导向轨17和直行导向轨18;转弯导向轨17横截面呈t型或i型,可以配合转弯转向轮30进行导向;直行导向轨18呈顶部开口的u型或c型,可以配合直行转向轮13进行导向;道岔轨道匝道段22相对设置的立架上部均为转弯导向轨17,转向系统为转弯状态的prt车辆由转弯导向轨17进行导向快速通过道岔轨道匝道段22,道岔轨道匝道段22轨道两侧都布置转弯导向轨17便于自左向右和自右向左行驶的车辆都能通过道岔轨道匝道段22进行导向转向(道岔轨道匝道段22轨道两侧的转弯导向轨17呈曲线延伸)。转向系统为转弯状态的prt车辆由转弯导向轨17进行
导向驶入道岔段轨道进行转弯,转向系统为直行状态的prt车辆由直行导向轨18进行导向直行通过道岔继续向前行驶。
44.在当车辆处于车道的非道岔段轨道19时,小车底盘41上的左摆动臂i5、右摆动臂i6、左摆动臂ii501和右摆动臂ii601通过联动装置使四个转向摆动臂的转弯转向臂11为水平位置,直行转向臂10为垂直位置,小车此时为直行状态。如图11所示,此时车辆与轨道依靠两侧的导向轮44与导向轨16配合进行导向,左前、左后、右前、右后四个转向摆动臂的直行转向轮13与辅助导向轨15配合进行辅助导向及稳定车身。
45.当车辆即将直行通过道岔轨道入口段20时,保持四个转向摆动臂的转弯转向臂11为水平位置,直行转向臂11为垂直位置,小车此时仍为直行状态,小车通过道岔轨道入口段20的整个时间段必须一直保持直行状态,此时车辆左侧导向轮44与左侧直行转向轮13失去约束,依靠右侧右摆动臂i6和右摆动臂ii601的直行转向轮13与直行导向轨18配合进行导向。此时,左侧左摆动臂i5和左摆动臂ii501的直行转向臂10从左侧转弯导向轨17的内侧经过,不发生干涉。小车通过道岔轨道入口段20后,小车保持直行状态,车辆进入非道岔段轨道19,车辆与轨道依靠两侧导向轮44与导向轨16配合进行导向,左前、左后、右前、右后四个转向摆动臂的直行转向轮13与辅助导向轨15配合进行辅助导向及稳定车身。
46.当车辆需要转弯通过道岔轨道入口段20时,小车在未到达道岔轨道入口段20前,驱动电机1、减速器2转动,驱动左摆动臂i5、右摆动臂i6、左摆动臂ii501和右摆动臂ii601逆时针同步旋转90
°
,此时转向摆动臂上的转弯转向臂11为垂直位置,直行转向臂10为水平位置,此时小车为转弯转向状态,此时小车可以继续前进,转弯通过道岔轨道入口段20,小车通过道岔轨道入口段20的整个时间段转向摆动臂必须一直保持转弯状态。此时车辆右侧导向轮44与右侧转弯转向臂11的轮子30失去约束,依靠左侧左摆动臂i5及左摆动臂ii501的转弯转向臂11的轮子30与转弯导向轨17配合进行导向,引导车辆转弯进入道岔轨道入口段20。此时,右侧右摆动臂i6及右摆动臂ii601的转弯转向臂11从右侧直行导向轨18的上方经过,不发生干涉。
47.当车辆转弯通过道岔轨道入口段20后进入道岔轨道匝道段22时,车通过道岔轨道匝道段22的整个时间段继续保持转弯状态。车辆恢复两侧导向轮44与导向轨16配合导向,左侧左摆动臂i5及左摆动臂ii501的转弯转向臂11的轮子30与左侧转弯导向轨17继续配合进行导向,同时右侧右摆动臂i5及右摆动臂ii501的转弯转向轮30与右侧转弯导向轨17开始同步配合进行导向。
48.当车辆通过道岔轨道匝道段22后进入道岔轨道出口段21时,车通过道岔轨道出口段21的整个时间段继续保持转弯状态。此时车辆左侧导向轮44与左侧转弯转向轮30失去约束,依靠右侧右摆动臂i6及右摆动臂ii601的转弯转向轮30与右侧转弯导向轨17配合进行导向,引导车辆转弯通过道岔轨道出口段21驶入车道ⅱ24。此时,左侧左摆动臂i5及左摆动臂ii501的转弯转向臂11从道岔轨道出口段21左侧直行导向轨18的上方经过,不发生干涉。
49.当车辆完全通过道岔轨道出口段21驶入车道ⅱ24后,继续向前行驶,进入非道岔段轨道19,此时驱动电机1、减速器2转动,驱动左摆动臂i5、右摆动臂i6、左摆动臂ii501和右摆动臂ii601顺时针同步旋转90
°
,此时转向摆动臂上的转弯转向臂11为水平位置,直行转向臂10为垂直位置,此时小车为直行转向状态,此时小车保持直行转向状态沿车道ⅱ24非道岔段轨道19继续前进。
50.本发明快速变轨系统根据prt车辆上转向机构的动作状态将prt车辆的转向状态分为直行转向状态和转弯转向状态。在进入道岔前,由prt车辆通过自己的规划路径确认行进方向是直行还是转弯,如是直行,车辆保持转向机构为直行状态配合直行导向轨直行通过道岔;如是转弯,车辆的转向机构由直行转向状态切换为转弯转向状态配合转弯导向轨转弯通过道岔;如是切换轨道,车辆保持转向机构为转弯状态配合转弯导向轨连续两次通过道岔行驶进入相邻的轨道。小车在直行转向状态下经过道岔时无需动作切换,直接从非道岔段轨道直行进入道岔轨道,直至通过道岔轨道再次进入非道岔段轨道。小车在转弯转向状态下能够连续通过两个道岔,快速完成轨道切换,中间不需要进行方向变换,降低变轨过程的复杂程度,减小系统控制难度,提高了变轨的安全性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1