转向装置的制作方法
[0001]
本发明涉及转向装置。
背景技术:
[0002]
已知一种所谓的线控转向型转向装置,其中,方向盘与转弯轮之间的动力传递被切断。这样的转向装置包括:反作用电机,其是施加至转向轴的转向反作用力的源;以及转弯电机,其是用于使转弯轮转弯的转弯力的源。当车辆行驶时,转向装置的控制装置使用反作用电机生成转向反作用力,并且使用转弯电机使转弯轮转弯。
[0003]
在线控转向型转向装置中,由于方向盘与转弯轮之间的动力传递被切断,因此作用在转弯轮上的路面反作用力不太可能被传递至方向盘。因此,驾驶员不会经由方向盘很好地感觉到路面状态来作为响应。
[0004]
因此,例如,在日本未审查专利申请公布第2017-165219号(jp2017-165219 a)中描述的控制装置基于目标转弯角来计算作为理想齿条轴向力的理想轴向力,并且基于转弯电机的电流值来计算作为齿条轴向力的估计值的路面轴向力。控制装置将理想轴向力和路面轴向力以预定的分配比率相加,并且使用基于相加的轴向力的基本反作用力来控制反作用电机。由于路面轴向力反映了路面状态,因此由反作用电机生成的转向反作用力也反映了路面状态。因此,驾驶员可以将路面状态感知为转向反作用力。
[0005]
控制装置计算用于虚拟地限制方向盘的操作范围的限制反作用力。控制装置选择目标转向角度和目标转弯角度中的较大者,并且在所选择的目标转向角度或所选择的目标转弯角度达到阈值的情况下,生成限制反作用力并迅速增大限制反作用力。基于以下观点来设置阈值:在使转弯轮转弯的齿条轴达到其物理可移动范围的限制位置紧之前以及在方向盘达到由螺旋线缆确定的操作范围的限制位置紧之前都迅速增大转向反作用力。
[0006]
控制装置通过将基本反作用力和限制反作用力相加来计算最终反作用力,并使用该最终反作用力来控制反作用电机。由于在目标转向角度或目标转弯角度达到阈值之后迅速增大转向反作用力,因此驾驶员难以在转向角度的绝对值增大的方向上操作方向盘。因此,可以虚拟地形成方向盘的操作范围和齿条轴的可移动范围。
技术实现要素:
[0007]
在jp 2017-165219 a中描述的控制装置中,存在以下问题。即,在计算了限制反作用力时,控制装置通过将限制反作用力和基本反作用力(base reaction force)相加来计算用于控制反作用电机的最终反作用力。因此,由于将限制反作用力和基本反作用力相加,因此会向驾驶员提供比必要的转向反作用力更大的转向反作用力。例如,当在路面轴向力在基本反作用力中的分配比例较大的状态下,即在路面轴向力占主要的状态下,例如在车辆以低速大转弯的状态下,将限制反作用力相加时,可能会发生这种现象。
[0008]
本发明使得能够给驾驶员带来更适当的转向感觉。
[0009]
本发明的一个方面提供了一种转向装置。该转向装置包括:转弯轴,其被配置成使
转弯轮转弯;转向机构,其包括转弯轴;电机,其被配置成生成施加至转向机构的驱动力;以及控制装置,其被配置成基于根据转向状态计算的命令值来控制电机。该控制装置包括转向范围轴向力计算电路、限制轴向力计算电路、最终轴向力计算电路以及轴向力调节电路。转向范围轴向力计算电路被配置成计算当方向盘在预定操作范围内操作时的转向范围轴向力,该转向范围轴向力包括至少反映经由转弯轮作用在转弯轴上的力的轴向力。限制轴向力计算电路被配置成计算限制轴向力,该限制轴向力是用于虚拟地限制方向盘的操作的轴向力。最终轴向力计算电路被配置成基于转向范围轴向力和限制轴向力来计算最终轴向力,该最终轴向力是反映在命令值中的最终轴向力。轴向力调节电路被配置成:在最终轴向力反映限制轴向力的情况下,基于反映作用在转弯轴上的力的轴向力来调节转向范围轴向力、限制轴向力或最终轴向力的值。
[0010]
利用该配置,在最终轴向力反映限制轴向力的情况下,通过根据反映作用在转弯轴上的力的轴向力调节转向范围轴向力、限制轴向力或最终轴向力的值来获取更适当的最终轴向力。通过在命令值中反映适当的最终轴向力,将更适当的驱动力施加至车辆的转向机构。因此,可以给驾驶员带来更适当的转向感。
[0011]
在转向装置中,轴向力调节电路可以被配置成:在最终轴向力反映限制轴向力的情况下,根据反映作用在转弯轴上的力的轴向力占据转向范围轴向力的比率来减小转向范围轴向力或限制轴向力在最终轴向力中的反映程度。
[0012]
利用该配置,在最终轴向力反映限制轴向力的情况下,根据反映作用在转弯轴上的力的轴向力占据转向范围轴向力的比率来减小转向范围轴向力或限制轴向力在最终轴向力中的反映程度。因此,与没有改变地使用转向范围轴向力和限制轴向力两者来计算最终轴向力的情况不同,可以抑制计算出具有过大的值的最终轴向力。通过在命令值中反映适当的最终轴向力,可以给驾驶员带来更适当的转向感。
[0013]
在转向装置中,可以通过将反映作用在转弯轴上的力的第一轴向力和不反映作用在转弯轴上的力的第二轴向力以根据车辆状态设置的比率进行混合来获取转向范围轴向力。轴向力调节电路可以被配置成:在最终轴向力反映限制轴向力的情况下,根据第一轴向力占据转向范围轴向力的比率来减小限制轴向力的值。
[0014]
利用该配置,由于在最终轴向力反映最终轴向力中的限制轴向力的情况下,限制轴向力的值根据第一轴向力占据转向范围轴向力的比率而减小,因此可以抑制计算出具有过大的值的最终轴向力。
[0015]
在转向装置中,可以通过将反映作用在转弯轴上的力的第一轴向力和不反映作用在转弯轴上的力的第二轴向力以根据车辆状态设置的比率进行混合来获取转向范围轴向力。轴向力调节电路可以被配置成:在最终轴向力反映限制轴向力的情况下,根据第一轴向力占据转向范围轴向力的比率来减小第二轴向力或转向范围轴向力的值。
[0016]
利用该配置,由于在最终轴向力反映限制轴向力的情况下,第二轴向力或转向范围轴向力的值根据第一轴向力占据转向范围轴向力的比率来减小,因此可以抑制计算出具有过大的值的最终轴向力。
[0017]
在转向装置中,最终轴向力计算电路可以被配置成通过将转向范围轴向力和限制轴向力相加来计算最终轴向力。根据该配置,由于将转向范围轴向力和限制轴向力相加,所以可能会计算出具有过大的值的最终轴向力。因此,可以优选地采用包括轴向力调节单元
的配置作为转向控制装置。
[0018]
在转向装置中,限制轴向力计算电路可以被配置成计算第一限制轴向力、第二限制轴向力和第三限制轴向力中的至少之一。第一限制轴向力是用于虚拟地限制方向盘的操作范围的轴向力。第二限制轴向力可以是用于在转弯轮的转弯操作受到限制的情况下虚拟地限制方向盘的操作的轴向力。第三限制轴向力是用于在电机的转矩被限制为小于本该生成的转矩的值的情况下虚拟地限制方向盘的操作的轴向力。
[0019]
利用这种配置,在第一限制轴向力、第二限制轴向力和最终轴向力中的至少之一反映第三限制轴向力的情况下,可能会计算出具有过大的值的最终轴向力。因此,可以优选地采用包括轴向力调节单元作为转向控制装置的配置。
[0020]
在转向装置中,转向机构可以具有在方向盘与转弯轮之间的动力传递被切断的结构或者具有在方向盘与转弯轮之间的动力传递为间断性的结构。电机可以是生成转向反作用力来作为驱动力的反作用电机,该转向反作用力是在与方向盘的操作方向相反的方向上的转矩。
[0021]
利用该配置,由于命令值反映了更适当的最终轴向力,因此可以给驾驶员带来更适当的转向反作用力。在转向装置中,转向机构可以具有方向盘和转弯轮以可传递动力的方式连接的结构。电机可以是生成转向辅助力来作为驱动力的辅助电机,该转向辅助力是在与方向盘的操作方向平行的方向上的转矩。
[0022]
利用该配置,由于命令值反映了更适当的最终轴向力,因此可以给驾驶员带来更适当的转向辅助力。
[0023]
利用根据本发明的转向装置,可以给驾驶员带来更适当的转向感觉。
附图说明
[0024]
下面将参照附图描述本发明的示例性实施方式的特征、优点以及技术和工业意义,在附图中相同的附图标记表示相同的元件,并且在附图中:
[0025]
图1是示出安装有根据第一实施方式的转向控制装置的线控转向型转向装置的配置的图;
[0026]
图2是示出根据第一实施方式的控制装置的控制框图;
[0027]
图3是示出根据第一实施方式的转向反作用力命令值计算单元的控制框图;
[0028]
图4是示出根据第一实施方式的限制轴向力计算单元的控制框图;
[0029]
图5是示出根据第二实施方式的限制轴向力计算单元的控制框图;
[0030]
图6是示出根据第三实施方式的限制轴向力计算单元的控制框图;
[0031]
图7是示出根据第四实施方式的混合轴向力计算单元的控制框图;
[0032]
图8a是示出根据第五实施方式的轴向力计算单元的控制框图;
[0033]
图8b是示出根据第五实施方式的增益计算单元的控制框图;以及
[0034]
图9是应用于电动助力转向装置的根据第六实施方式的转向控制装置的控制框图。
具体实施方式
[0035]
第一实施方式
[0036]
在下文中,将描述转向控制装置应用于线控转向型转向装置的第一实施方式。
[0037]
如图1所示,车辆的转向装置10包括连接至方向盘11的转向轴12。转向装置10包括沿车辆宽度方向(图1中的左右方向)延伸的转弯轴14。左右转弯轮16经由拉杆15和15连接至转弯轴14的两端。通过使转弯轴14线性移动,转弯轮16的转弯角度θ
w
改变。转向轴12和转弯轴14构成车辆的转向机构。
[0038]
转向装置10包括反作用电机31、减速齿轮机构32、旋转角度传感器33和转矩传感器34,作为用于生成转向反作用力的元件。此外,转向反作用力是在与驾驶员操作方向盘11的方向相反的方向上作用的力。通过向方向盘11施加转向反作用力,可以给驾驶员带来适当的响应感。
[0039]
反作用电机31是转向反作用力的源。例如,采用三相无刷电机作为反作用电机31。反作用电机31(确切地说,其旋转轴)经由减速齿轮机构32连接至转向轴12。反作用电机31的转矩作为转向反作用力施加至转向轴12。
[0040]
旋转角度传感器33设置在反作用电机31中。旋转角度传感器33检测反作用电机31的旋转角度θ
a
。反作用电机31的旋转角度θ
a
用于计算转向角度θ
s
。反作用电机31和转向轴12经由减速齿轮机构32协同操作。因此,反作用电机31的旋转角度θ
a
和转向轴12的旋转角度与作为方向盘11的旋转角度的转向角度θ
s
具有相关性。因此,可以基于反作用电机31的旋转角度θ
a
来计算转向角度θ
s
。
[0041]
转矩传感器34检测通过方向盘11的旋转操作施加至转向轴12的转向转矩th。转矩传感器34设置在转向轴12的比减速齿轮机构32更靠近方向盘11的部分处。
[0042]
转向装置10包括转弯电机41、减速齿轮机构42和旋转角度传感器43作为用于生成转弯力的元件,该转弯力是用于使转弯轮16转弯的动力。
[0043]
转弯电机41是转弯力的源。例如,采用三相无刷电机作为转弯电机41。转弯电机41的旋转轴经由减速齿轮机构42连接至小齿轮轴44。小齿轮轴44的小齿轮齿44a与转弯轴14的齿条齿14b啮合。经由小齿轮轴44将转弯电机41的转矩作为转弯力施加至转弯轴14。随着转弯电机41的旋转,转弯轴14沿车辆宽度方向(图1中的左右方向)移动。
[0044]
旋转角度传感器43设置在转弯电机41中。旋转角度传感器43检测转弯电机41的旋转角度θ
b
。此外,转向装置10包括小齿轮轴13。小齿轮轴13设置成与转弯轴14相交。小齿轮轴13的小齿轮齿13a与转弯轴14的齿条齿14a啮合。小齿轮轴13被设置成使得转弯轴14以及小齿轮轴44一起被支承在未示出的壳体中。即,转弯轴14被设置在转向装置10中的支承机构(未示出)支承为能够沿其轴向移动,并被压向小齿轮轴13和44。因此,转弯轴14被支承在壳体中。可以设置另一种在不使用小齿轮轴13的情况下将转弯轴14支承在壳体中的支承机构。
[0045]
转向装置10包括控制装置50。控制装置50基于来自安装在车辆中的各种传感器的检测结果来控制反作用电机31和转弯电机41。除了旋转角度传感器33、转矩传感器34和旋转角度传感器43以外,传感器还包括车辆速度传感器501。车辆速度传感器501检测作为车辆的行驶速度的车辆速度v。
[0046]
控制装置50通过控制反作用电机31的驱动,执行用于基于转向转矩t
h
生成转向反作用力的反作用力控制。控制装置50基于转向转矩t
h
和车辆速度v来计算目标转向反作用力,并基于计算的目标转向反作用力来计算转向反作用力命令值。控制装置50将基于转向
反作用力命令值生成转向反作用力所需的电流供应至反作用电机31。
[0047]
控制装置50通过控制转弯电机41的驱动,执行用于使转弯轮16根据转向状态转弯的转弯控制。控制装置50基于由旋转角度传感器43检测到的转弯电机41的旋转角度θ
b
来计算作为小齿轮轴44的实际旋转角度的小齿轮角度θ
p
。小齿轮角度θ
p
是反映转弯轮16的转弯角度θ
w
的值。控制装置50基于由旋转角度传感器33检测出的反作用电机31的旋转角度θ
a
来计算转向角度θ
s
,并基于计算出的转向角度θ
s
来计算作为小齿轮角度θ
p
的目标值的目标小齿轮角度。然后,控制装置50计算目标小齿轮角度与实际小齿轮角度θ
p
之间的差,并且控制至转弯电机41的电力供应,使得消除该差。
[0048]
下面将详细描述控制装置50。如图2所示,控制装置50包括执行反作用力控制的反作用力控制单元50a和执行转弯控制的转弯控制单元50b。
[0049]
反作用力控制单元50a包括转向角度计算单元51、转向反作用力命令值计算单元52和电力供应控制单元53。转向角度计算单元51基于通过旋转角度传感器33检测到的反作用电机31的旋转角度θ
a
来计算方向盘11的转向角度θ
s
。
[0050]
转向反作用力命令值计算单元52基于转向转矩t
h
和车辆速度v来计算转向反作用力命令值t*。转向反作用力命令值计算单元52计算转向反作用力命令值t*,使得其绝对值随着转向转矩t
h
的绝对值变大以及随着车辆速度v变低而变大。将在后面描述转向反作用力命令值计算单元52的细节。
[0051]
电力供应控制单元53基于转向反作用力命令值t*将电力供应至反作用电机31。具体地,电力供应控制单元53基于转向反作用力命令值t*来计算用于反作用电机31的电流命令值。电力供应控制单元53使用设置在至反作用电机31的供电路径中的电流传感器54来检测在该供电路径中流动的电流i
a
的实际值。电流i
a
的值是供应至反作用电机31的电流的实际值。电力供应控制单元53计算电流命令值与电流i
a
的实际值之间的差,并且控制至反作用电机31的电力供应,使得消除该差。因此,反作用电机31基于转向反作用力命令值t*生成转矩。可以给驾驶员带来基于路面反作用力的适当的响应感。
[0052]
转弯控制单元50b包括小齿轮角度计算单元61、目标小齿轮角度计算单元62、小齿轮角度反馈控制单元63和电力供应控制单元64。小齿轮角度计算单元61基于由旋转角度传感器43检测的转弯电机41的旋转角度θ
b
来计算作为小齿轮轴44的实际旋转角度的小齿轮角度θ
p
。转弯电机41和小齿轮轴44经由减速齿轮机构42协同操作。因此,在转弯电机41的旋转角度θ
b
与小齿轮角度θ
p
之间存在相关性。可以使用该相关性根据转弯电机41的旋转角度θ
b
来计算小齿轮角度θ
p
。小齿轮轴44与转弯轴14啮合。因此,在小齿轮角度θ
p
与转弯轴14的移动量之间也存在相关性。即,小齿轮角度θ
p
是反映转弯轮16的转弯角度θ
w
的值。
[0053]
目标小齿轮角度计算单元62基于由转向角度计算单元51计算的转向角度θ
s
来计算目标小齿轮角度θ
p
*。在该实施方式中,目标小齿轮角度计算单元62将目标小齿轮角度θ
p
*设置为与转向角度θ
s
相同的值。即,作为转弯角度θ
w
与转向角度θ
s
之比的转向角度比率为“1:1”。
[0054]
此外,目标小齿轮角度计算单元62可以将目标小齿轮角度θ
p
*设置为与转向角度θ
s
不同的值。即,目标小齿轮角度计算单元62根据车辆的行驶状态诸如车辆速度v设置作为转弯角度θ
w
与转向角度θ
s
之比的转向角度比率,并根据设置的转向角度比率计算目标小齿轮角度θ
p
*。目标小齿轮角度计算单元62计算目标小齿轮角度θ
p
*,使得转弯角度θ
w
随着车辆速
度v变低而变得大于转向角度θ
s
,并且转弯角度θ
w
随着车辆速度v变高而变得小于转向角度θ
s
。为了实现根据车辆的行驶状态设置的转向角度比率,目标小齿轮角度计算单元62通过计算针对转向角度θ
s
的校正角度并且将计算出的校正角度与转向角度θ
s
相加,基于转向角度比率来计算目标小齿轮角度θ
p
*。
[0055]
小齿轮角度反馈控制单元63接收由目标小齿轮角度计算单元62计算的目标小齿轮角度θ
p
*和由小齿轮角度计算单元61计算的实际小齿轮角度θ
p
。小齿轮角度反馈控制单元63通过小齿轮角度θ
p
的反馈控制来计算小齿轮角度命令值t
p
*,使得实际小齿轮角度θ
p
跟随目标小齿轮角度θ
p
*。
[0056]
电力供应控制单元64基于小齿轮角度命令值t
p
*将电力供应至转弯电机41。具体地,电力供应控制单元64基于小齿轮角度命令值t
p
*来计算针对转弯电机41的电流命令值。电力供应控制单元64使用设置在至转弯电机41的供电路径中的电流传感器65来检测在该供电路径中生成的电流i
b
的实际值。电流i
b
的值是供应至转弯电机41的电流的实际值。然后,电力供应控制单元64计算电流命令值与电流i
b
的实际值之间的差,并且控制至转弯电机41的电力供应,使得消除该差。因此,转弯电机41旋转与小齿轮角度命令值t
p
*相对应的角度。
[0057]
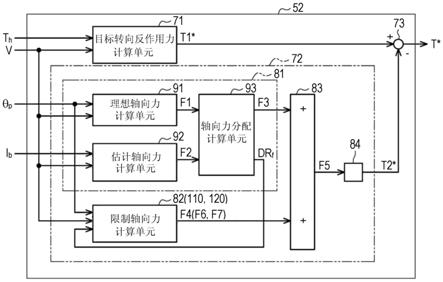
下面将详细描述转向反作用力命令值计算单元52。如图3所示,转向反作用力命令值计算单元52包括目标转向反作用力计算单元71、轴向力计算单元72和减法器73。
[0058]
目标转向反作用力计算单元71基于转向转矩t
h
和车辆速度v来计算目标转向反作用力t1*。目标转向反作用力t1*是由反作用电机31生成并沿与方向盘11的操作方向相反的方向施加的转矩的目标值。目标转向反作用力计算单元71计算目标转向反作用力t1*,使得其绝对值随着转向转矩t
h
的绝对值变大以及随着车辆速度v变低而变大。
[0059]
轴向力计算单元72基于小齿轮角度θ
p
、转弯电机41的电流i
b
的值以及车辆速度v来计算经由转弯轮16作用在转弯轴14上的轴向力,并且计算通过将计算出的轴向力转换成转矩而获得的经转换的转矩值(基于轴向力的转向反作用力)t2*。
[0060]
减法器73通过从由目标转向反作用力计算单元71计算的目标转向反作用力t1*减去由轴向力计算单元72计算的经转换的转矩值t2*来计算转向反作用力命令值t*。
[0061]
下面将详细描述轴向力计算单元72。轴向力计算单元72包括混合轴向力计算单元81、限制轴向力计算单元82、加法器83和转换器84。混合轴向力计算单元81包括理想轴向力计算单元91、估计轴向力计算单元92和轴向力分配计算单元93。
[0062]
理想轴向力计算单元91基于小齿轮角度θ
p
计算理想轴向力f1,该理想轴向力f1是经由转弯轮16施加至转弯轴14的轴向力的理想值。理想轴向力计算单元91使用存储在控制装置50的存储单元中的理想轴向力映射来计算理想轴向力f1。理想轴向力映射是如下的映射:横轴表示小齿轮角度θ
p
,纵轴表示理想轴向力f1,并且根据车辆速度v来限定小齿轮角度θ
p
与理想轴向力f1之间的关系。理想轴向力映射具有以下特性。即,理想轴向力f1被设置成使得其绝对值随着小齿轮角度θ
p
的绝对值变大以及随着车辆速度v变低而变大。理想轴向力f1被设置成与小齿轮角度θ
p
的符号相同的符号。理想轴向力f1的绝对值随着小齿轮角度θ
p
的绝对值的增加而线性增加。理想轴向力f1是不反映路面状态或经由转弯轮16施加于转弯轴14的力的轴向力。
[0063]
估计轴向力计算单元92基于转弯电机41的电流i
b
的值来计算施加至转弯轴14的
估计轴向力f2。这里,转弯电机41的电流i
b
的值基于目标小齿轮角度θ
p
*与实际小齿轮角度θ
p
之间的差而变化,所述差是由于基于路面状态例如路面摩擦阻力而作用在转弯轮16上的干扰引起的。即,转弯电机41的电流i
b
的值反映了作用在转弯轮16上的实际路面状态。因此,可以基于转弯电机41的电流i
b
的值来计算反映路面状态的影响的轴向力。通过将转弯电机41的电流i
b
的值和作为基于车辆速度v的系数的增益相乘来计算估计轴向力f2。估计轴向力f2是反映路面状态或经由转弯轮16施加至转弯轴14的力的轴向力。
[0064]
轴向力分配计算单元93根据反映车辆行为、路面状态或转向状态的各种状态参数分别设置针对理想轴向力f1和估计轴向力f2的分配比例。轴向力分配计算单元93通过将理想轴向力f1和估计轴向力f2与分别设置的分配比例相乘而获得的值相加来计算混合轴向力f3。轴向力分配计算单元93将估计轴向力f2的分配比例dr
f
供应至限制轴向力计算单元82。
[0065]
可以仅基于作为一个车辆状态参数的车辆速度v来设置分配比例。在这种情况下,例如,随着车辆速度v变高,理想轴向力f1的分配比例被设置为较大,而估计轴向力f2的分配比例被设置为较小。随着车辆速度v变低,理想轴向力f1的分配比例被设置为较小,而估计轴向力f2的分配比例被设置为较大。
[0066]
限制轴向力计算单元82基于小齿轮角度θ
p
计算用于虚拟地限制方向盘11的操作范围的限制轴向力f4。基于以下观点来计算限制轴向力f4:当方向盘11的操作位置接近操作范围的限制位置时或者当转弯轴14接近其物理可移动范围的限制位置时,由反作用电机31生成的在与转向方向相反的方向上的转矩迅速增大。方向盘11的操作范围的限制位置例如由设置在方向盘11中的螺旋线缆的长度确定。转弯轴14的物理可移动范围的限制位置是由于发生所谓的“端接触”而物理地调节转弯轴14的可移动范围的位置,在“端接触”中,作为转弯轴14的端部的齿条端与未示出的壳体接触。限制轴向力f4被设置成与小齿轮角度θ
p
的符号相同的符号。
[0067]
加法器83通过将由混合轴向力计算单元81计算的混合轴向力f3与由限制轴向力计算单元82计算的限制轴向力f4相加来计算最终轴向力f5,该最终轴向力f5是用于计算转向反作用力命令值t*的最终轴向力。
[0068]
转换器84通过将由加法器83计算的最终轴向力f5转换为转矩来计算经转换的转矩值t2*。在此,当方向盘11的操作位置未接近操作范围的限制位置时或者当转弯轴14未接近其物理可移动范围的限制位置时,限制轴向力计算单元82不计算限制轴向力f4。因此,将由混合轴向力计算单元81计算的混合轴向力f3设置为最终轴向力f5。在这种情况下,由于通过将最终轴向力f5转换为转矩而获得的经转换的转矩值t2*反映在转向反作用力命令值t*中,因此,可以将与车辆行为或路面状态相对应的转向反作用力施加至方向盘11。驾驶员可以通过经由方向盘11感觉到转向反作用力作为响应来获悉车辆行为或路面状态。
[0069]
当方向盘11的操作位置接近操作范围的限制位置时或当转弯轴14接近其物理可移动范围的限制位置时,限制轴向力计算单元82计算限制轴向力f4。因此,将通过将由限制轴向力计算单元82计算的限制轴向力f4与由混合轴向力计算单元81计算的混合轴向力f3相加而获得的值设置为最终轴向力f5。在这种情况下,由于转向反作用力命令值t*反映了通过将最终轴向力f5转换为转矩而获得的经转换的转矩值t2*,因此转向反作用力迅速增大。因此,驾驶员难以在转向角度θ
s
的绝对值增大的方向上操作方向盘11。因此,驾驶员可
以通过感觉到触碰到端的感觉作为转向反作用力(响应)而识别出方向盘11已经达到虚拟操作范围的限制位置。
[0070]
当方向盘11的操作位置接近操作范围的限制位置时或当转弯轴14接近其物理可移动范围的限制位置时,担心的是,通过将混合轴向力f3和限制轴向力f4相加将计算出具有过大的值的最终轴向力f5,即具有过大的值的经转换的转矩值t2*。在这种情况下,可能向驾驶员施加比必要的转向反作用力更大的转向反作用力。例如,当在估计轴向力f2占据混合轴向力f3的分配比例较大的状态下即例如当车辆以低速大转弯时估计轴向力f2占主要的状态下将限制轴向力f4相加时,很可能发生这种现象。这是因为作为估计轴向力f2的增加与转向角度θ
s
的绝对值的增加的比率的斜率根据路面状态诸如路面摩擦阻力而改变,并且估计轴向力f2例如随着路面摩擦阻力变大以及随着转向角度θ
s
的值变大而变大。
[0071]
因此,在本实施方式中,限制轴向力计算单元82采用以下的配置。如图4所示,限制轴向力计算单元82包括虚拟齿条端角度计算单元101、减法器102、虚拟齿条端轴向力计算单元103、增益计算单元104和乘法器105。
[0072]
虚拟齿条端角度计算单元101根据车辆速度v计算虚拟齿条端角度θ
end
。虚拟齿条端角度计算单元101将虚拟齿条端角度θ
end
计算为随着车辆速度v变高具有较小的绝对值。虚拟齿条端角度θ
end
是与方向盘11的虚拟操作范围的限制位置相对应的转向角度或与转弯轴14的虚拟可移动范围的限制位置相对应的小齿轮角度。基于方向盘11达到其操作范围的限制位置时的转向角度θ
s
或者转弯轴14达到其可移动范围的限制位置时的小齿轮角度θ
p
的接近值来设置虚拟齿条端角度θ
end
。
[0073]
减法器102通过从由虚拟齿条端角度计算单元101计算的虚拟齿条端角度θ
end
减去由小齿轮角度计算单元61计算的小齿轮角度θ
p
来计算角度差δθ1。减法器102可以通过从虚拟齿条端角度θ
end
减去由转向角度计算单元51计算的转向角度θ
s
来计算角度差δθ1。
[0074]
虚拟齿条端轴向力计算单元103根据由减法器102计算的角度差δθ1来计算虚拟齿条端轴向力f4
pre
。虚拟齿条端轴向力计算单元103使用存储在控制装置50的存储单元中的限制轴向力映射m1来计算虚拟齿条端轴向力f4
pre
。限制轴向力映射m1是如下的映射:横轴表示角度差δθ1,纵轴表示虚拟齿条端轴向力f4
pre
,并且限定了角度差δθ1与虚拟齿条端轴向力f4
pre
之间的关系。限制轴向力映射m1具有以下特性。也就是说,当角度差δθ1的绝对值等于或小于相对于“0”设置的端确定阈值θ
th
时,生成虚拟齿条端轴向力f4
pre
,并且随着角度差δθ1的绝对值减小到“0”,虚拟齿条端轴向力f4
pre
在其绝对值增大的方向上迅速增大。当角度差δθ1的绝对值大于端确定阈值θ
th
时,虚拟齿条端轴向力f4
pre
的值保持为“0”。虚拟齿条端轴向力f4
pre
被设置为与小齿轮角度θ
p
的符号相同的符号。
[0075]
增益计算单元104根据由轴向力分配计算单元93计算的估计轴向力f2的分配比例dr
f
来计算增益g1。增益计算单元104使用存储在控制装置50的存储单元中的增益映射m2来计算增益g1。增益映射m2是如下的映射:横轴表示估计轴向力f2的分配比例dr
f
,纵轴表示增益g1,并且限定了分配比例dr
f
与增益g1之间的关系。增益映射m2具有以下特性。即,随着分配比例dr
f
的值从“0”增加,增益g1的值逐渐减小到“0”。
[0076]
乘法器105通过将由虚拟齿条端轴向力计算单元103计算的虚拟齿条端轴向力f4
pre
和由增益计算单元104计算的增益g1相乘来计算限制轴向力f4。
[0077]
在本实施方式中,混合轴向力计算单元81构成转向范围轴向力计算单元,该转向
范围轴向力计算单元根据包括转弯轮16的转弯状态等的车辆状态来计算转向范围轴向力。转向范围轴向力计算单元是权利要求中的“转向范围轴向力计算电路”的示例。转向范围轴向力是当方向盘11在被确定为其正常操作的转向范围的操作范围内操作时施加至转弯轴14的轴向力。加法器83对应于最终轴向力计算单元,该最终轴向力计算单元计算最终轴向力f5,该最终轴向力f5是反映在转向反作用力命令值t*中的最终轴向力。最终轴向力计算单元是权利要求中的“最终轴向力计算电路”的示例。增益计算单元104和乘法器105构成轴向力调节单元,该轴向力调节单元基于估计轴向力f2来调节限制轴向力f4的值,该估计轴向力f2是反映在最终轴向力f5反映限制轴向力f4的情况下施加至转弯轴14的力的轴向力。轴向力调节单元是权利要求中的“轴向力调节电路”的示例。估计轴向力f2是反映施加至转弯轴14的力的第一轴向力的示例,理想轴向力f1是不反映施加至转弯轴14的力的第二轴向力的示例。限制轴向力f4是用于虚拟地限制方向盘11的操作范围的限制轴向力的示例。限制轴向力计算单元是权利要求中的“限制轴向力计算电路”的示例。
[0078]
第一实施方式中的操作
[0079]
下面将描述第一实施方式中的操作。在小齿轮角度θ
p
接近虚拟齿条端角度θ
end
并且作为虚拟齿条端角度θ
end
与小齿轮角度θ
p
之间的差的角度差δθ1变得等于或小于端确定阈值θ
th
之后,限制轴向力f4随着角度差δθ1的减小而迅速增大。由于限制轴向力f4与混合轴向力f3相加,所以担心的是,将计算出具有过大的值的最终轴向力f5。这是因为理想轴向力f1仅仅是与小齿轮角度θ
p
相对应的值,并且估计轴向力f2随着路面摩擦阻力的增加而增加。特别地,当在估计轴向力f2占据混合轴向力f3的分配比例dr
f
变大的状态下即在估计轴向力f2占主要的状态下将限制轴向力f4相加时,最终轴向力f5可能具有过大的值。
[0080]
在这一点上,根据第一实施方式,限制轴向力f4的值根据分配比例dr
f
而变化,该分配比例dr
f
是估计轴向力f2占据混合轴向力f3的比例。即,通过将由虚拟齿条端轴向力计算单元103计算的虚拟齿条端轴向力f4
pre
和根据估计轴向力f2的分配比例dr
f
设置的增益g1相乘来计算限制轴向力f4,并且增益g1被设置成随着估计轴向力f2的分配比例dr
f
的值变大而较小。因此,限制轴向力f4随着估计轴向力f2的分配比例dr
f
的值变大而变小。因此,由于与混合轴向力f3相加的限制轴向力f4的值根据估计轴向力f2的分配比例dr
f
而减小,因此抑制计算出具有过大的值的最终轴向力f5,即,抑制了向驾驶员施加比所需的转向反作用力更大的转向反作用力。
[0081]
第一实施方式的优点
[0082]
因此,根据第一实施方式,可以实现以下优点。与混合轴向力f3相加的限制轴向力f4的值根据估计轴向力f2的分配比例dr
f
的值而减小。因此,可以防止最终轴向力f5变得过大。作为结果,可以抑制由于向驾驶员施加过量的转向反作用力而给驾驶员带来的不适感。
[0083]
特别地,在估计轴向力f2在混合轴向力f3中的比例较大并且当估计轴向力f2具有较大的值的情况下,第一实施方式更有效。即,当车辆以低速大转弯时,计算限制轴向力f4的情况和由于估计轴向力f2在混合轴向力f3中的比例的增加而导致估计轴向力f2占主要的情况彼此匹配。因此,在轴向力计算单元72采用将限制轴向力f4与混合轴向力f3相加的配置的情况下,限制轴向力f4与具有较大的值的混合轴向力f3相加,因此,最终轴向力f5的值可能会增加过大。另一方面,在第一实施方式中,由于与混合轴向力f3相加的限制轴向力f4的值根据估计轴向力f2的分配比例dr
f
而减小,因此可以防止最终轴向力f5具有过大的
值。
[0084]
第二实施方式
[0085]
下面将描述将转向控制装置应用于线控转向型转向装置的第二实施方式。该实施方式基本上提供了与图1至图3所示的第一实施方式中的配置相同的配置。本实施方式与第一实施方式的不同之处在于轴向力计算单元72中的限制轴向力计算单元的配置。
[0086]
根据转向装置10或控制装置50的产品规格等,可能需要使用转向反作用力将除了方向盘11已经达到虚拟操作范围中的限制位置的情况以外的车辆的其他情况传递给驾驶员。例如,当车辆在停止状态启动时转弯轮16与障碍物诸如路缘石接触的情况可以被认为是需要传递至驾驶员的其他情况。
[0087]
因此,在本实施方式中,采用以下配置作为轴向力计算单元72,以便使用转向反作用力向驾驶员通知车辆的其他情况。如图3中括号中的附图标记所指示的,轴向力计算单元72包括限制轴向力计算单元110而不是限制轴向力计算单元82。
[0088]
限制轴向力计算单元110计算限制轴向力f6,该限制轴向力f6用于在转弯轮16与障碍物接触的情况下限制附加的转弯转向或回程转向。限制轴向力计算单元110基于转弯电机41的电流i
b
的值、目标小齿轮角度θ
p
*、小齿轮角度θ
p
、车辆速度v、转向角度θ
s
以及估计轴向力f2的分配比例dr
f
来计算限制轴向力f6。
[0089]
如图5所示,限制轴向力计算单元110包括微分器111、确定单元112、基准角度设置单元113、差计算单元114、抑制轴向力计算单元(curbing axial force calculating unit)115、增益计算单元116和乘法器117。
[0090]
微分器111通过对小齿轮角度θ
p
进行微分来计算小齿轮角速度ω
p
。确定电路112确定转弯轮16是否与障碍物例如路缘石接触。当满足以下四个确定条件a1至a4中的全部条件时,确定单元112确定转弯轮16与障碍物诸如路缘石接触。
[0091]
|δθp(=|θp*-θp|)|>θpth...(a1)
[0092]
|ib|>ith...(a2)
[0093]
|ωp|<ωth..(a3)
[0094]
|v|<vth...(a4)
[0095]
在确定条件a1中,“θ
p
*”表示由目标小齿轮角度计算单元62计算的目标小齿轮角度,并且“θ
p”表示由小齿轮角度计算单元61计算的实际小齿轮角度。“δθ
p”表示角度差,并且是通过从目标小齿轮角度θp*减去实际小齿轮角度θ
p
而获得的。“θ
th”表示角度差阈值。基于下面的观点来设置角度差阈值θ
pth
。即,当转弯轮16与障碍物接触时,难以将转弯轮16转弯至转弯侧或回程侧。当在这种状态下将方向盘11转向至转弯侧或回程侧时,目标小齿轮角度θ
p
*随着转向而增大,并且转弯角度θ
w
即小齿轮角度θ
p
保持在恒定值。因此,当在转弯轮16与障碍物接触的状态下使转弯轮16额外地转弯的情况下,目标小齿轮角度θ
p
*与小齿轮角度θ
p
之间的差的值增大。因此,随着角度差δθ
p
的绝对值变大,转弯轮16与障碍物接触的可能性变高。因此,角度差δθ
p
是表示转弯轮16将与障碍物接触的概率的值。基于这一点,考虑到由于旋转角度传感器43的噪声等引起的公差,通过实验或模拟来设置角度差阈值θ
pth
。
[0096]
在确定条件a2中,“i
b”表示转弯电机41的电流i
b
的值,“i
th”表示电流阈值。基于以下观点来设置电流阈值i
th
。即,在转弯轮16与障碍物接触的状态下使转轮16额外地转弯的
情况下,转弯电机41的电流i
b
的绝对值增大。因此,随着转弯电机41的电流i
b
的绝对值变大,转弯轮16与障碍物接触的可能性变高。因此,转弯电机41的电流i
b
的值是指示转弯轮16与障碍物接触的概率的值。基于该观点,通过实验或模拟来设置电流阈值i
th
。
[0097]
在确定条件a3中,“ω
p”表示小齿轮角速度,并且是通过对小齿轮角度θ
p
进行微分来获得的。“ω
th”表示角速度阈值。基于下面的观点来设置角速度阈值ω
th
。即,难以在转弯轮16与障碍物接触的状态下使转弯轮16转弯。因此,随着转弯轮16的转弯速度即小齿轮角速度ω
p
的绝对值变小,转弯轮16与障碍物接触的可能性变高。因此,小齿轮角速度ω
p
是指示转弯轮16与障碍物接触的概率的值。基于该观点,考虑到由于旋转角度传感器43的噪声等引起的公差,通过实验或模拟来设置角速度阈值ω
th
。
[0098]
在确定条件a4中,“v”表示车辆速度。“v
th”表示车辆速度阈值,该车辆速度阈值用作确定车辆是否以低速行驶的基准。车辆速度阈值v
th
基于低速区域(等于或高于0km/h且低于40km/h)中的车辆速度v而设置,并且被设置为例如“40km/h”。基于如下观点来设置车辆速度阈值vth:确定转弯轮16是否与障碍物接触,即,如稍后描述的,是否适当地通过迅速改变转向反作用力来向驾驶员通知转弯轮16是否与障碍物接触。
[0099]
例如,当车辆以中速区域(等于或高于40km/h且低于60km/h)或在高速区域(等于或高于60km/h)中的车辆速度v行驶时,可能存在这样的情况:已经向驾驶员通知转弯轮16与障碍物接触,驾驶员没有感觉的余地,并且由驾驶员采取的措施诸如障碍物避免操作是不适当的或困难的。考虑到这样的情况,当车辆以在中速区域或高速区域中的车辆速度v行驶时,几乎没有必要向驾驶员通知转弯轮16与障碍物接触,并且有可能确定转弯轮16是否与障碍物接触将是无用的。因此,在本实施方式中,将车辆以在低速区域中的车辆速度v行驶的条件设置为用于确定转弯轮16是否与障碍物接触的一个确定条件。
[0100]
确定单元112基于转弯轮16是否与障碍物接触的确定结果来设置标志fo的值。当确定转弯轮16不与障碍物接触时,也就是说,当不满足四个确定条件a1至a4中的至少一个确定条件时,确定电路112将标志fo的值设置为“0”。当确定转弯轮16与障碍物接触时,也就是说,当满足四个确定条件a1至a4中的所有确定条件时,确定电路112将标志fo的值设置为“1”。
[0101]
当确定单元112确定转弯轮16与障碍物接触时,即,当由确定单元112设置的标志fo的值为“1”时,基准角度设置单元113基于小齿轮角度θ
p
计算基准角度θ0。通过基于作为转弯角度θ
w
与转向角度θ
s
之比的转向角度比率将小齿轮角度θ
p
转换为转向角度θ
s
来获得基准角度θ0。在本实施方式中,与第一实施方式类似,转向角度比率为“1:1”,并且转向角度比率的值为“1”。
[0102]
当采用将目标小齿轮角度θ
p
*设置为与转向角度θ
s
不同的值的元件作为目标小齿轮角度计算单元62时,基准角度设置单元113基于如图5中的一长两短线所示的转向角度比率和车辆速度v将小齿轮角度θ
p
变换为转向角度θ
s
来计算基准角度θ0。当确定单元112确定转弯轮16未与障碍物接触时,即,当由确定单元112设置的标志fo的值为“0”时,基准角度设置单元113不计算基准角度θ0。
[0103]
当确定单元112确定转弯轮16与障碍物接触时,即,当由确定单元112设置的标志fo的值为“1”时,差计算单元114计算角度差δθ2。角度差δθ2是基准角度θ0与转向角度θ
s
之间的差,所述差是通过从由基准角度设置单元113计算的基准角度θ0减去由转向角度计算
单元51计算的转向角度θ
s
来获取的。当确定单元112确定转弯轮16未与障碍物接触时,即,当由确定单元112设置的标志fo的值为“0”时,差计算单元114不计算角度差δθ2。
[0104]
抑制轴向力计算单元115基于由差计算单元114计算的角度差δθ2来计算抑制轴向力f6
pre
。抑制轴向力计算单元115使用存储在控制装置50的存储单元中的限制轴向力映射m3来计算抑制轴向力f6
pre
。限制轴向力映射m3是如下的映射:横轴表示作为基准角度θ0与转向角度θ
s
之间的差的角度差δθ2的绝对值,纵轴表示抑制轴向力f6
pre
,并且限定了角度差δθ2的绝对值与抑制轴向力f6
pre
之间的关系。例如,限制轴向力映射m3具有以下特性。即,抑制轴向力f6
pre
被设置为随着角度差δθ2的绝对值从“0”增加而较大。基于以下观点来设置抑制轴向力f6
pre
:生成转向反作用力,使得驾驶员转向至转弯轮与障碍物接触的一侧变得困难。
[0105]
增益计算单元116基于由轴向力分配计算单元93计算的估计轴向力f2的分配比例dr
f
来计算增益g2。增益计算单元116使用存储在控制装置50的存储单元中的增益映射m4来计算增益g2。增益映射m4是如下的映射:横轴表示估计轴向力f2的分配比例dr
f
,纵轴表示增益g2,并且限定了分配比例dr
f
与增益g2之间的关系。增益映射m4具有以下特性。即,随着分配比例dr
f
的值从“0”增加,增益g2的值逐渐减小到“0”。
[0106]
乘法器117通过将由抑制轴向力计算单元115计算的抑制轴向力f6
pre
和由增益计算单元116计算的增益g2相乘来计算限制轴向力f6。
[0107]
在该实施方式中,增益计算单元116和乘法器117构成轴向力调节单元,该轴向力调节单元在最终轴向力f5反映限制轴向力f6的情况下基于估计轴向力f2来调节限制轴向力f6的值,该估计轴向力f2是反映施加至转弯轴14的力的轴向力。限制轴向力f6是第二限制轴向力的示例,该第二限制轴向力用于在转弯轮16的转弯操作受到限制的情况下虚拟地限制方向盘11的操作。
[0108]
第二实施方式中的操作
[0109]
下面将描述第二实施方式中的操作。例如,当方向盘11在转弯轮16与障碍物接触的状态下转向时,限制轴向力计算单元110计算限制轴向力f6。因此,将通过将由限制轴向力计算单元110计算的限制轴向力f6与由混合轴向力计算单元81计算的混合轴向力f3相加而获得的值设置为最终轴向力f5。在这种情况下,由于通过将最终轴向力f5转换成转矩获得的经转换的转矩值t2*反映在转向反作用力命令值t*中,所以转向反作用力迅速增大。因此,驾驶员难以在转向角度θ
s
的绝对值增大的方向上操作方向盘11。因此,驾驶员可以通过感觉到触碰到端的感觉作为转向反作用力而识别出转弯轮16与障碍物诸如路缘石接触。
[0110]
通过将限制轴向力f6与混合轴向力f3相加,可能计算出具有过大的值的最终轴向力f5。特别地,当在估计轴向力f2占据混合轴向力f3的分配比例dr
f
变大的状态下即在估计轴向力f2占主要的状态下将最终限制轴向力f6相加时,最终轴向力f5可能具有过大的值。
[0111]
在这一点上,根据第二实施方式,限制轴向力f6的值根据分配比例dr
f
而变化,该分配比例dr
f
是估计轴向力f2占据混合轴向力f3的比例。即,通过将由抑制轴向力计算单元115计算的抑制轴向力f6
pre
和基于估计轴向力f2的分配比例dr
f
设置的增益g2相乘来计算限制轴向力f6,并且增益g2被设置成随着估计轴向力f2的分配比例dr
f
的值变大而较小。因此,随着估计轴向力f2的分配比例dr
f
变大,限制轴向力f6的值变小。因此,由于与混合轴向力f3相加的限制轴向力f6的值根据估计轴向力f2的分配比例dr
f
而减小,因此抑制了计算
出具有过大的值的最终轴向力f5,即,抑制了向驾驶员施加比所需的转向反作用力更大的转向反作用力。
[0112]
第二实施方式的优点
[0113]
因此,根据第二实施方式,可以实现以下优点。(2)当方向盘11在转弯轮16与障碍物接触的状态下操作时,与混合轴向力f3相加的限制轴向力f6的值根据估计轴向力f2的分配比例dr
f
的值而减小。因此,可以防止最终轴向力f5变得过大。作为结果,可以抑制由于向驾驶员施加过量的转向反作用力而给驾驶员带来的不适感。
[0114]
第三实施方式
[0115]
下面将描述将转向控制装置应用于线控转向型转向装置的第三实施方式。该实施方式基本上提供了与图1至图3所示的第一实施方式中的配置相同的配置。本实施方式与第一实施方式的不同之处在于轴向力计算单元72中的限制轴向力计算单元的配置。
[0116]
根据转向装置10或控制装置50的产品规格等,可能需要使用转向反作用力将除了方向盘11已经达到虚拟操作范围中的限制位置的情况以外的车辆的其他情况传递至驾驶员。例如,作为需要传递至驾驶员的其他情况,可以考虑如下情况:因为由于安装在车辆中的电池中的电力不足而供应至转弯电机41的电流即从转弯电机41生成的转矩被限制为小于本该生成的并且不足的转矩的值,转弯轮16的转弯角度θ
w
即小齿轮角度θ
p
不能达到其目标值。
[0117]
因此,在本实施方式中,采用以下配置作为轴向力计算单元72,以便使用转向反作用力向驾驶员通知车辆的其他情况。如图3中括号中的附图标记所指示的,轴向力计算单元72包括限制轴向力计算单元120而不是限制轴向力计算单元82。
[0118]
限制轴向力计算单元120计算限制轴向力f7,该限制轴向力f7用于在供应至转弯电机41的电流即从转弯电机41生成的转矩被限制为小于本该生成的转矩的值的情况下限制附加的转弯转向或回程转向。限制轴向力计算单元120基于目标小齿轮角度θ
p
*、小齿轮角度θ
p
、供应至转弯电机41的电流的限制值i
lim
以及估计轴向力f2的分配比例dr
f
来计算限制轴向力f7。
[0119]
通过设置在控制装置50中的限制值计算单元130来计算限制值i
lim
。限制值计算单元130计算当车载电池的电压vb达到等于或小于电压阈值的值时具有比转弯电机41的额定电流值小的值的限制值i
lim
。限制值计算单元130计算具有随着电压vb的减小而绝对值较小的限制值i
lim
。
[0120]
限制值i
lim
可以被供应至转弯控制单元50b的电力供应控制单元64以及限制轴向力计算单元120。当由限制值计算单元130计算限制值i
lim
时,电力供应控制单元64将要供应至转弯电机41的电流的绝对值与限制值i
lim
进行比较。当要供应至转弯电机41的电流的绝对值大于限制值i
lim
时,电力供应控制单元64将要供应至转弯电机41的电流的绝对值限制为限制值i
lim
。因此,从转弯电机41生成的转矩被限制为与限制值i
lim
相对应的转矩。当要供应至转弯电机41的电流的绝对值等于或小于限制值i
lim
时,电力供应控制单元64将通过电流i
b
的反馈控制计算的原始电流没有改变地供应至转弯电机41。由于转弯电机41的转矩不受限制,因此转弯电机41生成本该要生成的转矩。
[0121]
如图6所示,限制轴向力计算单元120包括减法器121、电流限制轴向力计算单元122、两个增益计算单元123和124以及乘法器125。减法器121通过从目标小齿轮角度θ
p
*减
去小齿轮角度θ
p
来计算角度差δθ
p
。
[0122]
电流限制轴向力计算单元122基于由减法器121计算的角度差δθ
p
来计算电流限制轴向力f7
pre
。电流限制轴向力计算单元122使用存储在控制装置50的存储单元中的限制轴向力映射m5来计算电流限制轴向力f7
pre
。限制轴向力映射m5是如下的映射:横轴表示作为目标小齿轮角度θ
p
*与小齿轮角度θ
p
之间的差的角度差δθ
p
的绝对值,并且纵轴表示电流限制轴向力f7
pre
,并且限定了角度差δθ
p
的绝对值与电流限制轴向力f7
pre
之间的关系。限制轴向力映射m5具有例如以下特性。即,电流限制轴向力f7
pre
被设置为随着角度差δθ
p
的绝对值从“0”增加而较大。电流限制轴向力f7
pre
是基于生成如下转向反作用力的观点来设置的:该转向反作用力对应于被供应至转弯电机41的电流即从转弯电机41生成的转矩的限制程度。
[0123]
该角度差δθ
p
是指示被供应至转弯电机41的电流受到限制的概率的值。即,由于在供应至转弯电机41的电流受到限制的情况下不能使转弯轮16充分地转弯,因此目标小齿轮角度θ
p
*与小齿轮角度θ
p
之间的差随着转弯轮16转弯的更多而增大。因此,随着角度差δθ
p
的绝对值变大,供应至转弯电机41的电流受到限制的可能性变高。
[0124]
增益计算单元123基于由限制值计算单元130计算的限制值i
lim
来计算增益g3。限制值i
lim
是被供应至转弯电机41的电流的限制值。增益计算单元123使用存储在控制装置50的存储单元中的增益映射m6来计算增益g3。增益映射m6是如下的映射:横轴表示限制值i
lim
的绝对值,纵轴表示增益g3,并且限定了限制值i
lim
的绝对值与增益g3之间的关系。增益映射m6具有以下特性。即,增益g3的值随着限制值i
lim
的绝对值增加而逐渐减小到“0”。限制值i
lim
例如是在“1”至“0”的范围内的值。
[0125]
增益g3也是指示被供应至转弯电机41的电流受到限制的概率的值。即,随着被供应至转弯电机41的电流的绝对值被限制为较小的值,限制值i
lim
的绝对值被设置为较小。因此,随着限制值i
lim
的绝对值变小,被供应至转弯电机41的电流的绝对值被限制为较小值的可能性变高。
[0126]
增益计算单元124根据由轴向力分配计算单元93计算的估计轴向力f2的分配比例dr
f
来计算增益g4。增益计算单元116使用存储在控制装置50的存储单元中的增益映射m7来计算增益g4。增益映射m7是如下的映射:横轴表示估计轴向力f2的分配比例dr
f
,纵轴表示增益g4,并且限定了分配比例dr
f
与增益g4之间的关系。增益映射m7具有以下特性。即,随着分配比例dr
f
的值从“0”增加,增益g4的值逐渐减小到“0”。
[0127]
乘法器125通过将由电流限制轴向力计算单元122计算的电流限制轴向力f7
pre
与由增益计算单元123计算的增益g3以及由增益计算单元124计算的增益g4相乘来计算限制轴向力f7。
[0128]
在该实施方式中,增益计算单元124和乘法器125构成轴向力调节单元,该轴向力调节单元根据估计轴向力f2来调节限制轴向力f7的值,该估计轴向力f2是反映当轴向力f5反映限制轴向力f7时施加至转弯轴14的力的轴向力。限制轴向力f7是第三限制轴向力的示例,该第三限制轴向力用于在来自转弯电机41的转矩被限制为小于本该生成的转矩的值的情况下虚拟地限制方向盘11的操作。
[0129]
第三实施方式中的操作
[0130]
下面将描述第三实施方式中的操作。例如,在供应至转弯电机41的电流受到限制
的情况下,限制轴向力计算单元120计算限制轴向力f7。因此,将通过将由限制轴向力计算单元120计算的限制轴向力f7与由混合轴向力计算单元81计算的混合轴向力f3相加而获得的值设置为最终轴向力f5。在这种情况下,由于通过将最终轴向力f5转换成转矩获得的经转换的转矩值t2*反映在转向反作用力命令值t*中,所以转向反作用力迅速增大。因此,驾驶员难以在转向角度θ
s
的绝对值增大的方向上操作方向盘11。因此,驾驶员可以通过感觉到触碰到端的感觉作为转向反作用力而识别出供应至转弯电机41的电流即从转弯电机41生成的转矩受到限制。
[0131]
通过将限制轴向力f7与混合轴向力f3相加,可能计算出具有过大的值的最终轴向力f5。特别地,当在估计轴向力f2占据混合轴向力f3的分配比例dr
f
变大的状态下即在估计轴向力f2占主要的状态下将最终限制轴向力f7相加时,最终轴向力f5可能具有过大的值。
[0132]
在这一点上,根据第三实施方式,限制轴向力f7的值根据分配比例dr
f
而变化,该分配比例dr
f
是估计轴向力f2占据混合轴向力f3的比例。即,通过将由电流限制轴向力计算单元122计算的电流限制轴向力f7
pre
和基于限制值i
lim
的增益g3和基于分配比例dr
f
的增益g4相乘来计算限制轴向力f7,并且增益g4被设置为随着估计轴向力f2的分配比例dr
f
的值变大而较小。因此,随着估计轴向力f2的分配比例dr
f
的值变大,限制轴向力f7的值变小。因此,由于与混合轴向力f3相加的限制轴向力f7的值根据估计轴向力f2的分配比例dr
f
而减小,因此抑制计算出具有过大的值的最终轴向力f5,即,抑制了向驾驶员施加比所需的转向反作用力更大的转向反作用力。
[0133]
第三实施方式的优点
[0134]
因此,根据第三实施方式,可以实现以下优点。在供应至转弯电机41的电流受到限制的情况下,与混合轴向力f3相加的限制轴向力f7的值根据估计轴向力f2的分配比例dr
f
的值而减小。因此,可以防止最终轴向力f5的值变得过大。作为结果,可以抑制由于向驾驶员施加过量的转向反作用力而给驾驶员带来的不适感。
[0135]
第四实施方式
[0136]
下面将描述将转向控制装置应用于线控转向型转向装置的第四实施方式。该实施方式基本上提供了与图1至图4所示的第一实施方式中的配置相同的配置。本实施方式与第一实施方式的不同之处在于混合轴向力计算单元81的配置。此外,本实施方式也可以应用于以上描述的第二实施方式或第三实施方式。
[0137]
如图7所示,混合轴向力计算单元81除了理想轴向力计算单元91、估计轴向力计算单元92和轴向力分配计算单元93之外,还包括估计轴向力计算单元94。估计轴向力计算单元94基于由设置在车辆中的横向加速度传感器502检测到的横向加速度la来计算作用在转弯轴14上的估计轴向力f8。通过将作为基于车辆速度v的系数的增益与横向加速度la相乘来计算估计轴向力f8。路面状态或车辆行为反映在横向加速度la中。因此,路面状态或车辆行为反映在基于横向加速度la计算的估计轴向力f8中。
[0138]
轴向力分配计算单元93接收理想轴向力f1以及估计轴向力f2和f8。然后,轴向力分配计算单元93基于反映车辆行为、路面状态或转向状态的各种状态参数分别设置针对理想轴向力f1和估计轴向力f2和f8的分配比例。轴向力分配计算单元93通过将理想轴向力f1和估计轴向力f2和f8与分别设置的分配比例相乘而获得的值相加来计算混合轴向力f3。轴向力分配计算单元93将估计轴向力f2的分配比例dr
f
供应至限制轴向力计算单元82。
[0139]
基于小齿轮角度θ
p
的理想轴向力f1以及基于横向加速度la的估计轴向力f2和f8是当高载荷的力未施加至转弯轴14时不反映高载荷的力的轴向力。基于转弯电机41的电流i
b
的估计轴向力f2是当高载荷的力施加至转弯轴14时反映高载荷的力的轴向力。作为施加至转弯轴14的高载荷的力的情况,例如,可以考虑发生转弯轴14的端与未示出的壳体接触的端接触的情况,或者转弯轮16与障碍物例如路缘石接触的情况。
[0140]
第四实施方式中的操作
[0141]
下面将描述第四实施方式中的操作。基于小齿轮角度θ
p
的理想轴向力f1、基于反映路面状态的状态参数(i
b
)的估计轴向力f2和基于反映路面状态或车辆行为的状态参数(la)的估计轴向力f8以预定的分配比例相加。因此,计算更精细地反映路面状态或车辆行为的混合轴向力f3。由于混合轴向力f3反映在转向反作用力命令值t*中,因此基于路面状态、车辆行为或转向状态的较小的转向反作用力被施加至方向盘11。
[0142]
在方向盘11达到虚拟操作范围的限制位置之后,用于限制方向盘11的操作的限制轴向力f4迅速增加。由于限制轴向力f4与混合轴向力f3相加,所以担心的是,将计算出具有过大的值的最终轴向力f5。
[0143]
例如,当在方向盘11的操作位置达到虚拟操作范围的限制位置附近的状态下转弯轮16与障碍物诸如路缘石等接触时,基于转弯电机41的电流i
b
的估计轴向力f2具有较大的值。这是因为估计轴向力f2反映了施加至转弯轴14的力。从使用转向反作用力将路面状态或转弯轮16的转弯状态传递至驾驶员的角度来看,估计轴向力f2在混合轴向力f3中的比例增加。即,由于将限制轴向力f4以较大的值与混合轴向力f3相加,所以最终轴向力f5的值可能变得过大。
[0144]
在这一点上,根据第四实施方式,限制轴向力f4的值根据估计轴向力f2的分配比例dr
f
即估计轴向力f2在混合轴向力f3中的比例而变化。即,通过将由虚拟齿条端轴向力计算单元103计算的虚拟齿条端轴向力f4
pre
与基于分配比例dr
f
的增益g1相乘来计算限制轴向力f4,并且增益g1被设置为随着分配比例dr
f
的值变大而较小。因此,随着分配比例dr
f
的值变大,限制轴向力f4变小。因此,由于与混合轴向力f3相加的限制轴向力f4的值根据分配比例dr
f
而减小,因此抑制计算出具有过大的值的最终轴向力f5,即,抑制了向驾驶员施加比所需的转向反作用力更大的转向反作用力。
[0145]
第四实施方式的优点
[0146]
因此,根据第四实施方式,可以实现以下优点。当计算限制轴向力f4时,限制轴向力f4的值根据估计轴向力f2的分配比例dr
f
的值而减小。由于与混合轴向力f3相加的限制轴向力f4的值减小,因此可以防止最终轴向力f5变得过大。作为结果,可以抑制由于向驾驶员施加过量的转向反作用力而给驾驶员带来的不适感。
[0147]
第五实施方式
[0148]
下面将描述将转向控制装置应用于线控转向型转向装置的第五实施方式。该实施方式基本上提供了与图1至图4所示的第一实施方式中的配置相同的配置。本实施方式与第一实施方式的不同之处在于轴向力计算单元72的配置。此外,本实施方式也可以应用于以上描述的第二实施方式至第四实施方式。
[0149]
如图8a所示,轴向力计算单元72包括最大值选择单元85,而不是图3所示的加法器83。最大值选择单元85接收由混合轴向力计算单元81计算的混合轴向力f3和由限制轴向力
计算单元82计算的限制轴向力f4。最大值选择单元85选择混合轴向力f3和限制轴向力f4中的具有较大绝对值的一个,并将所选择的混合轴向力f3或限制轴向力f4设置为最终轴向力f5,该最终轴向力f5用于计算转向反作用力命令值t*。
[0150]
当采用这种配置时,将混合轴向力f3和限制轴向力f4中具有较大绝对值的轴向力设置为最终轴向力f5,该最终轴向力f5用于计算转向反作用力命令值t*。由于没有将限制轴向力f4与混合轴向力f3相加,所以可以防止最终轴向力f5的值变得过大。因此,可以抑制由于向驾驶员施加过量的转向反作用力而给驾驶员带来的不适感。
[0151]
然而,尽管通过限制轴向力计算单元82计算用于虚拟地限制方向盘11的操作范围的适当的限制轴向力f4,但是担心的是,可能不使用限制轴向力f4。其示例是混合轴向力f3大于限制轴向力f4的情况。因此,在本实施方式中,限制轴向力计算单元82采用以下的配置。
[0152]
即,限制轴向力计算单元82接收作为不反映施加至转弯轴14的力的轴向力的理想轴向力f1的分配比例dr
f2
,而不是估计轴向力f2的分配比例dr
f
。如图8b所示,增益计算单元104使用具有与图4所示的增益映射m2的特性相反的特性的增益映射m8来计算增益g5。增益映射m8具有以下特性。即,增益g5的值设置为随着分配比例dr
f2
的值从“0”增加而较大。图4所示的乘法器105通过将由虚拟齿条端轴向力计算单元103计算的虚拟齿条端轴向力f4
pre
与增益g5相乘来计算限制轴向力f4。
[0153]
在本实施方式中,最大值选择单元85是计算最终轴向力f5的最终轴向力计算单元的示例,该最终轴向力f5是反映在转向反作用力命令值t*中的最终轴向力。
[0154]
第五实施方式的操作和优点
[0155]
因此,根据第五实施方式可以实现以下操作和优点。
[0156]
随着理想轴向力f1的分配比例dr
f2
变大,由限制轴向力计算单元82计算的限制轴向力f4的值变大。因此,当方向盘11的操作位置接近虚拟操作范围的限制位置并且通过限制轴向力计算单元82计算限制轴向力f4时,限制轴向力f4可能具有比混合轴向力f3大的值。因此,最大值选择单元85可能将用于虚拟地限制方向盘11的操作范围的限制轴向力f4设置为用于计算转向反作用力命令值t*的最终轴向力f5。作为结果,驾驶员可以通过感觉到更适当的转向反作用力作为响应识别出方向盘11已经达到虚拟操作范围的限制位置。
[0157]
第六实施方式
[0158]
将描述将转向控制装置应用于电动助力转向装置(eps)的第六实施方式。与第一实施方式中相同的元件将由相同的附图标记表示,并且将省略其详细描述。
[0159]
在eps中,图1所示的方向盘11和转弯轮16彼此机械连接。即,转向轴12、小齿轮轴13和转弯轴14用作方向盘11与转弯轮16之间的动力传递路径。通过使转弯轴14随着方向盘11的旋转操作而线性移动,转弯轮16的转弯角度θ
w
变化。eps包括辅助电机,该辅助电机设置在与图1所示的转弯电机41相同的位置。辅助电机生成转向辅助力,该转向辅助力是与转向方向相同方向上的转矩。
[0160]
如图9所示,eps 200的控制装置201通过控制至辅助电机202的电力供应来执行用于基于转向转矩th生成转向辅助力的辅助控制。控制装置201基于由转矩传感器34检测到的转向转矩th、由车辆速度传感器501检测到的车辆速度v以及由设置在辅助电机202中的旋转角度传感器203检测到的旋转角度θ来控制至辅助电机202的电力供应。
[0161]
控制装置201包括小齿轮角度计算单元211、辅助命令值计算单元212和电力供应控制单元213。小齿轮角度计算单元211接收辅助电机202的旋转角度θ
m
并基于所接收的旋转角度θ
m
来计算小齿轮角度θ
p
,小齿轮角度θ
p
是小齿轮轴44的旋转角度。辅助命令值计算单元212基于转向转矩t
h
和车辆速度v来计算辅助命令值t
as
*。辅助命令值t
as
*是与要从辅助电机202生成的转矩相对应的值。电力供应控制单元213基于辅助命令值t
as
*将电力供应至辅助电机202。电流传感器214设置在至辅助电机202的供电路径上。电流传感器214检测供应至辅助电机202的电流i
m
的实际值。
[0162]
下面将详细描述辅助命令值计算单元212的配置。辅助命令值计算单元212包括辅助转矩计算单元221、轴向力计算单元222和减法器223。
[0163]
辅助转矩计算单元221基于转向转矩t
h
和车辆速度v计算辅助转矩t
as1
*。辅助转矩计算单元221计算辅助转矩t
as1
*,使得辅助转矩t
as1
*的绝对值随着转向转矩t
h
的绝对值变大以及随着车辆速度v变低而变大。
[0164]
轴向力计算单元222具有与图3所示的轴向力计算单元72相同的计算功能。轴向力计算单元222基于由电流传感器214检测到的辅助电机202的电流i
m
的值、由小齿轮角度计算单元211计算的小齿轮角度θ
p
以及由车辆速度传感器501检测到的车辆速度v计算施加至转弯轴14的最终轴向力f5,并且通过将最终轴向力f5转换为转矩来计算经转换的转矩值t
as2
*。
[0165]
减法器223通过从由辅助转矩计算单元221计算的辅助转矩t
as1
*中减去由轴向力计算单元222计算的经转换的转矩值t
as2
*来计算辅助命令值t
as
*。
[0166]
eps的控制装置201还可以具有以下功能:执行用于虚拟地限制方向盘11的操作范围的第一控制;执行用于限制在转弯轮16与障碍物接触的状态下的转向的第二控制;执行用于限制在供应至转弯电机41的电流受到限制的状态下的转向的第三控制。在这种情况下,当执行第一控制至第三控制中的至少一个控制时,担心的是,过度的转向辅助力将被施加至方向盘11。
[0167]
因此,本实施方式中的轴向力计算单元222具有与图4至图6所示的限制轴向力计算单元82、110和120之一相同的计算功能。也就是说,当控制装置201具有执行第一控制的功能时,采用与图4所示的限制轴向力计算单元82相同的配置作为轴向力计算单元222。当控制装置201具有执行第二控制的功能时,采用与图5所示的限制轴向力计算单元110相同的配置作为轴向力计算单元222。当控制装置201具有执行第三控制的功能时,采用与图6所示的限制轴向力计算单元120相同的配置作为轴向力计算单元222。
[0168]
可以采用与图7所示的第四实施方式中的混合轴向力计算单元81相同的配置作为轴向力计算单元222的混合轴向力计算单元。可以采用与图9所示的第五实施方式中的轴向力计算单元72相同的配置作为轴向力计算单元222。
[0169]
第六实施方式的优点
[0170]
因此,根据第六实施方式可以实现以下优点。例如,当计算限制轴向力f4、f6和f7时,限制轴向力f4、f6和f7的值根据反映经由转弯轮16施加至转弯轴14的力的估计轴向力f2的分配比例dr
f
的值而减小。由于与混合轴向力f3相加的限制轴向力f4、f6和f7的值减小,所以可以防止最终轴向力f5的值变得过大。因此,可以抑制由于向驾驶员施加过量的转向辅助力而给驾驶员带来的不适感。
[0171]
其他实施方式
[0172]
上述实施方式可以进行如下修改。
[0173]-在第四实施方式中,如图7中括号中的附图标记所指示的,估计轴向力计算单元94可以基于由设置在车辆中的横摆率传感器505检测到的横摆率yr而不是横向加速度la或者除了横向加速度la以外基于所述横摆率yr来计算施加至转弯轴14的估计轴向力f12。通过将横摆率微分值乘以车辆速度增益来计算估计轴向力f12,该横摆率微分值是通过对横摆率yr进行微分而获得的值,该车辆速度增益是基于车辆速度v的系数。车辆速度增益被设置为随着车辆速度v变高而变大。横摆率yr反映路面状态诸如路面摩擦阻力或车辆行为。因此,基于横摆率yr计算的估计轴向力f12反映了实际路面状态或车辆行为。
[0174]-在第四实施方式中,混合轴向力计算单元81除了估计轴向力计算单元92之外还可以包括一个或两个或更多个估计轴向力计算单元,所述估计轴向力计算单元计算反映施加至转弯轴14的具有高载荷的力的轴向力。其他估计轴向力计算单元除了供应至转弯电机41的电流i
b
之外基于路面状态或反映施加至转弯轴14的力的状态参数来计算施加至转弯轴14的其他估计轴向力。轴向力分配计算单元93通过将估计轴向力f2和其他估算轴向力的分配比例相加来计算分配比例dr
f
,并将分配比例dr
f
作为经计算的总和供应至限制轴向力计算单元82。因此,当计算限制轴向力f4时,限制轴向力f4的值根据作为总和的分配比例dr
f
而减小。由于与混合轴向力f3相加的限制轴向力f4的值减小,因此可以防止最终轴向力f5的值变得过大。
[0175]
在第一实施方式至第六实施方式中,理想轴向力计算单元91在计算理想轴向力f1时可以不必考虑车辆速度v。在第一实施方式至第五实施方式中,目标转向反作用力计算单元71可以仅基于转向转矩t
h
来计算目标转向反作用力t1*。在第六实施方式中,辅助转矩计算单元221可以仅基于转向转矩t
h
来计算辅助转矩t
as1
*。
[0176]
在第一实施方式至第五实施方式中,可以采用以下配置作为转向反作用力命令值计算单元52。即,转向反作用力命令值计算单元52基于转向转矩t
h
来计算目标转向转矩,并通过转向转矩t
h
的反馈控制来计算第一转向反作用力命令值,使得转向转矩t
h
的检测值可以达到目标转向转矩。类似于第一实施方式至第五实施方式,转向反作用力命令值计算单元52基于小齿轮角度θ
p
、转弯电机41的电流i
b
的值以及车辆速度v来计算最终轴向力f5。转向反作用力命令值计算单元52基于转向转矩t
h
、第一转向反作用力命令值、最终轴向力f5和车辆速度v来计算目标转向角,并且通过转向角度θ
s
的反馈控制来计算第二转向反作用力命令值使得转向角度θ
s
可以达到目标转向角。转向反作用力命令值计算单元52通过将第一转向反作用力命令值和第二转向反作用力命令值相加来计算转向反作用力命令值t*。
[0177]
在第一实施方式至第五实施方式中,可以在转向装置10中设置离合器。在这种情况下,如图2中的交替的一长两短线所示,转向轴12和小齿轮轴13经由离合器21连接。采用电磁离合器作为离合器21,该电磁离合器通过间断至励磁线圈的电力供应来间断电力供应。控制装置50执行用于在接合状态与分离状态之间切换离合器21的接合/分离控制。当离合器21分离时,机械地切断方向盘11与转弯轮16之间的动力传递。当离合器21接合时,机械地允许方向盘11与转弯轮16之间的动力传递。
[0178]
在第一实施方式至第四实施方式中,可以采用以下配置作为限制轴向力计算单元82、110和120。即,随着不反映施加于转弯轴14的力的轴向力(f1、f8)的分配比例dr
f2
的值或
者作为针对不反映施加至转弯轴14的力的多个轴向力而各自设置的分配比例的总和的分配比例dr
f2
的值增加,限制轴向力f4、f6和f7的值增加。在这种情况下,图4至图6中所示的增益映射m2、m4和m7的特性被设置为如下,其中横轴被设置为分配比例dr
f2
。即,随着分配比例dr
f2
的值从“0”增加,增益g1、g2和g4被设置为较大。因此,由于限制轴向力f4、f6和f7在最终轴向力f5中的比例增加,因此可以更适当地限制方向盘11的操作。
[0179]
在第一实施方式至第四实施方式和其他实施方式中,可以采用以下配置作为限制轴向力计算单元82、110和120。即,当反映施加至转弯轴14的力的轴向力(f2)的分配比例dr
f
小于不反映施加至转弯轴14的力的轴向力(f1、f8)的分配比例dr
f2
时,随着分配比例dr
f
的值增加,限制轴向力f4、f6和f7的值增加。当作为针对反映施加至转弯轴14的轴向力的一个或两个或更多个轴向力而各自设置的分配比例的总和的分配比例dr
f
小于作为针对不反映施加至转弯轴14的力的多个轴向力而各自设置的分配比例的总和的分配比例dr
f2
时,这同样适用。因此,可以向驾驶员给出反映经由转弯轮16施加至转弯轴14的力的更适当的转向反作用力。
[0180]
在第一实施方式至第四实施方式和其他实施方式中,可以采用以下配置作为限制轴向力计算单元82、110和120。即,当反映施加至转弯轴14的力的轴向力(f2)的分配比例dr
f
大于不反映施加至转弯轴14的力的轴向力(f1、f8)的分配比例dr
f2
时,随着分配比例dr
f
的值增加,限制轴向力f4、f6和f7的值降低。当作为针对反映施加至转弯轴14的轴向力的一个或两个或更多个轴向力而各自设置的分配比例的总和的分配比例dr
f
大于作为针对不反映施加至转弯轴14的力的多个轴向力而各自设置的分配比例的总和的分配比例dr
f2
时,这同样适用。因此,可以抑制计算出具有过大的值的最终轴向力f5,并且可以抑制向驾驶员给出反映经由转弯轮16施加至转弯轴14的力的更适当的转向反作用力。
[0181]
在第一实施方式至第四实施方式中,可以采用以下配置作为轴向力计算单元72。即,基于增益映射m2、m4和m7计算的增益g1、g2和g4可以与由轴向力计算单元72的加法器83计算的最终轴向力f5(见图3)相乘,而不是与虚拟齿条端轴向力f4
pre
(见图4)、抑制轴向力f6
pre
(见图5)或电流限制轴向力f7
pre
(见图6)相乘。在这种情况下,也可以抑制计算出具有过大的值的最终轴向力f5。
[0182]
在第一实施方式至第四实施方式中,可以采用以下配置作为轴向力计算单元72。即,基于增益映射(gain map)m2、m4和m7计算的增益g1、g2和g4可以与反映施加至转弯轴14的力的估计轴向力f2或混合轴向力f3(见图4)相乘,而不是与虚拟齿条端轴向力f4
pre
(见图4)、抑制轴向力f6
pre
(见图5)或电流限制轴向力f7
pre
(见图6)相乘。在这种情况下,也可以抑制计算出具有过大的值的最终轴向力f5。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1