一种自适应水位系留浮标及其自适应方法与流程
[0001]
本发明涉及浮标技术领域,具体为一种自适应水位系留浮标及其自适应方法。
背景技术:
[0002]
水利发电作为一种高效清洁的能源,在我国电力能源结构中占据了很大的比例。坝式水电站以发电为主,兼有航运、过木(竹)、防洪等综合功能;面对上述综合功能需求,为了保证电站的安全运行,提升电力系统的安全稳定,水库堤坝会设置禁止外来船只进入的警戒线,以达到警示提醒的效果。
[0003]
而现有的警戒线设置由浮标和锚链连接而成,两端用混凝土锚桩固定后对大坝上游警戒区封闭,浮标水面上部分设立警示标语,该种方式需要人工解除锚链连接,费时费力,并且负责看守警戒线,费时费力;另外一种方案是在水面放置系留式浮标用以警示,该系留式浮标采用锚链固定在某一水区,适合放置在流动水面,但现有的系留浮标无法适应水位变化,尤其是在汛期或旱期时,水库的水位变化很大,常规的系留无法适应水位的变化,容易发生锚块蛙跳、浮标被淹没或者飘远的情况,导致警示区域模糊,存在安全风险,造成行船危险。
技术实现要素:
[0004]
本发明的目的在于提供一种自适应水位系留浮标及其自适应方法,以解决上述背景技术中提出的系留式浮标无法适应水位变化导致的水域警示存在的安全问题。
[0005]
为实现上述目的,本发明提供如下技术方案,一种自适应水位系留浮标,包括浮标本体、锚链和重力锚,所述重力锚固定在水底,该浮标本体通过锚链与重力锚固定,所述浮标本体上设有可收放锚链的驱动组件、电源组件、控制线板以及可感应浮标本体沉浸在水中的液位高度变化的第一感应组件、可感应锚链与浮标本体之间角度变化的第二感应组件,其中,所述第一感应组件、第二感应组件均通过控制线板与驱动组件联动,所述电源组件与控制线板连接用以供电。
[0006]
优选的,所述浮标本体上对应驱动组件的锚链输出处开有输出通道,且该输出通道内可360
°
活动连接有座管套,所述锚链穿过座管套输出,且所述第二感应组设在座管套上。
[0007]
优选的,所述驱动组件包括可卷收锚链的绞盘和驱动电机,所述驱动电机的输出端与绞盘连接联动,且所述浮标本体上对应驱动电机罩设有防护罩;所述电源组件包括蓄电池和光伏板,所述浮标本体内嵌设有电池腔,所述蓄电池、控制线板均设在电池腔内,该蓄电池与控制线板电接,所述光伏板加设在浮标本体顶部并与蓄电池连接;所述第一感应组件为均匀围设在浮标本体外壁上的液位液位传感器;所述第二感应组件为角度传感器。
[0008]
优选的,所述浮标本体顶部还设有警示装置,该警示装置包括警示灯、警示标识,所述警示灯与控制线板电接。
[0009]
优选的,所述浮标本体内还设有用以平衡电源组件的配重块,从而达到稳定浮标
本体漂浮在水面上的效果。
[0010]
一种如上述所述自适应水位系留浮标的自适应方法,包括如下技术步骤:
[0011]
s1.采集k个时刻传感器的感测的数据并传送到控制线板;
[0012]
s2.控制线板对接收到的数据进行滤波计算;
[0013]
s3.控制线板根据滤波计算结果控制驱动电机调节调整绞盘,以达到根据当前水位或当前锚链与浮标本体之间的角度调整锚链输出长度,使得浮标适应水位变化。
[0014]
优选的,所述s1步骤中采集的数据分别为:
[0015]
a、采集浮标本体外壁上k个时刻所有第一感应组件感测到的液位高度数据并传送给控制线板;
[0016]
b、采集k个时刻第二感应组件的数据发送到控制线板;
[0017]
针对两种方案采集的数据,s2步骤采用的滤波计算方法,以及s3步骤执行绞盘调整具体如下:
[0018]
a方案的滤波计算方法如下:
[0019]
①
控制线板先计算k个时刻所有液位传感器的均值和方差,均值表示为方差表示为[σ(t-k),σ(t-k+1),
…
σ(t)];
[0020]
②
根据水面平静和不平静两种状态,对k个时刻液位传感器的数据进行滤波计算,该滤波算法为:
[0021][0022]
其中,根据水面状态,k的取值为:
[0023][0024]
其中,为水面不平静状态下的取值;
[0025]
为水面平静状态下的取值;
[0026]
a方案的绞盘调整方法具体为:
[0027]
设定浮标本体自由漂浮时的目标液位高度为h0(液位传感器下沿距水面的距离),控制线板的液位设定上下限分别设为h0+a及h0+b,其中,h0于投放时测定,a、b的值经实验确定其合理取值(b>a>0);在t时刻,具体的执行规则为:
[0028]
①
若无论当前驱动电机处于何种动作,均转动驱动电机使其进行收锚链的动作;
[0029]
②
若并且当前驱动电机处于收锚链的动作时,继续保持
收锚链;
[0030]
③
若并且当前驱动电机处于收锚链的动作(或已处于停止状态),停止驱动电机转动;
[0031]
④
若无论当前驱动电机处于何种动作,均转动驱动电机使其进行放锚链的动作;
[0032]
⑤
若并且当前驱动电机处于放锚链的动作(或已处于停止状态),停止驱动电机转动;
[0033]
⑥
若发生不符合以上条件的情况,不产生动作信号;
[0034]
b方案的执行的滤波计算方法如下:
[0035][0036]
其中k取值为10;
[0037]
b方案的绞盘调整方法具体为:
[0038]
设定角度的上限值α
max
,在t时刻的执行规则为:
[0039]
①
若转动驱动电机使其进行收锚链,
[0040]
②
若并且当前驱动电机处于收锚链的动作
[0041]
时,继续保持收锚链;
[0042]
③
若不产生动作信号。
[0043]
优选的,当a方案和b方案结果冲突时,控制线板优先执行方案a方案结果。
[0044]
优选的,还包括对第二感应组件的故障检测方法,具体算法如下:
[0045]
设同一时刻第二感应组件即液位传感器采样得到的数据为h=[h1,h2,
……
h
n
],使用以下算法判断是否有数据异常:
[0046]
①
计算平均值及标准差
[0047][0048]
②
对所有h
i
,依次计算并判断是否如果有成立,则对该传感器进行标记,同时其对应的传感器数据移除出序列h,对剩余的数据重新计算新的平均值及标准差(重复执行步骤1和2),直到所有数据满足
[0049]
③
得到被标记过的液位传感器集合λ(如λ=[1,3,5]表示第1,3,5号液位传感器数据可能异常);
[0050]
每一个采样时刻执行以上计算,若任一液位传感器连续m个时刻被标记,则产生液
位传感器故障信号。
[0051]
优选的,还包括异常检测处理情况,具体如下:
[0052]
①
若液位传感器故障检测算法中产生故障信号,控制线板控制外部输出电路,使警示灯发出每5秒闪烁一次的故障信号;
[0053]
②
在异常状况下,如执行机构卡死或蓄电池点亮不足等,可能导致系统工作不正常。对此,若判定连续10个采样时间或成立,控制线板控制外部输出电路,使警示灯发出每1秒闪烁一次的故障信号;
[0054]
③
若连续10个采样时间控制线板控制外部输出电路,使警示灯发出每3秒闪烁一次的故障信号。
[0055]
与现有技术相比,本发明的有益效果是:通过设置液位传感器为第一感应组件、角度传感器为第二感应组件,当水位发生变化时,液位传感器感测浮标本体在水中的液位高度变化,并进行滤波计算后,控制线板根据计算结果通过及时收或放锚链达到调整浮标本体的液位高度控制在[h0+a,h0+b]之间;同时,也可以通过角度传感器感应锚链与浮标本体之间角度变化,通过滤波计算来及时收或放锚链达到调整浮标本体与锚链角度因为水浮力基本保持竖直方向,以上两种均能够达到浮标本体及时适应水位变化,防止浮标本体锚块蛙跳、浮标被淹没或者飘远的情况,以达到良好的警示提醒效果。
附图说明
[0056]
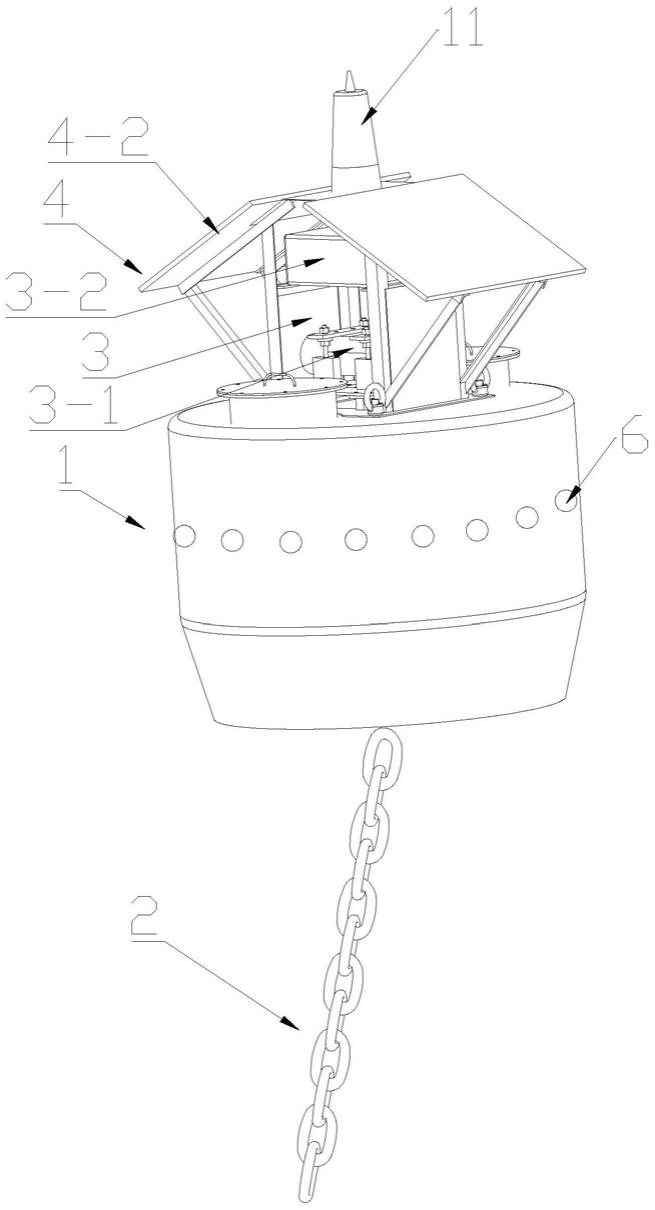
图1为本发明结构示意图;
[0057]
图2为本发明内部结构示意图;
[0058]
图中:1.浮标本体、2.锚链、3.驱动组件、3-1.绞盘、3-2.驱动电机、4.电源组件、4-1、蓄电池、4-2.光伏板、5.控制线板、6.第一感应组件、7.第二感应组件、8.输出通道、9.座管套、10.电池腔、11.警示装置、12.配重块。
具体实施方式
[0059]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0060]
请参阅图1-2,本发明提供一种技术方案:一种自适应水位系留浮标,包括浮标本体1、锚链2和重力锚,所述重力锚固定在水底,该浮标本体1通锚链2与重力锚固定,所述浮标本体1上设有可收放锚链的驱动组件3、电源组件4、控制线板5以及可感应浮标本体1沉浸在水中的液位高度变化的第一感应组件6、可感应锚链2与浮标本体1之间角度变化的第二感应组件7,其中,所述第一感应组件6、第二感应组件7均通过控制线板5与驱动组件3联动,所述电源组件4与控制线板5连接用以供电,其中,所述浮标本体1上对应驱动组件3的锚链2输出处开有输出通道8,且该输出通道8内可360
°
活动连接有座管套9,所述锚链2穿过座管套9输出,且所述第二感应组7设在座管套9上,所述驱动组件3包括可卷收锚链2的绞盘3-1和驱动电机3-2,所述驱动电机3-2的输出端与绞盘3-1连接联动,且所述浮标本体1上对应
驱动电机3-2罩设有防护罩;所述电源组件4包括蓄电池4-1和光伏板4-2,所述浮标本体1内嵌设有电池腔10,所述蓄电池4-1、控制线板5均设在电池腔10内,该蓄电池4-1与控制线板5电接,所述光伏板4-2加设在浮标本体1顶部并与蓄电池4-1连接;所述第一感应组件6为均匀围设在浮标本体1外壁上的液位传感器;所述第二感应组件7为角度传感器,此处可以采用陀螺仪代替,另外,所述浮标本体1顶部还设有警示装置11,该警示装置11包括警示灯、警示标识,所述警示灯与控制线板5电接,所述浮标本体1内还设有用以平衡电源组件的配重块12,其中,所述浮标本体1上与电池腔10相对称的一侧设有配重腔,所述配重块12分别设在配重腔、浮标本体1底部,其中配重腔内的配重块与蓄电池4-1相当,从而达到稳定浮标本体1漂浮在水面上的效果。
[0061]
一种如上述所述自适应水位系留浮标的自适应方法,包括如下技术步骤:
[0062]
s1.采集k个时刻传感器的感测的数据并传送到控制线板5;
[0063]
s2.控制线板5对接收到的数据进行滤波计算;
[0064]
s3.控制线板5根据滤波计算结果控制驱动电机3-2调节调整绞盘3-1,以达到根据当前水位调整锚链2输出长度,使得浮标适应水位变化。
[0065]
所述s1步骤中采集的数据分别为:
[0066]
a、采集浮标本体1外壁上k个时刻所有第一感应组件6感测到的液位高度数据并传送给控制线板5;
[0067]
b、采集k个时刻第二感应组件7的数据发送到控制线板5;
[0068]
针对两种方案采集的数据,s2步骤采用的滤波计算方法,以及s3步骤执行绞盘3-1调整具体如下:
[0069]
a方案的滤波计算方法如下:
[0070]
(1)控制线板5先计算k个时刻所有液位传感器的均值和方差,均值表示为方差表示为[σ(t-k),σ(t-k+1),
…
σ(t)];
[0071]
(2)根据水面平静和不平静两种状态,对k个时刻液位传感器的数据进行滤波计算,该滤波算法为:
[0072][0073]
其中,根据水面状态,k的取值为:
[0074][0075]
其中,为水面不平静状态下的取值;
[0076]
为水面平静状态下的取值;
[0077]
a方案的绞盘3-1调整方法具体为:
[0078]
设定浮标本体1自由漂浮时的目标液位高度为h0(液位传感器下沿距水面的距
离),控制线板5的液位设定上下限分别设为h0+a及h0+b,其中,h0于投放时测定,a、b的值经实验确定其合理取值(b>a>0);在t时刻,具体的执行规则为:
[0079]
①
若无论当前驱动电机3-2处于何种动作,均转动驱动电机3-2使其进行收锚链2的动作;
[0080]
②
若并且当前驱动电机3-2处于收锚链2的动作时,继续保持收锚链2;
[0081]
③
若并且当前驱动电机3-2处于收锚链2的动作(或已处于停止状态),停止驱动电机3-2转动;
[0082]
④
若无论当前驱动电机3-2处于何种动作,均转动驱动电机3-2使其进行放锚链2的动作;
[0083]
⑤
若并且当前驱动电机3-2处于放锚链2的动作(或已处于停止状态),停止驱动电机3-2转动;
[0084]
⑥
若发生不符合以上条件的情况,不产生动作信号;
[0085]
b方案的执行的滤波计算方法如下:
[0086][0087]
其中k取值为10;
[0088]
b方案的绞盘3-1调整方法具体为:
[0089]
设定角度的上限值α
max
,在t时刻的执行规则为:
[0090]
①
若转动驱动电机3-2使其进行收锚链2,
[0091]
②
若并且当前驱动电机3-2处于收锚链2的动作时,继续保持收锚链2;
[0092]
③
若不产生动作信号。
[0093]
α
max
的优选值为15-20度。
[0094]
当a方案和b方案结果冲突时,控制线板5优先执行方案a方案结果。
[0095]
还包括对第二感应组件7的故障检测方法,具体算法如下:
[0096]
设同一时刻第二感应组件7即液位传感器采样得到的数据为h=[h1,h2,
……
h
n
],使用以下算法判断是否有数据异常:
[0097]
①
计算平均值及标准差
[0098][0099]
②
对所有h
i
,依次计算并判断是否如果有成立,则对该液位传感器进行标记,同时其对应的液位传感器数据移除出序列h,对剩余的数据重新计算新的平均值及标准差(重复执行步骤1和2),直到所有数据满足
[0100]
③
得到被标记过的液位传感器集合λ(如λ=[1,3,5]表示第1,3,5号液位传感器数据可能异常);
[0101]
每一个采样时刻执行以上计算,若任一液位传感器连续m个时刻被标记,则产生液位传感器故障信号。
[0102]
另外,还包括异常检测处理情况,具体如下:
[0103]
①
若液位传感器故障检测算法中产生故障信号,控制线板5控制外部输出电路,使警示灯发出每5秒闪烁一次的故障信号;
[0104]
②
在异常状况下,如执行机构卡死或蓄电池点亮不足等,可能导致系统工作不正常。对此,若判定连续10个采样时间或成立,控制线板控制外部输出电路,使警示灯发出每1秒闪烁一次的故障信号;
[0105]
③
若连续10个采样时间控制线板5控制外部输出电路,使警示灯发出每3秒闪烁一次的故障信号。
[0106]
本发明采用的控制线板5中通过融合锚链2的竖直角度α和浮标本体1在水面上的沉浸高度h两个信息,控制驱动电机3-2进行收放绞盘3-1的动作,实现锚链2长度的实时调节。最基本的原理为:(1)如果锚链2数值角度α超过一定值,则收锚链2,直到α减小至设定范围;(2)设定浮标本体1自由漂浮时的目标液位高度为h0(液位传感器下沿距水面的距离),控制线板5的液位控制区间为[h0+a,h0+b]。自动状态下,经故障诊断及滤波后的液位高度小于h0+a时,收锚链2直至大于h0+(a+b)/2,液位高度大于h0+b时,受锚链2直至小于h0+(a+b)/2。其中,h0于投放时测定,a、b的值经实验确定其合理取值(b>a>0)。控制最终的效果呈现为浮标的锚链2基本保持竖直方向(浮标位于锚正上方),并且锚链2处于略收紧的状态,实现浮标本体1的自适应控制。
[0107]
尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1