一种新型大功率水下助推器控制系统的制作方法
1.本发明属于数字电子控制技术改进领域,尤其涉及一种新型大功率水下助推器控制系统。
背景技术:
2.现有的水下助推器主要着重于消费娱乐,救援等应用方面,而在海洋工程水下探测、姿态航向标定、避障控制测距、环境拍摄、海洋地貌合成、水下照明、射频遥控等应用领域处于空白阶段。
3.现有的水下助推器受限于产品的外观设计理念,尺寸受限下,电力续航时间较短、动力推进速度较慢、功能拓展上有限,很大程度上限制了产品的应用场景。
技术实现要素:
4.本发明的目的在于提供一种新型大功率水下助推器控制系统,旨在解决上述的技术问题。
5.本发明是这样实现的,一种新型大功率水下助推器控制系统,所述新型大功率水下助推器控制系统包括动力推进模块、中长距离遥控模块、中央处理器mcu、数据通信模块、航向导航模块、照明模块、避障模块、摄像模块及供电模块,所述动力推进模块,用于根据接收mcu指令或遥控指令控制每个电调产生驱动信号控制对应电机转速及航向的驱动力;所述中长距离遥控模块,用于利用调频和扩频通信技术接收遥控发送控制指令,使得水下助推器完成相对应的指令,或根据突发情况进行急救或返航;所述中央处理器mcu,用于根据接收的数据信息利用自动控制算法输出控制动力推进模块的指令、照明模块的指令、摄像模块的指令,控制数据通信模块对外数据输出;所述数据通信模块,用于水下与水上进行数据交换;所述航向导航模块,用于输出高精度的设备体坐标系下的x,y,z向三维速度或输出大地坐标系下的东向,北向,垂直向三维速度,输出高精度的笛卡尔坐标系下航向角度值横摇roll、俯仰pitch、偏航yaw,配合高精度磁传感器,得到实际的航向角;所述照明模块,用于为助推器水下航行,安全作业,高清拍摄提供照明;所述避障模块,用于用超声波发射出去后,经过水传播,遇到水下被测物体,再反射回来,通过算法计算及滤波,可知助推器设备到物体的精确距离并将数据传输给中央处理器mcu;所述摄像模块,用于摄像并具备光学图像自动拼接功能,将空间上相互联系的图像序列经过重采样,比对,融合后,形成一幅宽视角无缝高清全景图像,可重建水下地形地貌,以及周围环境;所述供电模块,用于给控制系统供电。
6.本发明的进一步技术方案是:所述动力推进模块包括大功率电机、电机驱动mos板及电调控制单元,所述电调控制单元的输出端连接所述电机驱动mos板的输入端,所述电机驱动mos板的输出端连接所述大功率电机的控制端,所述电调控制单元,用于接收来自中央处理器mcu的指令信号,经指令信号进行算法解析,将解析出的指令信号输出;所述电机驱动mos板,用于根据解析的指令信号调整设置控制电机的参数并驱动电机根据指令工作;所
述大功率电机,用于根据指令工作提供驱动力推动助推器动作。
7.本发明的进一步技术方案是:所述航向导航模块包括多普勒计程仪dvl及惯性测量单元imu,所述多普勒计程仪dvl,用于输出高精度的设备体坐标系下的x轴、y轴、和z轴三个方向的三维速度或输出大地坐标系下的东向、北向和垂直向三个方向的三维速度,提供水下对底高度,距离水面的入水深度,水下流体的水温数据,根据导航算法输出水下导航坐标值,并将水下坐标值导入大地坐标系完成水下运动轨迹的跟踪定位且显示在导航地图上;所述惯性测量单元imu,用于输出高精度的笛卡尔坐标系下航向角度值横摇roll、俯仰pitch、偏航yaw,配合高精度磁传感器获得实际航向角。
8.本发明的进一步技术方案是:所述中长距离遥控模块采用的是射频433m双向收发装置。
9.本发明的进一步技术方案是:所述照明模块包括两颗大功率的led照明灯,所述led照明灯的灯体内由3颗独立的4*4 leds矩阵构成。
10.本发明的进一步技术方案是:所述避障模块采用超声波传感探头。
11.本发明的进一步技术方案是:所述摄像模块采用12m超高清光学感应sensor搭配大广角镜头构成。
12.本发明的进一步技术方案是:所述数据通信模块为wifi单元和/或蓝牙单元,所述wifi单元,用于与连接终端,通过终端查看相关的视频图像,测试采集数据,通过通信网络上传云端服务器,更新设备系统固件及升级维护;所述蓝牙单元,用于与终端匹配,在终端读取相关的机器运行参数信息。
13.本发明的进一步技术方案是:所述中央处理器mcu采用的内嵌式stm32f407系列芯片。
14.本发明的进一步技术方案是:所述供电模块包括电池组及操作把手,所述操作把手上设有3个按键按钮;所述电池组为两个,所述操作把手为两个;6个所述按键按钮实现开机、启动、调速、拍照、录像及调光功能。
15.本发明的有益效果是:增加了姿态航向与惯性导航、声呐避障测距功能;集成了拍摄功能、照明补光、rf射频遥控、wifi/bt通信链接;提高了助推器的航速以及待机作业时间,拓展相关的应用场景。该控制系统结构简单、使用方便,操作简单,能够有效的实现助推器与岸上直接通信与控制。
附图说明
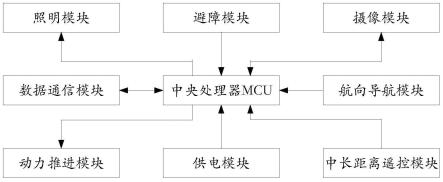
16.图1是本发明实施例提供的新型大功率水下助推器控制系统的结构框图。
具体实施方式
17.如图1所示,本发明提供的新型大功率水下助推器控制系统,所述新型大功率水下助推器控制系统包括动力推进模块、中长距离遥控模块、中央处理器mcu、数据通信模块、航向导航模块、照明模块、避障模块、摄像模块及供电模块,所述动力推进模块,用于根据接收mcu指令或遥控指令控制每个电调产生驱动信号控制对应电机转速及航向的驱动力;所述中长距离遥控模块,用于利用调频和扩频通信技术接收遥控发送控制指令,使得水下助推器完成相对应的指令,或根据突发情况进行急救或返航;所述中央处理器mcu,用于根据接
收的数据信息利用自动控制算法输出控制动力推进模块的指令、照明模块的指令、摄像模块的指令,控制数据通信模块对外数据输出;所述数据通信模块,用于水下与水上进行数据交换;所述航向导航模块,用于输出高精度的设备体坐标系下的x,y,z向三维速度或输出大地坐标系下的东向,北向,垂直向三维速度,输出高精度的笛卡尔坐标系下航向角度值横摇roll、俯仰pitch、偏航yaw,配合高精度磁传感器,得到实际的航向角;所述照明模块,用于为助推器水下航行,安全作业,高清拍摄提供照明;所述避障模块,用于用超声波发射出去后,经过水传播,遇到水下被测物体,再反射回来,通过算法计算及滤波,可知助推器设备到物体的精确距离并将数据传输给中央处理器mcu;所述摄像模块,用于摄像并具备光学图像自动拼接功能,将空间上相互联系的图像序列经过重采样,比对,融合后,形成一幅宽视角无缝高清全景图像,可重建水下地形地貌,以及周围环境;所述供电模块,用于给控制系统供电。增加了姿态航向与惯性导航、声呐避障测距功能;集成了拍摄功能、照明补光、rf射频遥控、wifi/bt通信链接;提高了助推器的航速以及待机作业时间,拓展相关的应用场景。
18.所述动力推进模块包括大功率电机、电机驱动mos板及电调控制单元,所述电调控制单元的输出端连接所述电机驱动mos板的输入端,所述电机驱动mos板的输出端连接所述大功率电机的控制端,所述电调控制单元,用于接收来自中央处理器mcu的指令信号,经指令信号进行算法解析,将解析出的指令信号输出;所述电机驱动mos板,用于根据解析的指令信号调整设置控制电机的参数并驱动电机根据指令工作;所述大功率电机,用于根据指令工作提供驱动力推动助推器动作。
19.动力推进模块即动力推进系统,是由大功率电机、电机驱动mos板及电调控制单元组成。电机功率36v1200w,转速2300rpm,25kgf推力输出,水下航速生成为4m/s(14.4km/h)。
20.所述航向导航模块包括多普勒计程仪dvl及惯性测量单元imu,所述多普勒计程仪dvl,用于输出高精度的设备体坐标系下的x轴、y轴、和z轴三个方向的三维速度或输出大地坐标系下的东向、北向和垂直向三个方向的三维速度,提供水下对底高度,距离水面的入水深度,水下流体的水温数据,根据导航算法输出水下导航坐标值,并将水下坐标值导入大地坐标系完成水下运动轨迹的跟踪定位且显示在导航地图上;所述惯性测量单元imu,用于输出高精度的笛卡尔坐标系下航向角度值横摇roll、俯仰pitch、偏航yaw,配合高精度磁传感器获得实际航向角。
21.所述航向导航模块即姿态航向参考与惯性导航系统由多普勒计程仪dvl以及惯性测量单元imu组成。dvl主要功能是输出高精度的设备体坐标系下的x,y,z向三维速度,以m/s为单位;也可以输出大地坐标系下的东向,北向,垂直向三维速度,以m/s为单位;提供水下对底高度,距离水面的入水深度,水下流体的水温数据;内嵌的导航算法,直接输出水下平台的相对导航坐标值,将坐标值引入大地坐标系,可以实现水下运动轨迹的跟踪定位并显示在导航地图上。imu单元主要功能是输出高精度的笛卡尔坐标系下航向角度值横摇roll、俯仰pitch、偏航yaw,配合高精度磁传感器,得到实际的航向角。将航向角接入电机pid控制模型,进行卡尔曼滤波和相关的控制运算后,可以精确的进行对电机的控制。
22.所述中长距离遥控模块采用的是射频433m双向收发装置。所述中长距离遥控模块即中长距射频遥控系统搭载新型的射频433m双向收发装置,利用调频和扩频通信技术,可实现6公里内的遥控距离。操作员站在岸上,通过遥控按键发送控制指令,水下助推器接收到指令,完成相关控制。也可以解决当水下操控员遇到突发危险,紧急情况时可进行急救,
返航。
23.所述照明模块包括两颗大功率的led照明灯,所述led照明灯的灯体内由3颗独立的4*4 leds矩阵构成。所述照明模块即照明补光系统由两颗大功率的led照明灯组成,每颗灯体内还有3颗独立的4*4 leds矩阵,提供15w,2000lum的光亮输出。整个照明系统可达到90w,12000lum的光通量输出。为助推器水下航行,安全作业,高清拍摄提供照明。
24.所述避障模块采用超声波传感探头。所述避障模块即声呐规划避障系统搭载了超声波传感器探头,利用超声波发射出去后,经过水传播,遇到水下被测物体,再反射回来,通过相关的算法计算以及滤波,便可知道助推器设备到物体的精确距离,mcu通过不断的测试实时的识别海底障碍,根据障碍物的复杂度与碰撞危险度规划避障路径,进入自主避障模式,当判断当前环境为低碰撞危险度和低复杂地形时,又可自主退出避障模式,返回光学摄像模式。
25.所述摄像模块采用12m超高清光学感应sensor搭配大广角镜头构成。所述摄像模块即光学摄像系统为12m超高清光学感应sensor搭配大广角镜头组成。可拍摄3840*2160 16:9 uhd jpeg图像照片,以及uhd3840*2160 30fps的视频。强大的isp参数调节功能,方便用户进行各种优化参数设置。摄像系统具备光学图像自动拼接功能,将空间上相互联系的图像序列经过重采样,比对,融合后,形成一幅宽视角无缝高清全景图像,可重建水下地形地貌,以及周围环境。
26.所述数据通信模块为wifi单元和/或蓝牙单元,所述wifi单元,用于与连接终端,通过终端查看相关的视频图像,测试采集数据,通过通信网络上传云端服务器,更新设备系统固件及升级维护;所述蓝牙单元,用于与终端匹配,在终端读取相关的机器运行参数信息。
27.所述数据通信模块即数据通信交互系统提供wifi和蓝牙通信功能。操作员水下返航后,可利用wifi连接手机热点,便可以在手机app上下载,查看相关的视频图像,测试采集数据,及时的通过通信网络上传云端服务器,或者更新设备的系统固件,及时升级维护。同时也可以通过蓝牙和手机蓝牙匹配,在app上读取相关的机器运行参数信息。
28.所述中央处理器mcu采用的内嵌式stm32f407系列芯片。中央处理器mcu接收用户按键把手操作指令或rf射频遥控指令输入,以及mcu自动控制算法输出到电调控制单元,由每个电调产生相应的驱动信号驱动电机mos板,进而驱动电机的转动。根据电机的控制pid算法控制电机转速,推力,航向等。
29.所述供电模块包括电池组及操作把手,所述操作把手上设有3个按键按钮;所述电池组为两个,所述操作把手为两个;6个所述按键按钮实现开机、启动、调速、拍照、录像及调光功能。
30.所述供电模块即大功率助推器搭配双电池组和左右操作把手。电池为36vdc/397wh/11000mah的锂电池,双电池接近800wh的功率,可持续输出50a的电流,峰值可达70a。整机的续航可在75min之上。两边各有一个操作把手,每个把手带3个按键,可实现开机,启动,调速,拍照,录像,调光功能。
31.该大功率水下助推器控制系统设计,在目前助推器的设计概念基础上,增加了姿态航向与惯性导航、声呐避障测距功能;集成了拍摄功能、照明补光、rf射频遥控、wifi/bt通信链接;提高了助推器的航速以及待机作业时间,拓展相关的应用场景。
32.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1