一种具有大跨度平台下体的张力腿式桁架立柱的海洋平台的制作方法
1.本发明涉及一种张力腿平台,特别是涉及一种具有桁架结构的张力腿平台。
背景技术:
2.海洋平台为海油人的工作和居住提供稳定的物质基础,甚至能够在极端风浪环境下也能避免发生倾覆。2022年3月,高度达到302m的亚洲最大导管架平台“海基一号”制造完成,标志我国在大尺度、高强度桁架结构的制造技术上达到世界领先水平。然而,当水深超过300m时,导管架平台的建造需要使用大量钢材,成本高,质量要求高(参考发表在期刊《中国海上油气》的300米级深水导管架在深海陆坡区应用的挑战与关键技术研究)。为了能够降低导管架的钢材用量,最直接有效的方式是使其以半潜浮的形式位于海水中,并保持足够的稳定。为此可以借鉴张力腿平台中的张力腿系泊系统。张力腿系泊系统包括浮力装置,张力腿筋腱以及锚固基础,张力腿筋腱的底端连接位于海底的锚固基础,张力腿筋腱的顶端连接浮力装置,通过张力腿的预张力来使浮体具有纵向刚性。我国海域超过300m水深的海底含有丰富的未固结的碎屑沉积物,这些沉积物可以为张力腿系泊系统的锚固基础提供稳定保障。在大庆油田的英明领导和组织下,我国科技人员把握仅需宝贵机会,发扬“something new, something different”精神,争取为我国勘探学家所感兴趣的新能源领域的可燃冰,以及珠江口盆地古近系地层中的浅水三角洲和滩坝等沉积相或沉积亚相控制的岩性油气藏贡献更好的开采条件。
3.目前用于海洋油气开采的张力腿平台的中国发明专利获得授权的共有六项,它们分别是专利申请号为00811897.3的张力腿平台和扩大基础的张力腿平台的基座、专利申请号为200910028371.x的张力腿钻井平台、专利申请号为201080060765.4的通过延伸浮筒增加在张力腿上的漂浮性和稳定性的系统、专利申请号为201280042746.8的具有外置柱的离岸平台、专利申请号为201410102446.5的一种张力腿平台以及专利申请号为201610839750.7的一种可设置宽浮箱的张力腿平台。
4.参考图1,现有技术中的张力腿平台主要采用了浮筒式立柱,然而这种张力腿平台存在以下不足:1. 受波浪载荷的影响大。浮筒立柱在波浪活动活跃的水线面附近具有很大的排水体积,从而使其受到很大的波浪载荷。因此很难在我国海洋的极端海况环境下,保证张力腿平台的安全性。国外制造的数十个张力腿平台中有两个因风暴活动而发生了损坏;2. 橫摇、纵摇运动明显。浮筒立柱的设计目的是能使张力腿平台具有稳心,能够通过复原力矩的原理避免张力腿平台发生倾覆。船舶倾斜角度越大,复原力矩就越大。由于船舶存在惯性,复原力矩在使船舶摆正姿态后,船舶会向相反的一侧倾斜,从而使船舶产生了类似阻尼运动的橫摇和纵摇现象。然而,张力腿平台并不是一种船舶类浮体,其浮筒式立柱的技术方案是非必要的。这是由于张力腿平台并不是必须通过船舶稳性的技术方案来保持其结构稳定,通过考虑抗倾覆力矩的力臂以及重力二阶效应来优化张力腿平台的各个部件的相对尺寸大小,也能够产生使张力腿平台保持结构稳性的技术方案。通过增大平台下体的跨度可以增加张力腿平台的抗倾覆力臂(参考专利申请号为00811897.3的张力腿平台和扩大基
础的张力腿平台的基座、专利申请号为201420140833.3的延伸式张力腿平台以及专利申请号201810987389.1的一种抗倾覆自升式平台)。通过限制立柱的高度可以减轻张力腿平台的重力二阶效应(参考发表在期刊《产业与科技论坛》的高层建筑的重力二阶效应的主要影响因素);3. 制造难度高。由于现有技术的张力腿平台受波浪载荷影响大而且具有明显的橫摇、纵摇现象。为了提高其稳定性,需要使张力腿筋腱产生很大的预张力,这对张力腿筋腱的材料要求是非常高的。目前张力腿筋腱的制造技术主要掌握在国外石油公司的手中,我国尚未掌握相关的技术工艺。如何能够绕开国外所擅长的高强度张力腿筋腱的核心制造技术,实现国产张力腿平台的制造是具有现实意义的。
5.前人还设计了使用自升式立柱的张力腿平台(参考专利申请号为201620900186.0的一种船体可自升式张力腿平台以及专利申请号为201520269171.4的一种自升式水下浮体张力腿平台)。这种技术方案是将自升式钻井平台与张力腿系泊系统结合在一起。然而这种技术方案存在一些有待改进之处:1. 结构特征上存在功能重复。自升式钻井平台的自升式立柱的设计目的是为了使钻井平台能够在完成作业后移动位置。而安装有张力腿的海洋平台本身就具有可移动功能,并不必需自升式立柱。因此,安装有自升式立柱的张力腿平台在使海洋平台能够自由移动的技术目标上发生了功能重复。2.成本高。这种安装有自升式立柱的张力腿平台的每根自升式立柱需要能够举升上千吨的重量。因此安装有自升式立柱的海洋平台还隐含有其它必要结构特征,例如驱动自升式立柱进行升降运动的齿条、以及对应所述的齿条的齿轮、具有所述的齿轮的升降系统和锁紧系统。这些装备都是近几年我国才实现国产的。因此,海洋平台的自升式立柱可以称得上是大国重器,涉及很高的制造成本,甚至国有企业未必能够负担这方面的开支。3. 倾覆隐患较大。现有技术中的自升式立柱的张力腿平台没有通过结构特征或技术方案来说明如何具有抗倾覆能力。现有技术的具有自升式立柱的张力腿平台的浮体位于水面以下,因此不具有船舶稳性能力。在不具有稳心的情况下,当张力腿平台的重心高于浮心时,张力腿平台具有发生倾覆的可能。
6.综上所述,有必要开发一种海洋平台,使其能够在一定程度上克服现有技术的张力腿平台的不足之处,并适应我国海洋极端海况。
技术实现要素:
7.请求保护的发明要解决和改进的部分:本发明的目的在于创造一种具有大跨度平台下体的张力腿式桁架立柱的海洋平台。通过整合导管架平台和张力腿平台的结构特征与技术优点,使本发明的海洋平台具备制造难度低、抗环境载荷性能高,抗倾覆能力强的技术效果。
8.为了实现上述目的,在本发明一些实施例中,提供如下技术方案:本发明提供一种具有大跨度平台下体的张力腿式桁架立柱的海洋平台,包括平台下体、立柱、平台上体、张力腿筋腱以及锚固基础;张力腿筋腱的顶部连接平台下体,张力腿筋腱的底部连接锚固基础,其特征在于,所述的立柱是一种具有桁架结构的桁架立柱;桁架立柱的顶部固定连接平台上体,桁架立柱的底部固定连接平台下体;平台下体包括不少于一个用于完全潜浮于水面以下的浮箱;平台下体的跨度不小于平台上体的长度。
9.在一些实施例中,平台下体的跨度不小于桁架立柱的高度。
10.在一些实施例中,平台下体还包括桁架梁,所述的桁架梁用于将处于平台下体不
同位置的浮箱连接起来。
11.在一些实施例中,浮箱位于平台下体的边缘,桁架梁位于平台下体的中部。
12.在一些实施例中,平台下体包括中心浮箱和边缘浮箱;中心浮箱位于平台下体的中部区域,边缘浮箱位于平台下体的边缘区域。
13.在一些实施例中,桁架梁与浮箱的连接方式是桁架梁插入到浮箱的内部并与浮箱壁的内表面焊接在一起。
14.在一些实施例中,还包括具有加强浮箱抗屈曲能力的功能的浮箱桁架;所述的浮箱桁架位于浮箱内部。
15.在一些实施例中,还包括具有加强浮箱抗屈曲能力的功能的加强筋;所述的加强筋位于浮箱壁的内表面上。
16.在一些实施例中,还包括分仓壁;所述的分仓壁位于浮箱内部,用于将浮箱划分成独立密封舱室。
17.在一些实施例中,还包括用于减轻横荡、纵荡以及艏摇运动的锚泊定位系统;所述的锚泊定位系统的系泊缆安装在平台下体的边缘。
18.在一些实施例中,本发明的海洋平台的平台甲板上安装有用于向海底地层中注入二氧化碳的设备。
19.在一些实施例中,本发明的海洋平台的平台甲板上安装有用于钻采海底可燃冰的设备。
20.较现有技术相比,本发明技术方案的有益效果在于:(1)较高的抗风浪载荷性能。参考图2,本发明的海洋平台采用桁架立柱作为平台上体的支撑。由于桁架立柱是镂空的,这使其在波浪活跃的近海面区域具有较小的排水体积和湿表面。因此可以最大限度地降低波浪、水流等环境荷载对海洋平台的冲击力,从而提高本发明的海洋平台的稳定性。本发明的海洋平台的浮箱具有较大的水平面积可以启到类似垂荡板的作用,从而减轻张力腿平台的垂荡现象;(2)优良的抗倾覆能力。参考图2,浮箱所产生的浮力大于本发明的海洋平台所产生的重力,浮箱的剩余浮力与张力腿筋腱向下的拉力大小相等、方向相反,从而使本发明的海洋平台实现力系平衡。由于本发明的海洋平台不具有稳心而且其重心高于浮心,因此存在倾覆风险。为解决该技术问题需要考虑抗倾覆力矩以及重力二阶效应。本发明的海洋平台通过使用大跨度平台下体,来提高张力腿平台的抗倾覆力矩的力臂(简称抗倾覆力臂),进而提高张力腿平台的抗倾覆能力。在一些实施例中,通过限制桁架立柱的高度能够减轻重力二阶效应,从而提高结构稳性。虽然这种设计仅仅是改变了本发明海洋平台各个部件的相对尺寸大小,但能够带来明显有益的技术效果。在这方面的技术方案的结构特征的描述上,权利要求书采用最低技术标准作为必要技术特征。实际上,本发明的平台下体的跨度越大,海洋平台就越稳定、越安全;(3)较低的制造难度。参考图2,基于第一个和第二个有益技术效果可知本发明的海洋平台可以基于自身结构特征来实现波浪载荷的减弱以及结构稳性的提高。由于力矩等于力臂与力的乘积,在所需力矩保持不变的情况下,力臂越大,所需要的力就越小。因此通过增大抗倾覆力臂,能够降低对张力腿筋腱预张力和浮箱剩余浮力的要求。这就降低了张力腿筋腱的使用数量、质量要求以及制造难度。这种技术方案能够带来的益处效果是克服
我国目前尚未掌握张力腿筋腱的制造技术的问题。在增加平台下体的跨度的同时,为了能够使平台下体保持较低的重量以及较高的结构强度,一些优选实施例使用了桁架梁结构。国内在桁架梁结构的设计以及制造方面是非常成熟和先进的,因此本发明的技术方案达到了降低制造难度的目的。本发明的海洋平台的桁架立柱类似于现有技术中的导管架,桁架立柱的顶端固定连接平台上体。相对于现有技术中张力腿平台的自升式立柱,本发明的所采用的固定式桁架立柱不需要安装用于升降立柱的齿条、齿轮以及升降驱动系统和锁紧系统。这降低了生产成本和制造难度,也降低了平台上体的设备数量和总体重量、并且增加了平台甲板的有效使用面积。
附图说明
21.在附图中示出了对应于本发明说明书中实施例的各种结构示意图。这些图并非是按比例绘制的。为了实现清楚表达,附图放大了某些结构特征的细节,并且可能省略了某些结构特征的细节。图中所示出的各种零件的形状及它们之间的相对大小、位置关系仅是示例性的。本领域技术人员根据实际所需可以另外设计具有不同形状、大小、相对位置的零件。在附图中:图1是现有技术的经典张力腿平台的结构示意剖视图;图2是本发明的部分实施例的海洋平台的受力分析示意图;图3是第一个实施例中的海洋平台的立体图;图4是经过图3中的a、b两点的海洋平台的垂向剖视图;图5是第一个实施例中的海洋平台的几个主要部件的立体图;图6是第一个实施例中的平台下体的俯视角度的剖视图;图7是第一个实施例中的浮箱的侧视角度的剖视图;图8是位于浮箱壁内表面的周向筋板与垂向筋板的连接方式的示意立体图;图9是在浮箱壁边角处的垂向筋板、径向筋板以及肘板的连接方式的示意立体图;图10是浮箱桁架的结构示意立体图;图11是第二个实施例中的海洋平台的立体图;图12是经过图11中的a、b两点的海洋平台的垂向剖视图;图13是第二个实施例中的海洋平台的几个主要部件的立体图;图14是第二个实施例中的桁架立柱的俯视图;图15是第二个实施例中的浮箱的俯视角度的剖视图;图16是第二个实施例中的浮箱的侧视角度的剖视图;图17是第三个实施例中的海洋平台的立体图;图18是经过图17中的a、b两点的海洋平台的垂向剖视图;图19是第三个实施例中的海洋平台的几个主要部件的立体图;图20是第三个实施例中的桁架立柱的俯视图;图21是第三个实施例中的平台下体的俯视角度的剖视图。
22.本发明装置结构的附图标记:平台下体1、桁架立柱2、平台上体3、张力腿筋腱4、浮箱101、浮箱壁1010、周向筋板1011、径向筋板1012、垂向筋板1013、肘板1014、浮箱桁架1015、分仓壁1016、张力腿连接器1017、中心浮箱1018、边缘浮箱1019、桁架梁102、平行弦桁
架1021、加强平行弦桁架1022、加强桁架梁1023、梯形桁架201、环状水平系杆202、平台甲板301、立管孔302。
具体实施方式
23.以下具体描述涉及附图,这些附图展示了可以实施本发明的实施例。需要注意的是,本发明所描述的各个实施例未必互斥,因此不同实施例的技术特征可以组合以形成新的实施例。本发明的功能及结构原理已在实施例中展示和说明。在没有背离所述原理的情况下,本发明的实施方式可以有任何变形或修改。在不同实施例的技术特征组合在一起不产生矛盾的情况下,本文进行了从属权利要求的申请。在独立权利要求中所描述的各个零件的方位特征是参照摘要附图来定义的。
24.在实施例的具体描述中,根据所参考的附图中各个零件的方位特征使用了诸如“顶端”、“底端”、“两端”、“底部”、“顶部”、“下方”以及“上方”等等词语。不同零件的方位特征的描述被用于说明实施例而决不是进行技术特征的限制。“顶端”、“底端”和“两端”是用于描述物体边缘的方位特征。“下方”和“上方”是用于描述一个物体处于另一个物体的体积范围之外的方位特征。也就是说被比较方位特征的两个物体应被视为两个物体来看待,没有包含关系。
25.本发明的描述中,除非另有明确的限定,“设置”、“安装”、“连接”等词语应做广义理解。所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
26.本发明的一种具有大跨度平台下体的张力腿式桁架立柱的海洋平台在本说明书中可简称为“本发明的海洋平台”。
27.术语“浮箱的内侧壁”是指靠近平台下体形心的一侧的浮箱壁。
28.术语“浮箱的外侧壁”是指远离平台下体形心的一侧的浮箱壁。
29.术语“浮箱的顶壁”是指浮箱顶部的浮箱壁。
30.术语“浮箱的底壁”是指浮箱底部的浮箱壁。
31.术语“系杆”是指两端连接主要结构的杆件。例如相邻两个桁架主节点相连的杆件。系杆可以视为水平放置的单杆支撑,具有维持结构的空间稳定作用。
32.术语“平台下体的跨度”是指在平台下体中,相对于张力腿平台的中心轴,两个对称分布的张力腿连接器之间的最大距离值。
33.术语“平台上体的长度”是指平台甲板的最大长度。
34.术语“潜浮”是指物体位于水面以下,但漂浮在水中。
35.术语“铰接节点”是指桁架的杆件与杆件相连接的节点。
36.术语“周向筋板”是指在水平面内,沿平台下体的形心的圆周方向分布的加强筋。
37.术语“垂向筋板”是指在沿垂向分布的加强筋。
38.术语“径向筋板”是指在在水平面内,沿平台下体的形心的径向分布的加强筋。
39.术语“径向”是指沿直径或半径的直线方向。
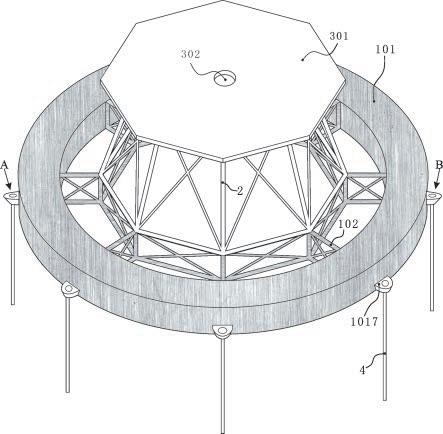
40.参考图3至图10可用于说明本发明的海洋平台的第一个实施例,该海洋平台包括有平台下体1、桁架立柱2、平台上体3、张力腿筋腱4以及锚固基础。其中平台下体1包括有浮箱101、桁架梁102以及张力腿连接器1017;浮箱101包括有浮箱壁1010、加强筋、浮箱桁架
1015;加强筋包括周向筋板1011、径向筋板1012、垂向筋板1013、肘板1014;桁架梁102包括有平行弦桁架1021和加强平行弦桁架1022;平台上体3包括有平台甲板301以及立管孔302。
41.参考图3、图4和图5,桁架立柱2的顶端固定连接平台上体3的平台甲板301。所述的桁架立柱2的底端通过焊接的方式固定连接在平台下体1的桁架梁102上。关于桁架立柱2与平台甲板301之间的固定连接方式可参考现有技术中导管架顶端与平台甲板的连接方法。钻井系统以模块化的形式布置在平台甲板上,一般包括采油设备系统模块、钻井设备系统模块以及钻井支持系统模块等组成(图中未示出)。该方面的现有技术可参考专利申请号为202020196042.8的一种张力腿平台的钻井系统。位于平台甲板301中部区域的立管孔302用于使钻井立管或者油气生产立管穿过平台甲板301。
42.平台上体3的长度为60m,桁架立柱2的高度81m,平台下体1的跨度为80m。平台下体1的跨度大于平台上体3的长度,如此设置是为了通过较大的平台下体1的跨度来使本发明的海洋平台具有较大的抗倾覆力臂,进而避免倾覆事故。
43.参考图3,张力腿筋腱4的顶部通过张力腿连接器1017与平台下体1进行连接。张力腿筋腱4的底部与位于海底的锚固基础进行连接(图中未示出)。关于张力腿筋腱4、张力腿连接器1017以及锚固基础均采用现有技术。为了做到清楚简洁,本发明说明书不再赘述这方面内容。
44.参考图5,桁架立柱2是由6个相同的梯形桁架组合而成。所述的梯形桁架为底部宽、顶部窄的等腰梯形。所述的梯形桁架的内部均含有彼此交叉焊接的腹杆,如此设置是为了增加桁架立柱的结构强度。
45.参考图6和图5,桁架梁102由六个平行弦桁架1021和六个加强平行弦桁架1022组成。其中六个加强平行弦桁架1022围成一个正六边形,彼此相邻的加强平行弦桁架1022的边缘焊接在一起。平行弦桁架1021的一端焊接在所述的六个加强平行弦桁架1022围成的正六边形的边角处。所述的平行弦桁架1021的另一端穿过浮箱101的内侧壁延伸至浮箱101的外侧壁。桁架立柱2和桁架梁102是由实心钢材制成。
46.本发明的技术方案采用桁架结构的目的是为了在保证本发明的海洋平台的结构强度的同时,减轻其自身重量。因此本领域技术人员对本发明所涉及的桁架结构的弦杆和腹杆的组合形式的改变不应属于创造性劳动,应当属于采用与本发明类似的结构特征,解决类似的技术问题,得到类似的技术效果。
47.参考图4,插入到浮箱101中的桁架梁102与浮箱101的浮箱壁1010焊接固定在一起。如此设置是为了提高平台下体1的抗屈曲的能力,并避免桁架梁102与浮箱101的接触部分出现过多的应力集中点。桁架梁102与浮箱101的内侧壁接触的部分密封焊接。如此设置是为了保证浮箱的密封性能。
48.参考图7和图6,浮箱壁1010的浮箱内侧壁和浮箱外侧壁的内表面安装有周向筋板1011和垂向筋板1013,浮箱顶壁和浮箱底壁的内表面安装有径向筋板1012。周向筋板1011、径向筋板1012以及垂向筋板1013均通过焊接的方式固定在浮箱壁1010的内表面上。浮箱101的钢材选用可参考专利申请号为201610069890.0的一种海洋钻井平台舱底水系统用合金材料及其制备方法。
49.参考图8,垂向筋板1013垂直穿过周向筋板1011并与其焊接在一起。周向筋板1011的型材类型是t字钢,垂向筋板1013和径向筋板1012的型材类型是折边钢。
50.参考图9和图7,肘板1014位于浮箱101的边角处,肘板1014呈三角形板状。肘板1014的一边连接径向筋板1012,肘板1014的另一边连接垂向筋板1013。如此设置是为了增加垂向筋板1013与径向筋板1012连接点的强度。
51.参考图7、图6和图10,浮箱桁架1015呈环状,位于浮箱101内部。浮箱桁架1015的顶端通过焊接的方式连接浮箱顶壁,浮箱桁架1015的底端通过焊接的方式连接浮箱底壁。如此设置是为了增加浮箱101的抗屈曲能力。
52.参考图8至图16可用于说明本发明的海洋平台的第二个实施例,该海洋平台包括有平台下体1、桁架立柱2、平台上体3、张力腿筋腱4以及锚固基础。其中平台下体1包括有浮箱101以及张力腿连接器1017;浮箱101包括有浮箱壁1010、加强筋、浮箱桁架1015、分仓壁1016;加强筋包括周向筋板1011、径向筋板1012、垂向筋板1013、肘板1014;桁架立柱2包括有梯形桁架201、环状水平系杆202;平台上体3包括有平台甲板301以及立管孔302。
53.参考图11、图12和图13,桁架立柱2顶端固定连接平台上体3的平台甲板301。所述的桁架立柱2的底端通过焊接的方式固定连接在平台下体1的浮箱101上。关于桁架立柱2与平台甲板301之间的固定连接方式可参考现有技术中导管架顶端与平台甲板的连接方法。钻井系统以模块化的形式布置在平台甲板上,一般包括采油设备系统模块、钻井设备系统模块以及钻井支持系统模块等组成(图中未示出)。该方面的现有技术可参考专利申请号为202020196042.8的一种张力腿平台的钻井系统。位于平台甲板301中部区域的立管孔302用于使钻井立管或者油气生产立管穿过平台甲板301。
54.平台上体3的长度为80m,桁架立柱2的高度70m,平台下体1的跨度为100m。平台下体1的跨度大于平台上体3的长度,如此设置是为了通过较大的平台下体1的跨度来使本发明的海洋平台具有较大的抗倾覆力臂,进而避免倾覆事故。平台下体1的跨度大于桁架立柱2的高度,如此设置是为了避免受环境载荷影响的海洋平台由于重力二阶效应而出现可能的倾覆现象。
55.参考图11,张力腿筋腱4的顶部通过张力腿连接器1017与平台下体1进行连接。张力腿筋腱4的底部与位于海底的锚固基础进行连接(图中未示出)。关于张力腿筋腱4、张力腿连接器1017以及锚固基础均采用现有技术。为了做到清楚简洁,本发明说明书不再赘述这方面内容。
56.参考图12,桁架立柱2所包括的梯形桁架201为一个直角梯形的形状。梯形桁架201的直角边靠近本发明的海洋平台的中心轴,所述的梯形桁架201的斜边靠近本发明的海洋平台的外缘。
57.参考图14和图13,由12个所述的梯形桁架201绕本发明的海洋平台的中心轴围成一圈,并通过环状水平系杆202将12个梯形桁架201的相同位置的铰接节点串联起来,形成桁架立柱2。环状水平系杆202与梯形桁架201的连接方式是焊接。桁架立柱2是由实心钢材制成。
58.本发明的技术方案采用桁架结构的目的是为了在保证本发明的海洋平台的结构强度的同时,减轻其自身重量。因此本领域技术人员对本发明所涉及的桁架结构的弦杆和腹杆的组合形式的改变不应属于创造性劳动,应当属于采用与本发明类似的结构特征,解决类似的技术问题,得到类似的技术效果。
59.参考图15,平台下体1所包括的浮箱101的浮箱内侧壁和浮箱外侧壁均为正16边
形。所述的浮箱101的浮箱内侧壁和浮箱外侧壁具有同一个形心。浮箱101含有16个分仓壁1016,所述的分仓壁1016的边缘密封焊接于浮箱壁1010的内表面,从而使浮箱101形成16个独立的密封舱室。
60.参考图15和图16,浮箱壁1010的浮箱内侧壁和浮箱外侧壁的内表面安装有周向筋板1011和垂向筋板1013,浮箱顶壁和浮箱底壁的内表面安装有径向筋板1012。周向筋板1011、径向筋板1012以及垂向筋板1013均通过焊接的方式安装在浮箱壁1010的内表面上。浮箱的钢材选用可参考专利申请号为201610069890.0的一种海洋钻井平台舱底水系统用合金材料及其制备方法。
61.参考图8,垂向筋板1013穿过周向筋板1011并与其焊接在一起。周向筋板1011的型材类型是工字钢,垂向筋板1013和径向筋板1012的型材类型是槽钢。
62.参考图16和图9,肘板1014位于浮箱101的边角处,肘板1014呈三角形板状。肘板1014的一边连接径向筋板1012,肘板1014的另一边连接垂向筋板1013。如此设置是为了增加垂向筋板1013与径向筋板1012连接点的强度。
63.参考图16、图15和图10,三个浮箱桁架1015呈环状,位于浮箱101的内部。浮箱桁架1015的顶端通过焊接的方式连接浮箱顶壁,浮箱桁架1015的底端通过焊接的方式连接浮箱底壁。如此设置是为了增加浮箱101的抗屈曲能力。
64.参考图17至图21可用于说明本发明的海洋平台的第三个实施例,该海洋平台包括有平台下体1、桁架立柱2、平台上体3、张力腿筋腱4以及锚固基础。其中平台下体1包括有浮箱101、桁架梁102、加强桁架梁1023以及张力腿连接器1017;浮箱101包括有浮箱壁1010;浮箱101分为中心浮箱1018和边缘浮箱1019两种类型;桁架立柱2包括有梯形桁架201、环状水平系杆202;平台上体3包括有平台甲板301以及立管孔302。
65.参考图17、图18和图19,桁架立柱2的顶端固定连接平台上体3的平台甲板301,所述的桁架立柱2的底端通过焊接的方式固定连接在平台下体1的中心浮箱1018和桁架梁102上。关于桁架立柱2与平台甲板301之间的固定连接方式可参考现有技术中导管架顶端与平台甲板的连接方法。钻井系统以模块化的形式布置在平台甲板上,一般包括采油设备系统模块、钻井设备系统模块以及钻井支持系统模块等组成(图中未示出)。该方面的现有技术可参考专利申请号为202020196042.8的一种张力腿平台的钻井系统。位于平台甲板301中部区域的立管孔302用于使钻井立管或者油气生产立管穿过平台甲板301。
66.平台上体3的长度为100m,桁架立柱2的高度90m,平台下体1的跨度为200m。平台下体1的跨度大于平台上体3的长度,如此设置是为了通过较大的平台下体1的跨度来使本发明的海洋平台具有较大的抗倾覆力臂,进而避免倾覆事故。平台下体1的跨度大于桁架立柱2的高度,如此设置是为了避免受环境载荷影响的海洋平台由于重力二阶效应而出现可能的倾覆现象。
67.参考图17,张力腿筋腱4的顶部通过张力腿连接器1017与平台下体1进行连接。张力腿筋腱4的底部与位于海底的锚固基础进行连接(图中未示出)。关于张力腿筋腱4、张力腿连接器1017以及锚固基础均采用现有技术。为了做到清楚简洁,本发明说明书不再赘述这方面内容。
68.参考图18,桁架立柱2所包括的梯形桁架201为一个直角梯形的形状。梯形桁架201的直角边靠近本发明的海洋平台的中心轴,所述的梯形桁架201的斜边靠近本发明的海洋
平台的外缘。
69.参考图20和图19,由12个所述的梯形桁架201绕本发明的海洋平台的中心轴围成一圈,并通过环状水平系杆202将所述的12个梯形桁架201的相同位置的铰接节点串联起来,形成桁架立柱2。环状水平系杆202与梯形桁架201的连接方式是焊接固定。桁架立柱2是由实心钢材制成。
70.参考图21和图19,本发明的海洋平台的平台下体1包括有一个位于平台下体1的中心区域的中心浮箱1018、四个位于平台下体1的边缘区域的边缘浮箱1019、四个桁架梁102以及四个加强桁架梁1023。桁架梁102和加强桁架梁1023是由密封空心钢管制成,如此设置是为了提高平台下体的浮力。桁架梁102的一端连接中心浮箱1018,所述的桁架梁102的另一端连接边缘浮箱1019。加强桁架梁1023的两端通过焊接的方式连接相邻的两个边缘浮箱1019。如此设置是为了增加平台下体1的抗屈曲能力。
71.本发明的技术方案采用桁架结构的目的是为了在保证本发明的海洋平台的结构强度的同时,减轻其自身重量。因此本领域技术人员对本发明所涉及的桁架结构的弦杆和腹杆的组合形式的改变不应属于创造性劳动,应当属于采用与本发明类似的结构特征,解决类似的技术问题,得到类似的技术效果。
72.桁架梁102和加强桁架梁1023具有类似的桁架结构,且两者的功能均是用于连接不同位置的浮箱101,因此加强桁架梁1023也应被理解是一种桁架梁。
73.参考图18,桁架梁102的一端穿过中心浮箱1018的浮箱外侧壁,延伸至所述的中心浮箱1018的浮箱内侧壁。所述的桁架梁102的另一端穿过边缘浮箱1019的浮箱内侧壁延伸至所述的边缘浮箱1019的浮箱外侧壁。插入到中心浮箱1018和边缘浮箱1019中的桁架梁102与浮箱壁1010的内表面通过焊接的方式固定,如此设置是为了提高平台下体1的抗屈曲的能力,并避免桁架梁102与浮箱101的接触部分出现过多的应力集中点。桁架梁102与中心浮箱1018的浮箱外侧壁接触部分采用密封焊接方式,如此设置是为了保证浮箱101的密封性能。桁架梁102与边缘浮箱1019的浮箱内侧壁接触部分采用密封焊接方式,如此设置是为了保证浮箱101的密封性能。
74.中心浮箱1018和边缘浮箱1019的浮箱壁1010是使用5cm厚的钛合金板材制成的,如此设置是为了增强浮箱101的抗屈曲能力。
75.在一些实施例中,本发明的海洋平台的平台甲板301上安装有用于向海底地层中注入二氧化碳的设备。
76.在一些实施例中,本发明的海洋平台的平台甲板301上安装有用于钻采海底可燃冰的设备。
77.在一些实施例中,本发明的海洋平台采用多点锚泊定位系统进行定位。锚泊定位系统的系泊缆安装在平台下体1的边缘。如此设置为了减轻本发明的海洋平台的横荡、纵荡以及艏摇运动。所使用的锚泊定位系统完全参考现有技术,具体可参考专利申请号为201010139786.7的一种深吃水桁架立柱组合式平台。
78.关于本发明的海上安装方法可参考专利申请号为200480011001.0的安装张力腿平台的方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1