一种基于压电纤维复合材料的柔性变形机翼控制系统的制作方法
1.本发明属于柔性变形机翼领域,涉及一种基于压电纤维复合材料的柔性变形机翼控制系统。
背景技术:
2.在航空领域中,机翼对于飞行器有着至关重要的作用。传统的飞行器设计中,常常通过改变固定刚性机翼的襟翼、副翼改善飞行器的综合性能。然而,此类机翼已逐渐不能满足严苛的飞行环境,错综复杂的飞行载荷以及随机变化的飞行任务。柔性变形机翼能够连续、大尺度、多自由度、高速率地主动变形,并实时感知飞行载荷和气动外形变化,在克服传统机翼不足,提升飞行器性能等方面具有十分重要的作用。因此,柔性变形机翼已经成为未来飞行器的主要发展方向。
3.压电纤维复合材料是先进的薄片型执行器和传感器,具有灵活,耐用,可靠高等优势,既能够在毫秒时间范围内提供105n/m2的作用力,又能够快速、准确地测量柔性机翼中的不规则时空振动过程。因此,将先进的压电技术与柔性变形机翼相结合,既能迅速改变机翼形状,又能精确获取变形过程中的感知数据,有利于飞行器获得最优的气动外形,从而大幅度提升飞行性能。
技术实现要素:
4.有鉴于此,本发明的目的在于提高飞行器的综合性能,提供一种基于压电纤维复合材料的柔性变形机翼控制系统。通过此系统既对柔性机翼进行变形控制,又能在机翼产生变形的情况下实现抑制机翼时空耦合的振动,可有效提升飞行器的飞行效率,提高飞行器适应复杂飞行环境的能力,使机翼更快速地达到最优的气动性能,并且更好地完成飞行任务。
5.为达到上述目的,本发明提供如下技术方案:
6.一种基于压电纤维复合材料的柔性变形机翼控制系统,飞机的机翼包括可变形部分和固定部分,在可变形部分的机翼蒙皮的外侧分布有多个压电驱动器,在可变形部分和固定部分的机翼蒙皮的内侧均分布有多个压电感知器;所述压电驱动器为用于驱动机翼可变形部分进行变形和振动抑制的压电纤维复合材料,所述压电感知器为用于感知时空振动的压电纤维复合材料;所述机翼内部通过固定横杆固定有多个激光位移传感器,用于测量多个局部区域内机翼可变形部分的变形情况;
7.还包括总控中心、数据采集卡、微型控制器、多元异构数据处理单元、通信传输单元、微型信号发生器、电荷采集器;
8.所述压电感知器与电荷采集器、数据采集卡、通信传输单元、多源异构数据处理单元、总控中心依次连接,所述激光位移传感器也与数据采集卡连接;所述压电感知器感知机翼的振动频率从而产生电荷,通过电荷采集器采集电荷量并与激光位移传感器采集到的机翼变形数据同时汇集到数据采集卡中进行预处理,再通过通信传输单元,经多源异构数据
处理单元连接到总控中心;所述电荷采集器还与微型控制器连接,用于在线监测在不同位置机翼的振动频率;
9.所述压电驱动器与微型信号发生器、微型控制器、通信传输单元、总控中心依次连接,所述总控中心接收到压电感知器和激光位移传感器传输的机翼变形数据后,对数据进行处理分析,从而动态控制机翼的可变形部分进行变形;总控中心通过将动态控制权交由微型控制器,控制微型信号发生器动态动作,从而驱动压电驱动器,带动可变形部分机翼变形和振动抑制。
10.进一步,所述微型信号发生器,产生多路低压直流或非对称交流信号,经过电压放大器,产生-500v到+1500v的直流或非对称交流电压,从而驱动多个局部区域的压电驱动器,促使该局部区域的可变形部分机翼变形。
11.进一步,所述微型控制器设置在机翼的固定部分,与总控中心通过通信传输单元连接,实时动态改变机翼变形。
12.进一步,所述的微型控制器收集到振动频率,经过总控中心的动态调配,微型控制器的期望使振动频率在最短时间内趋于零,利用数据驱动的方法,通过比对局部空间区域内的振动感知与期望信息,动态调整微型控制器生成的控制增益,驱动部分压电纤维复合材料进行振动抑制。
13.进一步,压电感知器采集的感知数据通过多源异构数据处理单元发送数据到总控中心,利用已知的先验信息,包括机翼蒙皮的外形、物理特性以及时空耦合属性,构建相对精确的机理模型,再利用数值计算方法将蒙皮的空间域进行离散化,便于融合多源感知信息与先验知识。
14.进一步,在总控中心,利用空间已离散的机理模型构建与实际系统匹配的输出观测器,将相同的驱动信号同时作用于实际的柔性机翼和输出观测器,并将观测器的输出与感知信息进行比较,利用时空误差信息进一步训练输出观测器,使得观测器的精度进一步逼近于实际的柔性机翼。
15.进一步,利用输出观测器估计与压电驱动器相同位置的感知信息,并将估计的时空感知信息与期望的时空动态信息进行比较,利用已获取的误差信息为基础,考虑柔性机翼的时空协同特性,进行更高级的控制与决策,获取不同位置的增益,并对微型控制器下发控制指令,依次对机翼可变形部分上的压电驱动器进行驱动。
16.进一步,通过总控中心综合决策机翼形变过程中的振动问题,将振动程度运用专家经验划分为不同的档次,由总控中心判定是否需要微型控制器单独抑制局部区域的振动;若面向于大幅度的形变和整体振动抑制,则需要经过总控中心对所有的微型控制器和压电驱动器进行协同,以实现机翼快速、平稳地变形。
17.本发明的有益效果在于:本发明既对柔性机翼进行变形控制,又能在机翼产生变形的情况下抑制机翼的时空耦合振动,可有效提升飞行器的飞行效率,提高飞行器适应复杂飞行环境的能力,使机翼更快速地达到最优的气动性能,并且更好地完成飞行任务。
18.本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和获得。
附图说明
19.为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
20.图1为柔性变形机翼剖面结构图;
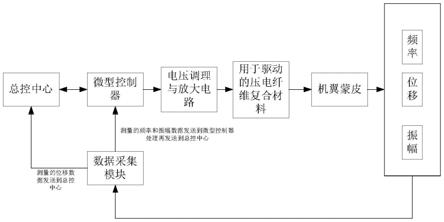
21.图2为柔性机翼变形控制系统的简略流程图;
22.图3为柔性机翼变形控制系统的详细流程图;
23.图4为总控中心柔性机翼综合控制算法设计的简要流程图。
24.附图标记:1-机翼,2-用于驱动的压电纤维复合材料,3-用于感知的压电纤维复合材料,4-激光位移传感器,5-固定横杆,6-蒙皮。
具体实施方式
25.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
26.其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
27.本发明实施例的附图中相同或相似的标号对应相同或相似的部件;在本发明的描述中,需要理解的是,若有术语“上”、“下”、“左”、“右”、“前”、“后”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此附图中描述位置关系的用语仅用于示例性说明,不能理解为对本发明的限制,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语的具体含义。
28.请参阅图1~图4,一种基于压电纤维复合材料的柔性机翼变形控制系统,分为第一控制单元和第二控制单元。第一控制单元包括微型控制器和通信传输单元,第二控制单元包括总控中心和多源异构数据处理单元。飞机的机翼分为可变形部分和固定部分,机翼蒙皮的外侧贴满了用于驱动机翼变形和振动抑制的压电纤维复合材料,主要用于实现机翼柔顺、平滑地变形,压电纤维复合材料由总控中心动态调控,综合调配不同区域内用于变形和振动的压电纤维复合材料,并将区域的动态控制权交由微型控制器进行调控;机翼蒙皮的内侧贴有用于感知时空振动的压电纤维复合材料,并通过数据采集卡收集振动产生的电荷量。机翼内部穿插有固定横杆,用于固定多个激光位移传感器,以测量多个局部区域内柔性机翼的变形情况。再将多源异构数据进行预处理并发送到总控中心。
29.在机身里有微型信号发生器,产生多路低压直流或非对称交流信号,经过电压放大器,产生-500v到+1500v的直流或非对称交流电压,驱动多个局部区域的压电纤维复合材料动作。驱动机翼蒙皮外侧的压电纤维复合材料促使机翼产生形变。
30.所述的柔性变形机翼的横杆上装有多个激光位移传感器,用于测量多个局部区域蒙皮的形变。同时用于感知蒙皮振动的压电纤维复合材料与电荷采集器连接,测量柔性机翼在变形过程中产生的振动,同时机翼内部安装有数据采集卡,用于汇聚、预处理多源异构感知信息。
31.所述的感知信息通过通信传输单元,经多源异构数据处理单元连接到总控中心。
32.所述的机翼固定部分内部装有微型控制器,固定部分机翼内外表面装有用于感知的压电纤维复合材料。
33.用于感知的压电纤维复合材料可检测机翼在不同飞行环境和不同变形程度下的振动频率。
34.所述的用于感知的压电纤维复合材料通过电荷采集器与微型控制器相连,在线监测在不同位置机翼的振动频率。
35.所述的微型控制器收集到振动频率,经过总控中心的动态调配,控制器的期望是振动频率在最短时间内趋于零,利用数据驱动的方法,通过比对局部空间区域内的振动感知与期望信息,动态调整微型控制器生成的控制增益,驱动部分压电纤维复合材料进行振动抑制。
36.系统中的感知数据通过多源异构数据处理单元发送数据到总控中心。利用已知的先验信息,如机翼蒙皮的外形、物理特性以及时空耦合属性等先验知识,构建相对精确的机理模型,再利用数值计算方法将蒙皮的空间域进行离散化,便于融合多源感知信息与先验知识。
37.利用空间已离散的机理模型构建与实际系统匹配的输出观测器。将相同的驱动信号同时作用于实际的柔性机翼和输出观测器,并将观测器的输出与感知信息进行比较,利用时空误差信息进一步训练输出观测器,使得观测器的精度进一步逼近于实际的柔性机翼。
38.利用输出观测器估计与用于执行的压电纤维复合材料相同位置的感知信息,并将估计的时空感知信息与期望的时空动态信息进行比较,利用已获取的误差信息为基础,考虑柔性机翼的时空协同特性,进行更高级的控制与决策,获取不同位置的增益,并对微型控制器下发控制指令,依次对变形机翼上的压电纤维复合材料进行驱动。
39.当总控中心发出指令控制机翼可变形部分中某一个区域需要变形时,该区域的压电纤维复合材料动作。电荷采集器和激光位移传感器将采集数据发送到数据采集卡,通过通信系统反馈到总控中心,总控中心利用上述的决策控制方法发出指令,驱动变形机翼的其余区域的电压纤维复合材料进行振动抑制。
40.当需要机翼可变形部分产生整体形变时,总控中心发出指令驱动机翼变形,上述的各类传感器采集变形数据反馈到驾驶舱上的总控中心。将检测到的振幅、频率以及位移等感知信息发送到微型控制器,微型控制器再通过通信传输单元,反馈数据发送到异构数据处理中心,汇集到总控中心进行控制、优化与决策。压电纤维复合材料往往会受到总控中心的直接控制驱动机翼可变形部分进行变形。若需要进行振动抑制时,只需微型控制器对这部分用于振动抑制的压电纤维复合材料进行动态调节,以实现在变形过程中振动抑制。
41.通过总控中心综合决策机翼形变过程中的振动问题,将振动程度运用专家经验划分为不同的档次,由总控中心判定是否需要微型控制器单独抑制局部区域的振动。若面向
于大幅度的形变和整体振动抑制,则需要问过总控中心对所有的微型控制器和压电纤维复合材料进行协同,以实现机翼快速、平衡地变形。
42.实施例一:
43.本发明是一种基于压电纤维复合材料的柔性机翼变形控制系统,机翼1上分为固定部分和柔性变形部分,柔性变形部分上贴有用于驱动的压电纤维复合材料。当总控中心发送指令控制机翼1变形时,用于驱动的压电纤维复合材料产生动作,使机翼1产生变形,获得更好的飞行性能,能适应复杂的飞行环境。数据采集卡采集到用于感知的压电纤维复合材料3和激光位移传感器4的数据发送到微型控制器,再通过通信传输单元发送到驾驶舱的总控中心中,总控中心可以通过异构数据处理单元实时检测变形机翼1。利用观测器将系统各个部分的运行情况反馈到总控中心,总控中心接收频率、振幅和位移等感知信息进行协同控制。同时,产生变形的同时会产生振动,总控中心判断机翼1的变形部分,如果是机翼的变形部分某一个区域,则发出指令控制变形部分其余区域的压电纤维复合材料进行抑制振动。如果机翼整体变形,则由微控制器和总控中心协同工作抑制振动。
44.在本实例中,所述第一处理单元采用微型控制器,所述第二处理单元是飞机驾驶舱内的总控中心。通过检测机翼1的变形部分,判断采用何种方式抑制振动。
45.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1