一种随动舵面驱动拉杆的交点确定方法与流程
1.本发明属于飞机结构设计领域,具体涉及一种用于双铰链舵面的随动舵面驱动装置交点位置确定方法。
背景技术:
2.目前多个型号方向舵中均采用了双铰链舵面的结构形式,后舵偏转角度与前舵偏转角度有一定关系,一般后舵为前舵两倍关系。在后舵偏转角度控制中目前是通过拉杆位置的画图协调试凑法来确定后舵拉杆的具体安装坐标,此方法效率较低,且不能精准的实现后舵偏转角度,与设计值存在一定误差。
技术实现要素:
3.为了解决上述问题,本技术提供了一种随动舵面驱动拉杆的交点确定方法,所述随动舵面包括前舵,绕前舵摆动的后舵;
4.前舵铰接第一杆,第一杆铰接第二杆,第二杆铰接第三杆,第三杆铰接第四杆,第三杆为后舵的一部分,第一杆、第二杆、第三杆和第四杆构成平面四杆机构;
5.确定随动舵面驱动拉杆的交点确定方法,其特征在于,包括以下步骤:
6.步骤s1:令垂直第一杆的方向为w方向,垂直于所述w方向的为z方向,以平面四杆机构z和w方向的矢量长度和作为直角三角形的两条直角边,第一杆为斜边构建一个直角三角形;
7.步骤s2:根据所述直角三角形的三边关系构建四条杆的长度、第三杆与w方向或z方向的夹角、第四杆与w方向或z方向的夹角的四杆两角的关系等式。
8.步骤s3:赋予第三杆与w方向或z方向的夹角或者第四杆与w方向或z方向的夹角多个值,代入步骤2所述四杆两角的关系等式,构建四杆一角的关系等式;
9.步骤s4:由预设的所述第三杆与w方向或z方向的夹角对应所述第四杆与w方向或z方向的夹角的比值,建立四杆的关系式,通过已知杆长求解未知杆长,并确定杆长交点位置。
10.优选的是,步骤s2中所述的四杆两角的关系式包括第三杆处于第四杆两个不同侧面时的两个关系式。
11.优选的是,步骤s2所述直角三角形的三边关系为勾股定理。
12.优选的是,步骤s3中的赋予第三杆与w方向或z方向的夹角或者第四杆与w方向或z方向的夹角多个值数量不少于四个。
13.优选的是,步骤s3中的赋予第三杆与w方向或z方向的夹角或者第四杆与w方向或z方向的夹角多个值分别为0
°
、预设角度、1/2预设角度和负预设角度。
14.优选的是,步骤s2中的第三杆与w方向或z方向的夹角或者第四杆与w方向或z方向的夹角均为杆与w方向或z方向沿顺时针方向的夹角。
15.优选的是,令第一杆的长度为1。
16.优选的是,步骤s4中建立的所述四杆的关系式数量不少于3个。
17.优选的是,步骤s4预设的所述第三杆与w方向或z方向的夹角对应所述第四杆与w方向或z方向的夹角的比值为1/2。
18.优选的是,由步骤s4预设的所述第三杆与w方向或z方向的夹角对应所述第四杆与w方向或z方向的夹角的比值为1/2与预设前舵转动30
°
后舵转动60度验证所述杆长交点位置的合理性。
19.本技术的优点包括:
20.1、通过简化几何关系,方程求解,进行拉杆前后点位置确定。
21.2、精准的计算求解,得到准确的位置设计,保证舵面偏转的设计准确型。
22.3、在多个型号中经过验证,已有飞机经过飞行验证及鉴定。
附图说明
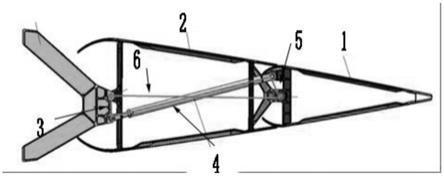
23.图1是本技术随动舵面驱动拉杆结构示意图;
24.图2本技术随动舵面驱动拉杆结构示意图;
25.图3本技术随动舵面驱动拉杆结构简化示意图;
26.图4是计算结果与实际拟合曲线图。
27.其中,1-前舵,2-后舵,3-第一杆,4-第二杆,5-第三杆,6-第四杆。
具体实施方式
28.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。下面通过参考附图描述的实施方式是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。下面结合附图对本技术的实施方式进行详细说明。
29.一种随动舵面驱动拉杆的交点确定方法,所述随动舵面包括前舵1,绕前舵1摆动的后舵2;
30.前舵1铰接第一杆3,第一杆3铰接第二杆4,第二杆4铰接第三杆5,第三杆5铰接第四杆6,第三杆5为后舵2的一部分,第一杆3、第二杆4、第三杆5和第四杆6构成平面四杆机构如图1和图2所示;
31.确定随动舵面驱动拉杆的交点确定方法,其特征在于,包括以下步骤:
32.步骤s1:令垂直第一杆3的方向为w方向,垂直于所述w方向的为z方向,以平面四杆机构z和w方向的矢量长度和作为直角三角形的两条直角边,第一杆3为斜边构建一个直角三角形;
33.步骤s2:根据所述直角三角形的三边关系构建四条杆的长度、第三杆5与z方向的夹角为y、第四杆6与w的夹角为x,第一杆3长度为1,第二杆4长度为a,第三杆5的长度为b,第四杆6的长度c,利用勾股定理构建四杆两角的关系等式。
34.向一侧偏转时:
35.(csiny+asinx+1)2+(a cosx+c cosy)2=b2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
36.向另一侧偏转时:
37.(asinx-csiny-1)2+(a cosx+c cosy)2=b2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
38.步骤s3:赋予第三杆5与w方向或z方向的夹角或者第四杆6与w方向或z方向的夹角四个值,代入步骤2所述四杆两角的关系等式,构建四杆一角的关系等式,因为杆件有三个未知数,为了能够顺利求值,设定角度数量因足够多;
39.当x=0
°
时(1)式和(2)式等价,推出:
[0040][0041]
其中,推出
[0042][0043]
当x=α时代入(1)式,推出:
[0044][0045]
其中,
[0046][0047]
当时代入(1)式,推出:
[0048][0049]
当x=-α时代入(2)式,推出:
[0050][0051]
其中,
[0052][0053]
步骤s4:由预设的所述第三杆5与w方向或z方向的夹角对应所述第四杆6与w方向或z方向的夹角的比值,建立四杆的关系式,通过已知杆长求解未知杆长,并确定杆长交点位置。
[0054]
根据3-6的关系,构建下述联立方程
[0055]y1-y0=k
×
α
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0056][0057]y0-y2=k
×
α
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0058]
其中已知倍数关系k和前舵的偏转角α,通过(7)~(9)可以求出a、b、c的值,四根杆的比例便知,只要知道四根杆的其中一个长度即可确定四根杆的长度。
[0059]
下面结合实例进行说明:
[0060]
该方向舵中的a=8.115,b=7.923,c=1,分别代入(3)、(4)、(5)式得:
[0061]
y0=115
°
,y1=169.19
°
,y2=61.1
°
。
[0062]
满足y
1-y0=54
°
,y
0-y2=54
°
的要求,说明了该公式的正确性。
[0063]
下面我们可以通过方程与y=2x斜线对比,逼近y=2x斜线的,在整个运动过程中,转角变化更接近1:2的关系。
[0064]
对(1)式进行展开,并代入数值得:
[0065][0066][0067]
其中
[0068][0069]
对(2)式进行展开,并代入数值得:
[0070][0071][0072][0073]
现在我们来拟合f
(x)
=y-y0曲线,其中y0=115
°
。如图4所示,计算所得的值与实际无线逼近,验证方法的正确性。
[0074]
以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1