一种自动化的四旋翼无人机收放系统
1.本实用新型涉及一种自动化的四旋翼无人机收放系统,属于无人机技术领域。
背景技术:
2.如今,四旋翼无人机的使用已经越来越广泛,但无人机的放飞、回收以及使用后所需的充电等维护工作目前皆要由人工来完成。这也就导致如果想要大规模的使用无人机必然要付出大量的人力在无人机的收放与后勤维护上,这大大加大了人工成本,使得无人机这种本应能够减轻人力负担的自动化设备的价值大大降低,导致无人机这项新兴技术难以在更广的领域内为大众提供服务。
技术实现要素:
3.本实用新型的目的在于,提供一种自动化的四旋翼无人机收放系统,本实用新型自动化程度高,功能全面,无人机的放飞、回收以及使用后所需的充电等维护工作均为自动化控制,省时省力,降低人工成本。
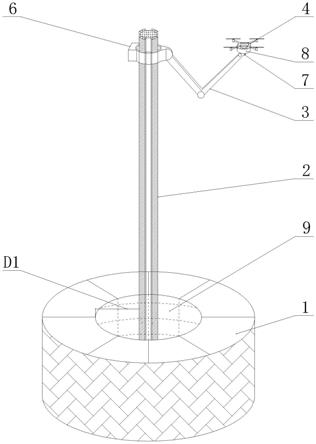
4.为解决上述技术问题,本实用新型采用如下的技术方案:一种自动化的四旋翼无人机收放系统,包括机库、支撑柱、机械臂、四旋翼无人机、控制系统、a旋转装置、b旋转装置和c旋转装置,支撑柱设置在机库中部,支撑柱的外壁与机库的距离为d1,机械臂的一端通过a旋转装置与支撑柱连接,机械臂的另一端与b旋转装置的底部连接,四旋翼无人机通过c旋转装置与b旋转装置连接,控制系统与机械臂通过无线通信技术连接,自动化程度高,功能全面,四旋翼无人机的放飞、回收以及使用后所需的充电等维护工作均为自动化控制,省时省力,降低人工成本。
5.前述的一种自动化的四旋翼无人机收放系统,所述所述机库为圆环结构,支撑柱布置在机库的圆心位置,机库包括多个隔间,所述隔间内设置有充电模块和电量监控模块,充电模块和电量监控模块线路连接;四旋翼无人机回收至隔间后,电量监控模块对四旋翼无人机的电量进行监控,电量不足时,电量监控模块对充电模块发出充电指令,充电模块对四旋翼无人机进行充电,电量充满后,电量监控模块对充电模块发出断电指令,充电模块停止对四旋翼无人机充电,电量监控模块避免了过充现象。
6.前述的一种自动化的四旋翼无人机收放系统,所述支撑柱上等距间隔圆周设置有四组滑道,a旋转装置与滑道滑动连接,支撑柱的底部设置有支撑底座,支撑底座布置在机库的圆心位置;滑道使a旋转装置能沿着支撑柱循环往复的上下运动,实现机械臂对四旋翼无人机放飞、回收操作。
7.前述的一种自动化的四旋翼无人机收放系统,所述所述四旋翼无人机底部设置有外挂模块,外挂模块与四旋翼无人机线路连接,外挂模块包括壳体和外挂底板,外挂底板通过壳体与四旋翼无人机底部连接;外挂模块实现对四旋翼无人机的在线控制。
8.前述的一种自动化的四旋翼无人机收放系统,所述充电模块包括电源盒,电源盒上设置有a磁铁和a电源装置,a磁铁设置在a电源装置的上方,电源盒的底部设置有a弹簧,
电源盒的底部通过a弹簧与隔间的底面连接;电量监控模块对充电模块发出充电指令时,a磁铁对四旋翼无人机进行吸附,a电源装置对四旋翼无人机进行充电操作,电量监控模块对充电模块发出断电指令时,a磁铁对四旋翼无人机停止吸附,a电源装置对四旋翼无人机停止充电。
9.前述的一种自动化的四旋翼无人机收放系统,所述壳体包括b弹簧、a电磁铁、b电源装置和充电接口,b弹簧的一端与壳体连接,b弹簧的一端与a电磁铁连接,a电磁铁与b电源装置连接,b电源装置的两端与壳体连接,b电源装置布置在充电接口的上方;电量监控模块对充电模块发出充电指令时,a磁铁对a电磁铁进行吸附,a电源装置与充电接口连通,对四旋翼无人机进行充电,电量监控模块对充电模块发出断电指令时,a磁铁对a电磁铁停止吸附,a电源装置与充电接口断开连接。
10.前述的一种自动化的四旋翼无人机收放系统,所述外挂底板中部设置有贯穿的圆孔,外挂底板的上表面从下至上依次设置有c弹簧、b电磁铁和c电源装置,外挂底板的下表面从内到外依次设置有凹陷部、铜环和铜片,c弹簧的直径大于圆孔的直径,b电磁铁的剖面为t字型结构,b电磁铁的顶部直径大于c弹簧的直径,b电磁铁的底部直径小于圆孔的直径,b电磁铁的底部穿设于圆孔,凹陷部直径大于b电磁铁的直径。
11.前述的一种自动化的四旋翼无人机收放系统,所述c旋转装置的底部与b旋转装置的顶部连接,c旋转装置包括从内到外依次布置的凸起柱、旋转部和外环,凸起柱与旋转部固定连接,旋转部与外环活动连接,旋转部上设置有金属探针,外环上设置有金属接片,凹陷部的内径与凸起柱的外径相同,凹陷部的深度与凸起柱凸出于旋转部的高度相同,所述凸起柱为电磁铁柱;回收四旋翼无人机时,凸起柱与凹陷部连接,金属探针与铜环连接,使c旋转装置与外挂模块电连通,凸起柱与b电磁铁吸附,使b电磁铁与c电源装置断开连接,四旋翼无人机停止运动,旋转部进行旋转,使金属接片与铜片接触,旋转部停止旋转。
12.前述的一种自动化的四旋翼无人机收放系统,所述控制系统包括定位模块、机械臂控制模块和隔间控制模块;定位模块控制机械臂的运动方向,定位模块采用超宽带无线通信定位技术,在接收到四旋翼无人机的定位信息后,机械臂能准确与四旋翼无人机进行对接,能准确放飞、回收四旋翼无人机;隔间控制模块对隔间的使用情况进行监控,隔间控制模块与机械臂控制模块配合,实现对四旋翼无人机的储存进行自动化控制。
13.前述的一种自动化的四旋翼无人机收放系统,所述a旋转装置、b旋转装置和c旋转装置均为舵机;a旋转装置为360度可控角度舵机,b旋转装置为180度可控角度舵机,c旋转装置为360度连续旋转舵机,能满足机械臂与四旋翼无人机使用要求。
14.与现有技术相比,本实用新型包括机库、支撑柱、机械臂、四旋翼无人机、控制系统、a旋转装置、b旋转装置和c旋转装置,控制系统与机械臂通过无线通信技术连接,控制系统与四旋翼无人机通过无线通信技术连接,机库包括多个隔间,隔间内设置有充电模块、电量监控模块和隔板,本实用新型在四旋翼无人机回收至隔间后,电量监控模块对四旋翼无人机的电量进行监控,电量不足时,电量监控模块对充电模块发出充电指令,充电模块对四旋翼无人机进行充电,电量充满后,电量监控模块对充电模块发出断电指令,充电模块停止对四旋翼无人机充电,电量监控模块避免了过充现象,控制系统包括定位模块、无人机控制模块、机械臂控制模块和隔间控制模块,多模块相互配合,实现对四旋翼无人机的放飞、回收、储存及充电进行自动化控制,本实用新型自动化程度高,功能全面,四旋翼无人机的放
飞、回收以及使用后所需的存储和充电等维护工作均为自动化控制,省时省力,降低人工成本。
附图说明
15.图1是本实用新型的结构示意图;
16.图2是本实用新型中隔间的结构示意图;
17.图3是本实用新型中充电模块和壳体的结构示意图;
18.图4是本实用新型中机库、支撑柱和支撑底座的结构示意图;
19.图5是本实用新型中支撑柱、a旋转装置、机械臂和四旋翼无人机的结构示意图;
20.图6是本实用新型中外挂底板和c电源装置的结构示意图;
21.图7是本实用新型中外挂模块的剖面图;
22.图8是本实用新型中c旋转装置的结构示意图;
23.图9是本实用新型中控制系统的示意图。
24.附图标记:1
‑
机库,2
‑
支撑柱,3
‑
机械臂,4
‑
四旋翼无人机,5
‑
控制系统,6
‑
a旋转装置,7
‑
b旋转装置,8
‑
c旋转装置,9
‑
隔间,10
‑
充电模块,11
‑
电量监控模块,12
‑
滑道,13
‑
支撑底座,14
‑
外挂模块,15
‑
壳体,16
‑
外挂底板,17
‑
电源盒,18
‑
a磁铁,19
‑
a电源装置,20
‑
a弹簧,21
‑
b弹簧,22
‑
a电磁铁,23
‑
b电源装置,24
‑
充电接口,25
‑
圆孔,26
‑
c弹簧,27
‑
b电磁铁,28
‑
c电源装置,29
‑
凹陷部,30
‑
铜环,31
‑
铜片,32
‑
凸起柱,33
‑
旋转部,34
‑
外环,35
‑
金属探针,36
‑
金属接片。
25.下面结合附图和具体实施方式对本实用新型作进一步的说明。
具体实施方式
26.本实用新型的实施例1:一种自动化的四旋翼无人机收放系统,包括机库1、支撑柱2、机械臂3、四旋翼无人机4、控制系统5、a旋转装置6、b旋转装置7和c旋转装置8,支撑柱2设置在机库1中部,支撑柱2的外壁与机库1的距离为d1,机械臂3的一端通过a旋转装置6与支撑柱2连接,机械臂3的另一端与b旋转装置7的底部连接,四旋翼无人机4通过c旋转装置8与b旋转装置7连接,控制系统5与机械臂3通过无线通信技术连接,自动化程度高,功能全面,四旋翼无人机4的放飞、回收以及使用后所需的充电等维护工作均为自动化控制,省时省力,降低人工成本。
27.本实用新型的实施例2:一种自动化的四旋翼无人机收放系统,包括机库1、支撑柱2、机械臂3、四旋翼无人机4、控制系统5、a旋转装置6、b旋转装置7和c旋转装置8,支撑柱2设置在机库1中部,支撑柱2的外壁与机库1的距离为d1,机械臂3的一端通过a旋转装置6与支撑柱2连接,机械臂3的另一端与b旋转装置7的底部连接,四旋翼无人机4通过c旋转装置8与b旋转装置7连接,控制系统5与机械臂3通过无线通信技术连接,自动化程度高,功能全面,四旋翼无人机4的放飞、回收以及使用后所需的充电等维护工作均为自动化控制,省时省力,降低人工成本;所述所述机库1为圆环结构,支撑柱2布置在机库1的圆心位置,机库1包括多个隔间9,所述隔间9内设置有充电模块10和电量监控模块11,充电模块10和电量监控模块11线路连接;四旋翼无人机4回收至隔间9后,电量监控模块11对四旋翼无人机4的电量进行监控,电量不足时,电量监控模块11对充电模块10发出充电指令,充电模块10对四旋翼
无人机4进行充电,电量充满后,电量监控模块11对充电模块10发出断电指令,充电模块10停止对四旋翼无人机4充电,电量监控模块11避免了过充现象。
28.本实用新型的实施例3:一种自动化的四旋翼无人机收放系统,包括机库1、支撑柱2、机械臂3、四旋翼无人机4、控制系统5、a旋转装置6、b旋转装置7和c旋转装置8,支撑柱2设置在机库1中部,支撑柱2的外壁与机库1的距离为d1,机械臂3的一端通过a旋转装置6与支撑柱2连接,机械臂3的另一端与b旋转装置7的底部连接,四旋翼无人机4通过c旋转装置8与b旋转装置7连接,控制系统5与机械臂3通过无线通信技术连接,自动化程度高,功能全面,四旋翼无人机4的放飞、回收以及使用后所需的充电等维护工作均为自动化控制,省时省力,降低人工成本;所述所述机库1为圆环结构,支撑柱2布置在机库1的圆心位置,机库1包括多个隔间9,所述隔间9内设置有充电模块10和电量监控模块11,充电模块10和电量监控模块11线路连接;四旋翼无人机4回收至隔间9后,电量监控模块11对四旋翼无人机4的电量进行监控,电量不足时,电量监控模块11对充电模块10发出充电指令,充电模块10对四旋翼无人机4进行充电,电量充满后,电量监控模块11对充电模块10发出断电指令,充电模块10停止对四旋翼无人机4充电,电量监控模块11避免了过充现象;所述支撑柱2上等距间隔圆周设置有四组滑道12,a旋转装置6与滑道12滑动连接,支撑柱2的底部设置有支撑底座13,支撑底座13布置在机库1的圆心位置;滑道12使a旋转装置6能沿着支撑柱2循环往复的上下运动,实现机械臂3对四旋翼无人机4放飞、回收操作。
29.本实用新型的实施例4:一种自动化的四旋翼无人机收放系统,包括机库1、支撑柱2、机械臂3、四旋翼无人机4、控制系统5、a旋转装置6、b旋转装置7和c旋转装置8,支撑柱2设置在机库1中部,支撑柱2的外壁与机库1的距离为d1,机械臂3的一端通过a旋转装置6与支撑柱2连接,机械臂3的另一端与b旋转装置7的底部连接,四旋翼无人机4通过c旋转装置8与b旋转装置7连接,控制系统5与机械臂3通过无线通信技术连接,自动化程度高,功能全面,四旋翼无人机4的放飞、回收以及使用后所需的充电等维护工作均为自动化控制,省时省力,降低人工成本;所述所述机库1为圆环结构,支撑柱2布置在机库1的圆心位置,机库1包括多个隔间9,所述隔间9内设置有充电模块10和电量监控模块11,充电模块10和电量监控模块11线路连接;四旋翼无人机4回收至隔间9后,电量监控模块11对四旋翼无人机4的电量进行监控,电量不足时,电量监控模块11对充电模块10发出充电指令,充电模块10对四旋翼无人机4进行充电,电量充满后,电量监控模块11对充电模块10发出断电指令,充电模块10停止对四旋翼无人机4充电,电量监控模块11避免了过充现象;所述支撑柱2上等距间隔圆周设置有四组滑道12,a旋转装置6与滑道12滑动连接,支撑柱2的底部设置有支撑底座13,支撑底座13布置在机库1的圆心位置;滑道12使a旋转装置6能沿着支撑柱2循环往复的上下运动,实现机械臂3对四旋翼无人机4放飞、回收操作;所述所述四旋翼无人机4底部设置有外挂模块14,外挂模块14与四旋翼无人机4线路连接,外挂模块14包括壳体15和外挂底板16,外挂底板16通过壳体15与四旋翼无人机4底部连接;外挂模块14实现机械臂3对四旋翼无人机4的定位与捕获。
30.本实用新型的实施例5:一种自动化的四旋翼无人机收放系统,包括机库1、支撑柱2、机械臂3、四旋翼无人机4、控制系统5、a旋转装置6、b旋转装置7和c旋转装置8,支撑柱2设置在机库1中部,支撑柱2的外壁与机库1的距离为d1,机械臂3的一端通过a旋转装置6与支撑柱2连接,机械臂3的另一端与b旋转装置7的底部连接,四旋翼无人机4通过c旋转装置8与
b旋转装置7连接,控制系统5与机械臂3通过无线通信技术连接,自动化程度高,功能全面,四旋翼无人机4的放飞、回收以及使用后所需的充电等维护工作均为自动化控制,省时省力,降低人工成本;所述所述机库1为圆环结构,支撑柱2布置在机库1的圆心位置,机库1包括多个隔间9,所述隔间9内设置有充电模块10和电量监控模块11,充电模块10和电量监控模块11线路连接;四旋翼无人机4回收至隔间9后,电量监控模块11对四旋翼无人机4的电量进行监控,电量不足时,电量监控模块11对充电模块10发出充电指令,充电模块10对四旋翼无人机4进行充电,电量充满后,电量监控模块11对充电模块10发出断电指令,充电模块10停止对四旋翼无人机4充电,电量监控模块11避免了过充现象;所述支撑柱2上等距间隔圆周设置有四组滑道12,a旋转装置6与滑道12滑动连接,支撑柱2的底部设置有支撑底座13,支撑底座13布置在机库1的圆心位置;滑道12使a旋转装置6能沿着支撑柱2循环往复的上下运动,实现机械臂3对四旋翼无人机4放飞、回收操作;所述所述四旋翼无人机4底部设置有外挂模块14,外挂模块14与四旋翼无人机4线路连接,外挂模块14包括壳体15和外挂底板16,外挂底板16通过壳体15与四旋翼无人机4底部连接;外挂模块14实现机械臂3对四旋翼无人机4的定位与捕获;所述充电模块10包括电源盒17,电源盒17上设置有a磁铁18和a电源装置19,a磁铁18设置在a电源装置19的上方,电源盒17的底部设置有a弹簧20,电源盒17的底部通过a弹簧20与隔间9的底面连接;电量监控模块11对充电模块10发出充电指令时,a磁铁18对四旋翼无人机4进行吸附,a电源装置19对四旋翼无人机4进行充电操作,电量监控模块11对充电模块10发出断电指令时,a磁铁18对四旋翼无人机4停止吸附,a电源装置19对四旋翼无人机4停止充电。
31.本实用新型的实施例6:一种自动化的四旋翼无人机收放系统,包括机库1、支撑柱2、机械臂3、四旋翼无人机4、控制系统5、a旋转装置6、b旋转装置7和c旋转装置8,支撑柱2设置在机库1中部,支撑柱2的外壁与机库1的距离为d1,机械臂3的一端通过a旋转装置6与支撑柱2连接,机械臂3的另一端与b旋转装置7的底部连接,四旋翼无人机4通过c旋转装置8与b旋转装置7连接,控制系统5与机械臂3通过无线通信技术连接,自动化程度高,功能全面,四旋翼无人机4的放飞、回收以及使用后所需的充电等维护工作均为自动化控制,省时省力,降低人工成本;所述所述机库1为圆环结构,支撑柱2布置在机库1的圆心位置,机库1包括多个隔间9,所述隔间9内设置有充电模块10和电量监控模块11,充电模块10和电量监控模块11线路连接;四旋翼无人机4回收至隔间9后,电量监控模块11对四旋翼无人机4的电量进行监控,电量不足时,电量监控模块11对充电模块10发出充电指令,充电模块10对四旋翼无人机4进行充电,电量充满后,电量监控模块11对充电模块10发出断电指令,充电模块10停止对四旋翼无人机4充电,电量监控模块11避免了过充现象;所述支撑柱2上等距间隔圆周设置有四组滑道12,a旋转装置6与滑道12滑动连接,支撑柱2的底部设置有支撑底座13,支撑底座13布置在机库1的圆心位置;滑道12使a旋转装置6能沿着支撑柱2循环往复的上下运动,实现机械臂3对四旋翼无人机4放飞、回收操作;所述所述四旋翼无人机4底部设置有外挂模块14,外挂模块14与四旋翼无人机4线路连接,外挂模块14包括壳体15和外挂底板16,外挂底板16通过壳体15与四旋翼无人机4底部连接;外挂模块14实现机械臂3对四旋翼无人机4的定位与捕获;所述充电模块10包括电源盒17,电源盒17上设置有a磁铁18和a电源装置19,a磁铁18设置在a电源装置19的上方,电源盒17的底部设置有a弹簧20,电源盒17的底部通过a弹簧20与隔间9的底面连接;电量监控模块11对充电模块10发出充电指令时,a磁
铁18对四旋翼无人机4进行吸附,a电源装置19对四旋翼无人机4进行充电操作,电量监控模块11对充电模块10发出断电指令时,a磁铁18对四旋翼无人机4停止吸附,a电源装置19对四旋翼无人机4停止充电;所述壳体15包括b弹簧21、a电磁铁22、b电源装置23和充电接口24,b弹簧21的一端与壳体15连接,b弹簧21的一端与a电磁铁22连接,a电磁铁22与b电源装置23连接,b电源装置23的两端与壳体15连接,b电源装置23布置在充电接口24的上方;电量监控模块11对充电模块10发出充电指令时,a磁铁18对a电磁铁22进行吸附,a电源装置19与充电接口24连通,对四旋翼无人机4进行充电,电量监控模块11对充电模块10发出断电指令时,a磁铁18对a电磁铁22停止吸附,a电源装置19与充电接口24断开连接。
32.本实用新型的实施例7:一种自动化的四旋翼无人机收放系统,包括机库1、支撑柱2、机械臂3、四旋翼无人机4、控制系统5、a旋转装置6、b旋转装置7和c旋转装置8,支撑柱2设置在机库1中部,支撑柱2的外壁与机库1的距离为d1,机械臂3的一端通过a旋转装置6与支撑柱2连接,机械臂3的另一端与b旋转装置7的底部连接,四旋翼无人机4通过c旋转装置8与b旋转装置7连接,控制系统5与机械臂3通过无线通信技术连接,自动化程度高,功能全面,四旋翼无人机4的放飞、回收以及使用后所需的充电等维护工作均为自动化控制,省时省力,降低人工成本;所述所述机库1为圆环结构,支撑柱2布置在机库1的圆心位置,机库1包括多个隔间9,所述隔间9内设置有充电模块10和电量监控模块11,充电模块10和电量监控模块11线路连接;四旋翼无人机4回收至隔间9后,电量监控模块11对四旋翼无人机4的电量进行监控,电量不足时,电量监控模块11对充电模块10发出充电指令,充电模块10对四旋翼无人机4进行充电,电量充满后,电量监控模块11对充电模块10发出断电指令,充电模块10停止对四旋翼无人机4充电,电量监控模块11避免了过充现象;所述支撑柱2上等距间隔圆周设置有四组滑道12,a旋转装置6与滑道12滑动连接,支撑柱2的底部设置有支撑底座13,支撑底座13布置在机库1的圆心位置;滑道12使a旋转装置6能沿着支撑柱2循环往复的上下运动,实现机械臂3对四旋翼无人机4放飞、回收操作;所述所述四旋翼无人机4底部设置有外挂模块14,外挂模块14与四旋翼无人机4线路连接,外挂模块14包括壳体15和外挂底板16,外挂底板16通过壳体15与四旋翼无人机4底部连接;外挂模块14实现机械臂3对四旋翼无人机4的定位与捕获;所述充电模块10包括电源盒17,电源盒17上设置有a磁铁18和a电源装置19,a磁铁18设置在a电源装置19的上方,电源盒17的底部设置有a弹簧20,电源盒17的底部通过a弹簧20与隔间9的底面连接;电量监控模块11对充电模块10发出充电指令时,a磁铁18对四旋翼无人机4进行吸附,a电源装置19对四旋翼无人机4进行充电操作,电量监控模块11对充电模块10发出断电指令时,a磁铁18对四旋翼无人机4停止吸附,a电源装置19对四旋翼无人机4停止充电;所述壳体15包括b弹簧21、a电磁铁22、b电源装置23和充电接口24,b弹簧21的一端与壳体15连接,b弹簧21的一端与a电磁铁22连接,a电磁铁22与b电源装置23连接,b电源装置23的两端与壳体15连接,b电源装置23布置在充电接口24的上方;电量监控模块11对充电模块10发出充电指令时,a磁铁18对a电磁铁22进行吸附,a电源装置19与充电接口24连通,对四旋翼无人机4进行充电,电量监控模块11对充电模块10发出断电指令时,a磁铁18对a电磁铁22停止吸附,a电源装置19与充电接口24断开连接;所述外挂底板16中部设置有贯穿的圆孔25,外挂底板16的上表面从下至上依次设置有c弹簧26、b电磁铁27和c电源装置28,外挂底板16的下表面从内到外依次设置有凹陷部29、铜环30和铜片31,c弹簧26的直径大于圆孔25的直径,b电磁铁27的剖面为t字型结构,b电磁铁27的顶部直径大于c弹
簧26的直径,b电磁铁27的底部直径小于圆孔25的直径,b电磁铁27的底部穿设于圆孔25,凹陷部29直径大于b电磁铁27的直径。
33.本实用新型的实施例8:一种自动化的四旋翼无人机收放系统,包括机库1、支撑柱2、机械臂3、四旋翼无人机4、控制系统5、a旋转装置6、b旋转装置7和c旋转装置8,支撑柱2设置在机库1中部,支撑柱2的外壁与机库1的距离为d1,机械臂3的一端通过a旋转装置6与支撑柱2连接,机械臂3的另一端与b旋转装置7的底部连接,四旋翼无人机4通过c旋转装置8与b旋转装置7连接,控制系统5与机械臂3通过无线通信技术连接,自动化程度高,功能全面,四旋翼无人机4的放飞、回收以及使用后所需的充电等维护工作均为自动化控制,省时省力,降低人工成本;所述所述机库1为圆环结构,支撑柱2布置在机库1的圆心位置,机库1包括多个隔间9,所述隔间9内设置有充电模块10和电量监控模块11,充电模块10和电量监控模块11线路连接;四旋翼无人机4回收至隔间9后,电量监控模块11对四旋翼无人机4的电量进行监控,电量不足时,电量监控模块11对充电模块10发出充电指令,充电模块10对四旋翼无人机4进行充电,电量充满后,电量监控模块11对充电模块10发出断电指令,充电模块10停止对四旋翼无人机4充电,电量监控模块11避免了过充现象;所述支撑柱2上等距间隔圆周设置有四组滑道12,a旋转装置6与滑道12滑动连接,支撑柱2的底部设置有支撑底座13,支撑底座13布置在机库1的圆心位置;滑道12使a旋转装置6能沿着支撑柱2循环往复的上下运动,实现机械臂3对四旋翼无人机4放飞、回收操作;所述所述四旋翼无人机4底部设置有外挂模块14,外挂模块14与四旋翼无人机4线路连接,外挂模块14包括壳体15和外挂底板16,外挂底板16通过壳体15与四旋翼无人机4底部连接;外挂模块14实现机械臂3对四旋翼无人机4的定位与捕获;所述充电模块10包括电源盒17,电源盒17上设置有a磁铁18和a电源装置19,a磁铁18设置在a电源装置19的上方,电源盒17的底部设置有a弹簧20,电源盒17的底部通过a弹簧20与隔间9的底面连接;电量监控模块11对充电模块10发出充电指令时,a磁铁18对四旋翼无人机4进行吸附,a电源装置19对四旋翼无人机4进行充电操作,电量监控模块11对充电模块10发出断电指令时,a磁铁18对四旋翼无人机4停止吸附,a电源装置19对四旋翼无人机4停止充电;所述壳体15包括b弹簧21、a电磁铁22、b电源装置23和充电接口24,b弹簧21的一端与壳体15连接,b弹簧21的一端与a电磁铁22连接,a电磁铁22与b电源装置23连接,b电源装置23的两端与壳体15连接,b电源装置23布置在充电接口24的上方;电量监控模块11对充电模块10发出充电指令时,a磁铁18对a电磁铁22进行吸附,a电源装置19与充电接口24连通,对四旋翼无人机4进行充电,电量监控模块11对充电模块10发出断电指令时,a磁铁18对a电磁铁22停止吸附,a电源装置19与充电接口24断开连接;所述外挂底板16中部设置有贯穿的圆孔25,外挂底板16的上表面从下至上依次设置有c弹簧26、b电磁铁27和c电源装置28,外挂底板16的下表面从内到外依次设置有凹陷部29、铜环30和铜片31,c弹簧26的直径大于圆孔25的直径,b电磁铁27的剖面为t字型结构,b电磁铁27的顶部直径大于c弹簧26的直径,b电磁铁27的底部直径小于圆孔25的直径,b电磁铁27的底部穿设于圆孔25,凹陷部29直径大于b电磁铁27的直径;所述c旋转装置8的底部与b旋转装置7的顶部连接,c旋转装置8包括从内到外依次布置的凸起柱32、旋转部33和外环34,凸起柱32与旋转部33固定连接,旋转部33与外环34活动连接,旋转部33上设置有金属探针35,外环34上设置有金属接片36,凹陷部29的内径与凸起柱32的外径相同,凹陷部29的深度与凸起柱32凸出于旋转部33的高度相同,所述凸起柱32为电磁铁柱;回收四旋翼无人机4时,凸起柱32与凹陷部29连
接,金属探针35与铜环30连接,使c旋转装置8与外挂模块14电连通,凸起柱32与b电磁铁27吸附,使b电磁铁27与c电源装置28断开连接,四旋翼无人机4停止运动,旋转部33进行旋转,使金属接片36与铜片31接触,旋转部33停止旋转。
34.本实用新型的实施例9:一种自动化的四旋翼无人机收放系统,包括机库1、支撑柱2、机械臂3、四旋翼无人机4、控制系统5、a旋转装置6、b旋转装置7和c旋转装置8,支撑柱2设置在机库1中部,支撑柱2的外壁与机库1的距离为d1,机械臂3的一端通过a旋转装置6与支撑柱2连接,机械臂3的另一端与b旋转装置7的底部连接,四旋翼无人机4通过c旋转装置8与b旋转装置7连接,控制系统5与机械臂3通过无线通信技术连接,自动化程度高,功能全面,四旋翼无人机4的放飞、回收以及使用后所需的充电等维护工作均为自动化控制,省时省力,降低人工成本;所述所述机库1为圆环结构,支撑柱2布置在机库1的圆心位置,机库1包括多个隔间9,所述隔间9内设置有充电模块10和电量监控模块11,充电模块10和电量监控模块11线路连接;四旋翼无人机4回收至隔间9后,电量监控模块11对四旋翼无人机4的电量进行监控,电量不足时,电量监控模块11对充电模块10发出充电指令,充电模块10对四旋翼无人机4进行充电,电量充满后,电量监控模块11对充电模块10发出断电指令,充电模块10停止对四旋翼无人机4充电,电量监控模块11避免了过充现象;所述支撑柱2上等距间隔圆周设置有四组滑道12,a旋转装置6与滑道12滑动连接,支撑柱2的底部设置有支撑底座13,支撑底座13布置在机库1的圆心位置;滑道12使a旋转装置6能沿着支撑柱2循环往复的上下运动,实现机械臂3对四旋翼无人机4放飞、回收操作;所述所述四旋翼无人机4底部设置有外挂模块14,外挂模块14与四旋翼无人机4线路连接,外挂模块14包括壳体15和外挂底板16,外挂底板16通过壳体15与四旋翼无人机4底部连接;外挂模块14实现机械臂3对四旋翼无人机4的定位与捕获;所述充电模块10包括电源盒17,电源盒17上设置有a磁铁18和a电源装置19,a磁铁18设置在a电源装置19的上方,电源盒17的底部设置有a弹簧20,电源盒17的底部通过a弹簧20与隔间9的底面连接;电量监控模块11对充电模块10发出充电指令时,a磁铁18对四旋翼无人机4进行吸附,a电源装置19对四旋翼无人机4进行充电操作,电量监控模块11对充电模块10发出断电指令时,a磁铁18对四旋翼无人机4停止吸附,a电源装置19对四旋翼无人机4停止充电;所述壳体15包括b弹簧21、a电磁铁22、b电源装置23和充电接口24,b弹簧21的一端与壳体15连接,b弹簧21的一端与a电磁铁22连接,a电磁铁22与b电源装置23连接,b电源装置23的两端与壳体15连接,b电源装置23布置在充电接口24的上方;电量监控模块11对充电模块10发出充电指令时,a磁铁18对a电磁铁22进行吸附,a电源装置19与充电接口24连通,对四旋翼无人机4进行充电,电量监控模块11对充电模块10发出断电指令时,a磁铁18对a电磁铁22停止吸附,a电源装置19与充电接口24断开连接;所述外挂底板16中部设置有贯穿的圆孔25,外挂底板16的上表面从下至上依次设置有c弹簧26、b电磁铁27和c电源装置28,外挂底板16的下表面从内到外依次设置有凹陷部29、铜环30和铜片31,c弹簧26的直径大于圆孔25的直径,b电磁铁27的剖面为t字型结构,b电磁铁27的顶部直径大于c弹簧26的直径,b电磁铁27的底部直径小于圆孔25的直径,b电磁铁27的底部穿设于圆孔25,凹陷部29直径大于b电磁铁27的直径;所述c旋转装置8的底部与b旋转装置7的顶部连接,c旋转装置8包括从内到外依次布置的凸起柱32、旋转部33和外环34,凸起柱32与旋转部33固定连接,旋转部33与外环34活动连接,旋转部33上设置有金属探针35,外环34上设置有金属接片36,凹陷部29的内径与凸起柱32的外径相同,凹陷部29的深度与凸起柱32凸出于旋转部
33的高度相同,所述凸起柱32为电磁铁柱;回收四旋翼无人机4时,凸起柱32与凹陷部29连接,金属探针35与铜环30连接,使c旋转装置8与外挂模块14电连通,凸起柱32与b电磁铁27吸附,使b电磁铁27与c电源装置28断开连接,四旋翼无人机4停止运动,旋转部33进行旋转,使金属接片36与铜片31接触,旋转部33停止旋转;所述控制系统5包括定位模块、机械臂控制模块和隔间控制模块;定位模块控制机械臂3的运动方向,定位模块采用超宽带无线通信定位技术,在接收到四旋翼无人机4的定位信息后,机械臂3能准确与四旋翼无人机4进行对接,能准确放飞、回收四旋翼无人机4;隔间控制模块对隔间9的使用情况进行监控,隔间控制模块与机械臂控制模块配合,实现对四旋翼无人机4的储存进行自动化控制。
35.本实用新型的实施例10:一种自动化的四旋翼无人机收放系统,包括机库1、支撑柱2、机械臂3、四旋翼无人机4、控制系统5、a旋转装置6、b旋转装置7和c旋转装置8,支撑柱2设置在机库1中部,支撑柱2的外壁与机库1的距离为d1,机械臂3的一端通过a旋转装置6与支撑柱2连接,机械臂3的另一端与b旋转装置7的底部连接,四旋翼无人机4通过c旋转装置8与b旋转装置7连接,控制系统5与机械臂3通过无线通信技术连接,自动化程度高,功能全面,四旋翼无人机4的放飞、回收以及使用后所需的充电等维护工作均为自动化控制,省时省力,降低人工成本;所述所述机库1为圆环结构,支撑柱2布置在机库1的圆心位置,机库1包括多个隔间9,所述隔间9内设置有充电模块10和电量监控模块11,充电模块10和电量监控模块11线路连接;四旋翼无人机4回收至隔间9后,电量监控模块11对四旋翼无人机4的电量进行监控,电量不足时,电量监控模块11对充电模块10发出充电指令,充电模块10对四旋翼无人机4进行充电,电量充满后,电量监控模块11对充电模块10发出断电指令,充电模块10停止对四旋翼无人机4充电,电量监控模块11避免了过充现象;所述支撑柱2上等距间隔圆周设置有四组滑道12,a旋转装置6与滑道12滑动连接,支撑柱2的底部设置有支撑底座13,支撑底座13布置在机库1的圆心位置;滑道12使a旋转装置6能沿着支撑柱2循环往复的上下运动,实现机械臂3对四旋翼无人机4放飞、回收操作;所述所述四旋翼无人机4底部设置有外挂模块14,外挂模块14与四旋翼无人机4线路连接,外挂模块14包括壳体15和外挂底板16,外挂底板16通过壳体15与四旋翼无人机4底部连接;外挂模块14实现机械臂3对四旋翼无人机4的定位与捕获;所述充电模块10包括电源盒17,电源盒17上设置有a磁铁18和a电源装置19,a磁铁18设置在a电源装置19的上方,电源盒17的底部设置有a弹簧20,电源盒17的底部通过a弹簧20与隔间9的底面连接;当四旋翼无人机4被放入隔间9时,a磁铁18对四旋翼无人机4进行吸附;电量监控模块11对充电模块10发出充电指令时,a电源装置19对四旋翼无人机4进行充电操作,电量监控模块11对充电模块10发出断电指令时,a磁铁a电源装置19对四旋翼无人机4停止充电;所述壳体15包括b弹簧21、a电磁铁22、b电源装置23和充电接口24,b弹簧21的一端与壳体15连接,b弹簧21的一端与a电磁铁22连接,a电磁铁22与b电源装置23连接,b电源装置23的两端与壳体15连接,b电源装置23布置在充电接口24的上方;当四旋翼无人机4被放入隔间9时,a磁铁18对a电磁铁22进行吸附,a电源装置19与充电接口24连通,并在电量监控模块11对充电模块10发出充电指令时对四旋翼无人机4进行充电,电量监控模块11对充电模块10发出断电指令时充电停止a磁铁;所述外挂底板16中部设置有贯穿的圆孔25,外挂底板16的上表面从下至上依次设置有c弹簧26、b电磁铁27和c电源装置28,外挂底板16的下表面从内到外依次设置有凹陷部29、铜环30和铜片31,c弹簧26的直径大于圆孔25的直径,b电磁铁27的剖面为t字型结构,b电磁铁27的顶部直径大于c弹簧26的
直径,b电磁铁27的底部直径小于圆孔25的直径,b电磁铁27的底部穿设于圆孔25,凹陷部29直径大于b电磁铁27的直径;所述c旋转装置8的底部与b旋转装置7的顶部连接,c旋转装置8包括从内到外依次布置的凸起柱32、旋转部33和外环34,凸起柱32与旋转部33固定连接,旋转部33与外环34活动连接,旋转部33上设置有金属探针35,外环34上设置有金属接片36,凹陷部29的内径与凸起柱32的外径相同,凹陷部29的深度与凸起柱32凸出于旋转部33的高度相同,所述凸起柱32为电磁铁柱;回收四旋翼无人机4时,凸起柱32与凹陷部29连接,金属探针35与铜环30连接,使c旋转装置8与外挂模块14电连通,凸起柱32与b电磁铁27吸附,使b电磁铁27与c电源装置28断开连接,四旋翼无人机4停止运动,旋转部33进行旋转,使金属接片36与铜片31接触,旋转部33停止旋转;所述控制系统5包括定位模块、机械臂控制模块和隔间控制模块;定位模块控制机械臂3的运动方向,定位模块采用超宽带无线通信定位技术,在接收到四旋翼无人机4的定位信息后,机械臂3能准确与四旋翼无人机4进行对接,能准确放飞、回收四旋翼无人机4;隔间控制模块对隔间9的使用情况进行监控,隔间控制模块与机械臂控制模块配合,实现对四旋翼无人机4的储存进行自动化控制;所述a旋转装置6、b旋转装置7和c旋转装置8均为舵机;a旋转装置6为360度可控角度舵机,b旋转装置7为180度可控角度舵机,c旋转装置8为360度连续旋转舵机,能满足机械臂3与四旋翼无人机4使用要求。
36.本实用新型的一种实施例的工作原理:本实用新型在进行回收四旋翼无人机4时,伸展机械臂3,定位模块机械臂3发出定位数据,a旋转装置6根据定位数据,驱动机械臂3旋转至准确位置,使c旋转装置8与外挂模块14对接,凸起柱32与凹陷部29连接,金属探针35与铜环30连接,使c旋转装置8与外挂模块14电连通,凸起柱32与b电磁铁27吸附,使b电磁铁27与c电源装置28断开连接,四旋翼无人机4停止运动,旋转部33进行旋转,使金属接片36与铜片31接触,回缩机械臂3,a旋转装置6驱动机械臂3沿着支撑柱2向下运动,隔间控制模块发出隔间9未使用数据,机械臂3根据隔间9未使用数据,将四旋翼无人机4回收至未使用的隔间9,隔间控制模块记录隔间9的使用信息,a磁铁18对a电磁铁22进行吸附,a电源装置19与充电接口24连通,电量监控模块11对四旋翼无人机4的电量进行监控,电量不足时,电量监控模块11对充电模块10发出充电指令时a磁铁,对四旋翼无人机4进行充电,电量监控模块11对充电模块10发出断电指令时,a电源装置19停止供电a磁铁;在进行放飞四旋翼无人机4时,定位模块与隔间控制模块配合确定需要放飞的四旋翼无人机4,然后对机械臂3发出定位数据,a旋转装置6根据定位数据,驱动机械臂3旋转至准确隔间9,伸展机械臂3,使c旋转装置8与外挂模块14对接,凸起柱32与凹陷部29连接,金属探针35与铜环30连接,使c旋转装置8与外挂模块14电连通,凸起柱32与b电磁铁27吸附,取出需要放飞的四旋翼无人机4,回缩机械臂3,a旋转装置6驱动机械臂3沿着支撑柱2向上运动,隔间控制模块记录隔间9的使用信息,再伸展机械臂3,旋转部33进行旋转,使金属接片36与铜片31断开,凸起柱32与b电磁铁27断开吸附,b电磁铁27与c电源装置28连接,四旋翼无人机4开始运动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1