一种新型物料码垛机器人的制作方法
一种新型物料码垛机器人
1.技术领域:
2.本实用新型涉及物料码垛技术领域,具体涉及一种新型物料码垛机器人。
3.
背景技术:
4.厂房的物料生产完成后,都需要进行码垛,方便后期通过叉车的装车运输,而在对物料进行码垛时,一般都是通过人工进行搬运,而人工进行物料的搬运时,其效率较低,不仅费时费力,也无法保证物料码垛的工整性,对后期物料的装车运输造成影响。
5.在使用码垛装置对物料进行码垛时,虽然能够省去人工搬运的过程,节省了人工成本,但是体积笨重,并且抓取机构抓取物料后,需要进行反复移动和升降才能对物料进行码垛,提高了抓取机构抓取物料后的码垛时间,降低了物料的码垛效率,并且现有的码垛装置结构复杂,造价较高,为企业带来了一定的经济负担。
6.
技术实现要素:
7.针对上述中存在的缺陷和问题,本实用新型提供一种新型物料物料码垛机器人,抓取机构抓取物料时不再需要进行升降,在升降机构与抓取机构的相互配合下,降低了抓取机构抓取物料后的码垛时间,提高了物料的码垛效率,保证了物料码垛的整齐性,降低了人工成本。
8.本实用新型解决其技术问题所采用的方案是:一种新型物料码垛机器人,包括机架,机架底部设有地脚,还包括横向驱动机构、前后驱动机构、抓取机构、升降机构、支撑竖架和支撑横架,在机架内侧设有滑轨,所述支撑竖架设在机架内侧,支撑竖架的外侧设有与滑轨相对应的滑块,滑块滑动套装在滑轨上,所述横向驱动机构设在机架顶部,横向驱动机构包括第三电机和横板,在机架顶部横向设有齿条段二,横板与支撑竖架的外侧固定连接,第三电机固定在横板上方,在第三电机的输出轴上设有驱动齿轮,驱动齿轮与所述齿条段二啮合;所述支撑横架水平固定在支撑竖架内侧,支撑横架的顶部固定有导轨,且支撑横架的内侧面设有齿条段一,所述前后驱动机构包括第一电机、转动齿轮、第二电机、基板和旋转板,所述基板设在支撑横架上方,在基板底部设有导向滑块,基板通过导向滑块与导轨滑动套装,所述第一电机设在基板上方,第一电机的输出轴上固定有驱动齿轮,所述转动齿轮设在基板上方,转动齿轮与第一电机输出轴上的驱动齿轮啮合,在转动齿轮轴心固定有旋转轴,旋转轴转动套装在基板内,且旋转轴底端延伸出基板固定有旋转板,所述抓取机构设在旋转板下方;所述第二电机设在基板上方,第二电机与基板固定,第二电机的输出轴上固定有驱动齿轮,第二电机的输出轴通过驱动齿轮与齿条段一啮合;所述升降机构设在支撑横架下方,升降机构包括液压缸、上板、下板和剪叉,剪叉对称设在上板和下板之间,所述剪叉包括由铰接轴连接的铰接杆一和铰接杆二,在上板的底部分别设有铰接座和轮轨,下板的上方一侧设有固定座,在固定座内固定有第二横杆,铰接杆一的底端与第二横杆铰接,在铰接杆一的顶端设有滑动轮,滑动轮匹配套装在所述轮轨内;所述下板上方的另一侧设有第三横杆,第三横杆底部固定套装有滑动套,铰接杆二的底端与第三横杆固定连接,铰接杆二的顶端与所述铰接座铰接;在对称的铰接杆二之间固定有第一横杆,所述液压缸的底端与第二横杆铰接,液压缸的顶端与第一横杆铰接。
9.进一步的,还包括限位板,在第三横杆外侧的下板上开设有限位槽,限位板限位固定在限位槽内,限位板能够对滑动套进行限位。
10.进一步的,所述抓取机构包括气动抓取架和气动机,气动抓取架固定在基板下方,所述气动机安装在气动抓取架上。
11.进一步的,所述第一电机、第二电机、第三电机、气动机和液压缸分别与控制箱电连接。
12.进一步的,还包括防尘罩,所述防尘罩固定在所述支撑横架上方。
13.进一步的,所述滑轨包括第一滑轨和第二滑轨,第一滑轨固定在机架内侧底部,第二滑轨固定在机架内侧顶部。
14.进一步的,在支撑竖架的内侧和外侧分别设有连接板和固定板,支撑横架通过连接板与支撑竖架固定连接;所述横板和支撑竖架外侧的滑块通过固定板与支撑竖架固定连接。
15.进一步的,所述滑动套为两个,且滑动套为塑胶材质。
16.进一步的,还包括固定架,固定架设在基板上方,固定架的底端与基板连接,所述第一电机固定在固定架上。
17.本实用新型的有益效果:
18.第一,结构独特,使用方便,在升降机构与抓取机构的相互配合下,提高了物料的码垛效率,抓取机构抓取物料时不再需要进行升降,节省了抓取机构抓取物料后的码垛时间,液压缸能够通过剪叉对上板进行升降,抓取机构抓取物料后,液压缸将上板升起,物料直接被抓取机构码垛在上板上,液压缸控制上板由高逐步降低,直至物料被码垛完成。
19.第二,在第三电机的作用下,第三电机输出端的驱动齿轮与齿条段二相互啮合,能够使支撑竖架在机架上横向水平移动,并且在第二电机的作用下,能够使抓取机构在支撑横架内前后移动,第二电机输出轴上的驱动齿轮与齿条段一相互啮合,第二电机运转时,能够带动基板在支撑横架上方的导轨上移动,使用灵活,第一电机运转时,能够带动转动齿轮,从而在旋转轴的作用下带动旋转板旋转,使抓取机构在抓取物料时,能够调整物料的方向,并且在防尘罩的作用下能够防止灰尘进入到导轨内,影响到导轨的正常使用,提高了导轨的使用寿命。
20.第三,气动抓取架通过气动机作为抓取动力,能够将物料抓取更牢固,避免在抓取过程中物料掉落的情况,并且在控制箱内预先输入的程序作用下,控制箱控制第一电机、第二电机、第三电机和气动机,进而实现物料的自动化码垛,使用方便。
21.第四,在限位板的作用下,液压缸控制剪叉使上板下降时,铰接杆二底端滑出下板的情况,限位板能够对滑动套进行限位。
22.附图说明:
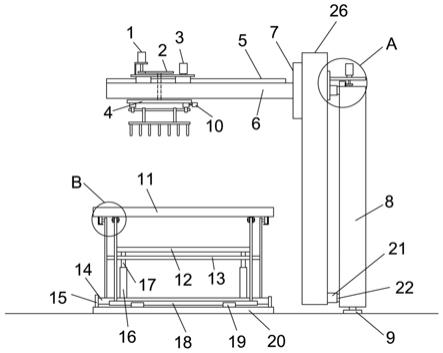
23.图1为本实用新型结构示意图之一。
24.图2为升降机构结构示意图。
25.图3为本实用新型结构示意图之二。
26.图4为图1中a部放大示意图。
27.图5为图1中b部放大示意图。
28.图6为前后驱动机构结构示意图。
29.图7为本实用新型结构示意图之三。
30.图中:1
‑
第一电机,2
‑
转动齿轮,3
‑
第二电机,4
‑
旋转板,5
‑
导轨,6
‑
支撑横架,61
‑
齿条段一,7
‑
连接板,8
‑
机架,9
‑
地脚,10
‑
气动机,11
‑
上板,12
‑
第一横杆,13
‑
铰接轴,14
‑
第二横杆,15
‑
固定座,16
‑
液压缸,17
‑
液压杆,18
‑
第三横杆,19
‑
滑动套,20
‑
下板,21
‑
第一滑块,22
‑
第一滑轨,23
‑
第二滑块,24
‑
第二滑轨,25
‑
固定板,26
‑
支撑竖架,27
‑
齿条段二,28
‑
第三电机,29
‑
横板,30
‑
轮轨,31
‑
滑动轮,32
‑
铰接杆一,33
‑
铰接杆二,34
‑
铰接座,35
‑
限位板,36
‑
限位槽,37
‑
导向滑块,38
‑
固定架,39
‑
基板,40
‑
旋转轴,41
‑
气动抓取架,42
‑
防尘罩。
31.具体实施方式:
32.下面结合附图和实施例对本实用新型进一步说明。
33.实施例1,现有的码垛装置对物料进行码垛时,虽然能够省去人工搬运的过程,节省了人工成本,但是体积笨重,并且抓取机构抓取物料后,需要进行反复移动和升降才能对物料进行码垛,提高了抓取机构抓取物料后的码垛时间,降低了物料的码垛效率。
34.针对上述问题,本实施例提供一种新型物料码垛机器人,如图1
‑
2所示,包括机架8,在机架8的底部固定有地脚9,在机架内侧底部和内侧顶部分别设有第一滑轨22和第二滑轨24,在机架8的内侧设有支撑竖架26,支撑竖架26的外侧底部固定有第一滑块21,第一滑块21套装在第一滑轨22上,在支撑竖架26的外侧顶部固定有固定板25,固定板25上设有第二滑块23,第二滑块23套装在第二滑轨24上,在第二滑块23上方水平设有横板29,横板29与固定板25固定连接,在固定板29上固定安装有第三电机28,第三电机28的输出轴向下且固定有驱动齿轮,机架8的顶部设有齿条段二27,第三电机28输出轴上的驱动齿轮与齿条段二27相互啮合,第三电机28启动时,第三电机28输出轴上的驱动齿轮与齿条段二27做啮合运动,能够使支撑竖架26在机架8上横向水平移动;在支撑竖架26的内侧固定有连接板7,支撑横架6水平设在支撑竖架26内侧,支撑横架6通过连接板7与支撑竖架26固定连接,在支撑横架6的顶部设有导轨5,且支撑横架6的内侧面设有齿条段一61,如图5所示,在支撑横架6的上方设有基板39,基板39的底部固定有导向滑块37,导向滑块37滑动套装在导轨5上,基板39通过导向滑块37可在导轨5上滑动,在基板39上设有固定架38,在固定架38上安装有第一电机1,第一电机1的输出轴向下并安装有驱动齿轮,在基板39上方设有转动齿轮2,转动齿轮2与第一电机1的输出轴上的驱动齿轮啮合,转动齿轮2的轴心固定有旋转轴40,旋转轴40转动套装在基板39内且旋转轴40的底端延伸出基板39,在旋转轴40的底端固定有旋转板4;在基板39的上方设有第二电机3,第二电机3与基板39固定连接,第二电机3的输出轴向下并固定有驱动齿轮,第二电机3的输出轴通过驱动齿轮与齿条段一61啮合,第二电机3运转时,能够带动基板39在支撑横架6上方的导轨5上移动,在旋转板下方设有气动抓取架41,气动抓取架41上安装有气动机10,气动机10能够为气动抓取架41提供抓取动力,第一电机1的输出轴转动通过驱动齿轮带动转动齿轮2进行啮合运动,转动齿轮2带动旋转座40使旋转板4转动,从而使气动抓取架41抓取物料时进行转向。
35.在支撑横架6的下方设有下板20,下板20的上方设有上板11,在下板20与上板11之间对称设有剪叉,剪叉包括由铰接轴13连接的铰接杆一32和铰接杆二33,在上板11右侧底部固定有轮轨30,上板11的左侧底部固定有铰接座34,在下板20左侧上方固定安装有固定座15,固定座15内固定有第二横杆14,铰接杆一32的底端与第二横杆14铰接,在铰接杆一32的顶端安装有滑动轮31,滑动轮31匹配套装在轮轨30内;在下板20右侧上方设有第三横杆
18,在第三横杆18的底部固定套装有滑动套19,滑动套19为两个,且滑动套19为塑胶材质,滑动套19可在下板20上滑动,铰接杆二33的底端与第三横杆18固定连接,铰接杆二33的顶端与铰接座34铰接,在对称的铰接杆二33之间固定有第一横杆12,在第二横杆14上设有液压缸16,液压缸16的底端与第二横杆14铰接,液压缸16内的液压杆17与第一横杆12铰接,液压缸16控制液压杆17伸出时,将第一横杆12向上顶起,使铰接杆一32顶端的滑动轮31在轮轨30内向内移动,使铰接杆二33底端滑动套19在下板20上向内移动,从而将上板11升起;液压缸16控制液压杆17收缩时,将第一横杆12向下移动,使铰接杆一32顶端的滑动轮31在轮轨30内向外移动,使铰接杆二33底端滑动套19在下板20上向外移动,从而将上板11下降。
36.在使用时,该物料码垛机器人正常程序安装调试后,支撑横架6在支撑竖架26上复位,物料通过厂房内的传送装置输送,在传送装置上设有红外线传感器,红外线传感器探测到物料时,便会向控制箱发送信号,控制箱通过程序指令分别向第三电机28、第二电机3和第一电机1发送指令启动,再将气动机10启动,使气动抓取架41抓取物料,液压缸16启动,控制液压杆17伸出,将第一横杆12向上顶起,使铰接杆一32顶端的滑动轮31在轮轨30内向内移动,使铰接杆二33底端滑动套19在下板20上向内移动,从而将上板11升起,气动抓取架41将抓取的物料码垛在上板11上;液压缸16控制液压杆17收缩时,将第一横杆12向下移动,使铰接杆一32顶端的滑动轮31在轮轨30内向外移动,使铰接杆二33底端滑动套19在下板20上向外移动,从而将上板11下降,通过液压缸16控制上板11的高度,从而使上板11根据物料码垛数量由高逐步降低,直至物料被码垛完成,物料码垛完成以后,通过叉车将码垛好的物料从上板11上卸下,提高了物料的码垛效率,气动抓取架41抓取物料时不再需要进行升降,节省了气动抓取架41抓取物料后的码垛时间。
37.实施例2,本实施中的一种新型物料码垛机器人以与实施例1中的不同点为中心进行说明。
38.本实施例中,在第三横杆18外侧的下板20上开设有限位槽36,在限位槽36内卡固有限位板35,限位板35能够对滑动套19进行限位,在限位板35的作用下,能够避免液压缸16控制剪叉使上板11下降时,铰接杆二33底端滑出下板20的情况。
39.实施例3,本实施中的一种新型物料码垛机器人以与实施例1中的不同点为中心进行说明。
40.本实施例中,如图6所示,在支撑横架6上方设有防尘罩42,防尘罩42与支撑横架6固定安装,在防尘罩42的作用下能够防止灰尘进入到导轨5内,影响到导轨5的正常使用,提高了导轨5的使用寿命
41.以上所述仅为本实用新型的较佳实施例,并不限制本实用新型,凡在本实用新型的精神和原则范围内所做的任何修改、等同替换和改进,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1