垃圾桶的制作方法
1.本技术涉及一种垃圾桶。
背景技术:
2.目前,可移动垃圾桶和地埋式垃圾桶通常在桶壁上设置有控制垃圾桶的桶盖开合的脚踏式开关,以避免使用者在倒垃圾时接触桶盖造成二次污染。使用者在扔垃圾时只需踩下脚踏式开关即可自动开启桶盖。脚踏式开关与桶盖的连接方式通常包括直接机械连接、间接机械连接和电气连接。
3.在脚踏式开关与桶盖直接机械连接的情况下,脚踏式开关通过软轴连接到转轴的一侧。桶盖固定到转轴。脚踏式开关通过软轴带动转轴转动,从而实现桶盖的开合动作。这种连接方式的问题在于,桶盖开启速度与脚踏式开关的按压速度成正比,因此通常较快。桶盖没有限位,容易碰到使用者的头部。此外,由于各部件之间的连接缺乏阻尼,桶盖晃动的幅度较大,并且在脚踏式开关不再受到按压时(例如使用者的脚离开脚踏式开关),桶盖会快速关闭,在垃圾桶内产生空气湍流,将质量较轻的垃圾吹出桶外。
4.在脚踏式开关与桶盖间接机械连接的情况下,垃圾桶通常包括双层壳体。脚踏式开关通过软轴连接到转轴的一端。转轴在中间部分固定有转动片。转动片固定到桶盖。桶盖可以沿着长销轴转动。脚踏式开关带动转轴和转动片转动,以将桶盖顶起,使桶盖沿着长销轴转动。这种连接方式的问题在于,双层壳体的结构复杂,因此制造成本较高。传动机构设置在双层壳体之间,不便于检查和维修。
5.在脚踏式开关与桶盖电气连接的情况下,脚踏式开关连接到控制器。控制器控制电机以在脚踏式开关被按压和松开时驱动桶盖执行对应的开合动作。这种连接方式的问题在于,无论是可移动垃圾桶还是地埋式垃圾桶,其工作环境对电子器件而言都较差,电动开启故障率高,导致容易触发误操作,并且控制器在断电的情况下无法使用。
6.相对于传统的可移动垃圾桶,地埋式垃圾桶通常额外设置有电磁致动的锁定装置以在地埋式垃圾桶的垃圾容量接近饱和时将桶盖锁定而防止其被开启。在锁定装置将桶盖锁定后,若桶盖与脚踏式开关之间存在直接或间接的机械连接,则在使用者由于不知情或其他原因而强行按压脚踏式开关的情况下,脚踏式开关与桶盖之间的连接的结构配合间隙会变大,长此以往会使得桶盖在脚踏式开关被按压到最大程度时无法达到最初设计的最大开启角度,或在脚踏式开关未被按压时无法正确关闭。在现有技术中,利用电子器件分别控制脚踏式开关和桶盖是一个可能的解决方案,但这样的解决方案的缺点也如上所述,即,无论是可移动垃圾桶还是地埋式垃圾桶,其工作环境对电子器件而言都较差,电动开启故障率高,导致容易触发误操作,并且控制器在断电的情况下无法使用。
技术实现要素:
7.为了解决上述技术问题,本技术提出了一种垃圾桶,其能够在脚踏式开关与桶盖之间不使用电子器件进行电气连接的情况下将脚踏式开关的致动与桶盖的开合相对隔离,
从而使得在锁定装置将桶盖锁定后,即使使用者由于不知情或其他原因而强行按压脚踏式开关,也不会使脚踏式开关与桶盖之间的连接的结构配合间隙改变。由此,投料机构的使用寿命得以大幅延长,并且与使用电子器件的解决方案相比易于维护且不受断电影响。本技术的垃圾桶可以用作地埋式垃圾桶的一部分或用作传统的露天垃圾桶。
8.本技术公开了一种垃圾桶,包括桶身、桶盖、脚踏式开关和投料机构,其中,桶身包括:外壳;设置在外壳内部的用于容纳垃圾的筒状内壁;以及设置在桶身内侧的靠近顶部位置的锁定装置,其中,桶盖可枢转地设置在桶身顶部,脚踏式开关设置在桶身的侧面,投料机构设置在外壳与筒状内壁之间,其特征在于,投料机构包括:设置在外壳顶部并且充当桶盖的枢转轴的桶盖转轴;一端连接到桶盖且另一端连接到筒状内壁的阻尼机构;以及一端连接到桶盖且另一端连接到脚踏式开关的释放机构。
9.根据可选的实施方式,投料机构包括:连接在释放机构与脚踏式开关之间的第一连接件;以及连接在释放机构与桶盖之间的第二连接件。
10.根据可选的实施方式,释放机构是拉力弹簧,并且构造成在其两端承受的拉力大于临界拉力的情况下伸长,其中,临界拉力大于在桶盖未被锁定的情况下通过第二连接件作用在桶盖上使其打开的力,以及第一连接件和第二连接件是不可伸长的柔性绳索,以传递力并且在桶身中弯折以适应桶身的内部结构。
11.根据可选的实施方式,投料机构包括:连接在释放机构与脚踏式开关之间的第一连接件。
12.根据可选的实施方式,释放机构是扭矩弹簧,其一个扭臂固定到桶盖,另一个扭臂连接到第一连接件,并且构造成在其两端承受的扭矩大于临界扭矩的情况下扭转,其中,临界扭矩大于在桶盖未被锁定的情况下通过释放机构作用在桶盖上使其打开的扭矩,以及第一连接件是不可伸长的柔性绳索,以传递力并且在桶身中弯折以适应桶身的内部结构。
13.根据可选的实施方式,脚踏式开关包括:设置在桶身中的脚踏转轴;可枢转地连接到脚踏转轴的踏板,其中,踏板的一部分延伸到桶身外部;连接在踏板与桶身之间的复位弹簧;以及固定在外壳内侧的限位构件,用于限定踏板的活动范围。
14.根据可选的实施方式,限位构件包括构造成通过旋拧调节位置的限位螺钉。
15.根据可选的实施方式,锁定装置是电磁锁。
16.根据可选的实施方式,桶盖或其一部分由可受磁力影响的材料制成。
17.根据可选的实施方式,桶盖包括:设置在桶盖的外表面上的显示装置,用于显示与桶盖的锁定状态有关的信息;以及设置在桶盖的与桶盖转轴相反的一侧的边缘附近的把手,用于手动提起桶盖。
18.借助于本技术的垃圾桶,脚踏式开关的致动与桶盖的开合之间相对独立,而在脚踏式开关与桶盖之间未使用电子器件进行电气连接,从而使得在锁定装置将桶盖锁定后,即使使用者由于不知情或其他原因而强行按压脚踏式开关,也不会使脚踏式开关与桶盖之间的连接的结构配合间隙改变。由此,投料机构的使用寿命得以大幅延长,并且与使用电子器件的解决方案相比易于维护且不受断电影响。
附图说明
19.现在将参考附图进一步详细描述本技术的实施方式,其中:
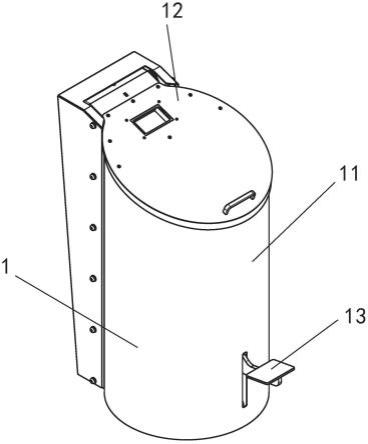
20.图1是根据本技术的垃圾桶的立体图。
21.图2是图1的垃圾桶的剖视图,其中桶盖处于关闭状态并且锁定装置未锁定。
22.图3是图1的垃圾桶的剖视图,其中桶盖处于开启状态并且锁定装置未锁定。
23.图4是图1的垃圾桶的剖视图,其中桶盖处于关闭状态并且锁定装置已锁定。
24.图5是图1的垃圾桶的剖视图,其中桶盖处于开启状态并且锁定装置未锁定,桶盖借助于手提把手被提起。
25.图6是根据本技术的垃圾桶的另一实施方式的剖视图。
具体实施方式
26.在此描述的本技术的实施方式被定义为垃圾桶,其可以在以下描述的实施方式中付诸实践。然而,这些实施方式可以以许多不同的形式示例和实现,并且不限于在此阐述的实施例。本技术不限于所公开的实施方式。相反,提供实施方式的这些说明性实施例,使得本技术将是彻底和完整的。
27.在本技术中,在未作相反说明的情况下,使用的方位词如“上、下、左、右”通常是指参考附图所示的上、下、左、右;“内、外”是指相对于各部件本身的轮廓的内、外。
28.图1是根据本技术的垃圾桶的立体图。垃圾桶1包括桶身11、桶盖12、脚踏式开关13和投料机构14(图中未示出)。
29.图2是图1的垃圾桶的剖视图。桶身11包括:外壳111;设置在外壳内部的用于容纳垃圾的筒状内壁112;以及设置在桶身11内侧的靠近顶部位置的锁定装置113。外壳111具有可拆除的背板,以在需要时拆除,从而暴露外壳111中的部件,便于维护人员修理或更换。桶盖12可枢转地设置在桶身11顶部。脚踏式开关13设置在桶身11的侧面。
30.具体地,在本实施方式中,锁定装置113是电磁锁,其在通电的情况下产生磁力以吸引并固定桶盖12,从而锁定桶盖12,防止其打开。
31.具体地,桶盖12包括:设置在桶盖12的外表面上的显示装置121,用于显示与桶盖12的锁定状态有关的信息;以及设置在桶盖12的与桶盖转轴141相反的一侧的边缘附近的把手122。显示装置121可以包括背光部件,以在黑暗中醒目地显示出相关内容。把手122用于手动提起桶盖12,以在脚踏式开关13出现故障或不方便触及时打开桶盖12。为了能够被由锁定装置113产生的磁力吸引并固定,桶盖12或其一部分由可受磁力影响的材料制成。
32.具体地,投料机构14包括:设置在外壳111顶部并且充当桶盖12的枢转轴的桶盖转轴141;一端连接到桶盖12且另一端连接到筒状内壁112的阻尼机构142;以及一端连接到桶盖12且另一端连接到脚踏式开关13的释放机构143。阻尼机构142连接在桶盖12与桶身11之间,以向桶盖12提供阻尼,使得其在靠近关闭位置时运动阻力变大,运动速度变慢,从而保护桶身11不受桶盖12撞击。避免桶盖12过快关闭的一个优点是,不会在桶身11内部产生空气湍流而将质量较轻的垃圾吹出桶外。释放机构143连接在桶盖12与脚踏式开关13之间,以将脚踏式开关13的按压(踩踏)和释放转换为桶盖12的打开和关闭。阻尼机构142可以是阻尼弹簧或液压阻尼器。
33.具体地,脚踏式开关13包括:设置在桶身11中的脚踏转轴131;可枢转地连接到脚踏转轴131的踏板132,其中,踏板132的一部分延伸到桶身11外部;连接在踏板132与桶身11之间的复位弹簧133;以及固定在外壳111内侧的限位构件134,用于限定踏板132的活动范
围。在踏板132未被踩踏或以其他方式被按压的情况下,其在复位弹簧133和限位构件134的共同作用下处于第一位置,如图2所示。在踏板132被踩踏或以其他方式被按压时,其从第一位置向第二位置枢转并且由于被限位构件134阻挡而停留在第二位置,如图3所示,此时复位弹簧133被拉长。在踏板132上的压力消失后,其借助于复位弹簧133回到第一位置。由于阻尼机构142在长时间处于其极限拉伸状态的情况下容易损坏,因此限位构件134构造成使得在踏板132枢转到第二位置时,阻尼机构142尚未到达其极限拉伸状态。为此,限位构件134包括可以通过旋拧调节位置的限位螺钉。
34.在本实施方式中,投料机构14还包括:连接在释放机构143与踏板132之间的第一连接件144;以及连接在桶盖12的后端与释放机构143之间的第二连接件145。在本实施方式中,第一连接件144和第二连接件145是不可伸长的柔性绳索,以传递力并且可以在桶身11中弯折以适应桶身11的内部结构。
35.在本实施方式中,释放机构143是拉力弹簧,并且构造成在其两端承受的拉力大于临界拉力的情况下伸长。临界拉力大于在桶盖12未被锁定的情况下通过第二连接件145作用在桶盖12上使其打开的力。释放机构143的这种构造的优点是:在桶盖12未被锁定的情况下,不影响脚踏式开关13的按压(踩踏)和释放转换为桶盖12的打开和关闭的过程;而在桶盖12被锁定从而其位置无法改变的情况下,使得脚踏式开关13的按压(踩踏)独立于桶盖12的打开和关闭,即,脚踏式开关13的按压(踩踏)不会将施加在踏板132上力直接传递到桶盖12,而是被释放机构143缓冲和吸收,导致释放机构143伸长,使得最终传递到桶盖12的力仅是维持释放机构143当前长度的力。这样做的优点是,在锁定装置113将桶盖锁定后,即使使用者由于不知情(例如未看到在显示装置121上显示的信息)或其他原因而按压(踩踏)踏板132,也不会使踏板132、桶盖转轴141与桶盖12之间的连接的结构配合间隙改变。由此,投料机构14的使用寿命得以大幅延长,并且与使用电子器件的解决方案相比易于维护且不受断电影响。
36.投料机构14的状态至少包括以下四种,下面以图2-图5为例进行说明。
37.在图2展示的正常关闭状态中,桶盖12处于关闭状态,并且锁定装置113未锁定。此时,阻尼机构142处于收缩状态,释放机构143处于收缩状态,复位弹簧133处于收缩状态。
38.在图3展示的正常开启状态中,桶盖12处于开启状态,并且锁定装置113未锁定。当使用者按压(例如踩下)踏板132时,复位弹簧133被拉伸,从而借助于第一连接件144拉动释放机构143。由于锁定装置113未锁定,因此作用在释放机构143上的拉力小于临界拉力,导致释放机构143保持收缩状态,继而拉动第二连接件145。第二连接件145拉动桶盖12的后端,使得桶盖12沿桶盖转轴141枢转,将桶盖12开启。在桶盖12开启期间,阻尼机构142被拉开。当使用者不再按压踏板132时,例如在使用者的脚离开踏板132后,桶盖12在阻尼机构142和自重的影响下大致匀速地关闭。踏板132在复位弹簧133的收缩作用下回复原状。
39.在图4展示的锁定状态下,桶盖12处于关闭状态并且锁定装置113已锁定。当使用者按压(例如踩下)踏板132时,复位弹簧133被拉伸,从而借助于第一连接件144拉动释放机构143。由于锁定装置113已锁定,因此作用在释放机构143上的拉力会逐渐增大并且最终大于临界拉力,导致释放机构143被拉开。结果,踏板132被顺利踩动,而桶盖12依然处于关闭状态。这样,踏板132的位置改变独立于桶盖12、桶盖转轴141和阻尼机构142,即,踏板132的位置改变不会将力传递到桶盖12、桶盖转轴141和阻尼机构142。这样做的技术效果是,在锁
定装置113将桶盖锁定后,即使使用者由于不知情(例如未看到在显示装置121上显示的信息)或其他原因而按压踏板132,也不会使踏板132、桶盖转轴141与桶盖12之间的连接的结构配合间隙改变。由此,投料机构14的使用寿命得以大幅延长,并且与使用电子器件的解决方案相比易于维护且不受断电影响。
40.在图5展示的手动开启状态中,桶盖12处于开启状态,并且锁定装置113未锁定。当桶盖12例如借助于把手122被手动提起时,阻尼机构142被拉伸。释放机构143在自重的作用下整体下移,并处于收缩状态。踏板132在复位弹簧133的作用下保持不动,因为位移量被第一连接件144吸收。
41.具体地,投料机构14的状态涉及以下力矩:由桶盖12的自重产生的相对于桶盖转轴的力矩ma;由阻尼机构142产生的相对于桶盖转轴141的力矩mb;由释放机构143产生的相对于桶盖转轴141的力矩mc;由锁定装置113产生的相对于桶盖转轴141的力矩md;由复位弹簧133产生的相对于脚踏转轴131的力矩me;由踏板132的自重产生的相对于脚踏转轴131的力矩mf;由踏板132受到按压而产生的相对于脚踏转轴131的力矩mg(变动值)。各力矩之间的关系为:md>mc>ma>mb并且me>mf。在锁定装置113未锁定的情况下,若mc>mg>ma,则桶盖12被正常开启。在锁定装置113已锁定的情况下,若md>mg>mc,则桶盖12在锁定装置113的作用下依然处于关闭状态。当释放机构143承受的拉力超过临界值时,释放机构143被拉开,吸收由踏板132传递的向下位移的量。
42.图6是根据本技术的垃圾桶的另一实施方式的剖视图。与图2的实施方式相比,图6的实施方式的区别在于,投料机构14包括连接在释放机构143与脚踏式开关13之间的第一连接件144。释放机构143是扭矩弹簧,其一个扭臂固定到桶盖12,另一个扭臂连接到第一连接件144,并且构造成在其两端承受的扭矩大于临界扭矩的情况下扭转。临界扭矩大于在桶盖12未被锁定的情况下通过释放机构143作用在桶盖12上使其打开的扭矩。第一连接件144是不可伸长的柔性绳索,以传递力并且在桶身11中弯折以适应桶身11的内部结构。释放机构143的这种构造的优点是:在桶盖12未被锁定的情况下,不影响脚踏式开关13的按压(踩踏)和释放转换为桶盖12的打开和关闭的过程;而在桶盖12被锁定从而其位置无法改变的情况下,使得脚踏式开关13的按压(踩踏)独立于桶盖12的打开和关闭,即,脚踏式开关13的按压(踩踏)不会将施加在踏板132上力直接传递到桶盖12,而是被释放机构143缓冲和吸收,导致释放机构143扭转,使得最终传递到桶盖12的力仅是维持释放机构143当前扭转状态的力。这样做的优点是,在锁定装置113将桶盖锁定后,即使使用者由于不知情(例如未看到在显示装置121上显示的信息)或其他原因而按压(踩踏)踏板132,也不会使踏板132、桶盖转轴141与桶盖12之间的连接的结构配合间隙改变。由此,投料机构14的使用寿命得以大幅延长,并且与使用电子器件的解决方案相比易于维护且不受断电影响。
43.如本文所使用的,术语“和/或”包括一个或多个相关联的所列项目的任何和所有组合。如本文所使用的,术语“或”将被解释为数学或,即包括性的析取;除非另有明确说明,否则不作为数学异或(xor)。另外,单数形式“一个”,“一种”和“该”应被解释为“至少一个”,因此,除非另外明确指出,否则还可能包括多个相同种类的实体。还将理解,术语“包括”和“包含”指定存在所陈述的特征,动作,整体,步骤,操作,元素和/或部件,但是不排除存在或添加一个或多个其他特征,动作,整体,步骤,操作,元素,部件和/或其组。在互不相同的从属权利要求中记载某些措施的事实并不意味着不能有利地使用这些措施的组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1