一种兼容DTRO导流盘和CDRO导流盘的上料设备的制作方法
一种兼容dtro导流盘和cdro导流盘的上料设备
技术领域
1.本发明属于导流盘自动组装设备技术领域,具体涉及到一种兼容dtro导流盘和cdro导流盘的上料设备。
背景技术:
2.dtro是碟管式反渗透膜,cdro是低压平板反渗透膜,两者主要应用于废水或污水浓缩处理领域。导流盘是dtro组件和cdro组件的重要部件,在进行dtro组件和cdro组件组装时,首先需要将导流盘转移至组装设备上,完成导流盘上料,以便进行后续的导流盘组装。但是目前导流盘的上料是采用人工搬运的形式进行,费时费力,且效率低。
3.现有的物料转移多是采用夹取或者吸盘吸取的方式进行物料的转移,吸盘组件通常是通过复杂的机械臂来移动,或者是通过滑轨进行移动,但是吸盘组件通过滑轨进行移动时,只能沿着轨道的方向进行移动,即吸盘的移动方向和滑轨的方向相同,且吸盘之间的距离是不变的。专利cn 110480167 b公开了一种板材激光焊接的上料系统,在抓取待焊接板材时,吸盘之间的间距比较大,而之后抓取成品板材时,需要缩小吸盘之间的间距,通过设置滑动机构以调整吸盘之间的距离。滑动机构包括滑轨、滑座和第三伸缩缸,滑座滑动连接在滑轨上,部分吸盘安装在滑座上;但是吸盘移动的方向与滑座在滑轨上滑动的方向相同,且只有安装在滑座上的吸盘可以移动,从而调节与固定吸盘之间的距离,以实现吸盘之间的距离的改变,吸盘的位置的调节具有一定的限制,适用的物料形状有一定的限制。
4.由于dtro导流盘和cdro导流盘的半径存在差异,无法使用同一种上料设备进行导流盘上料,且多采用人工搬运的方式进行导流盘上料。因此需要研发一种可以兼容dtro导流盘和cdro导流盘的上料设备,以实现dtro导流盘和cdro导流盘自动检测上料。
技术实现要素:
5.为了解决现有的技术问题,本发明提供了一种兼容dtro导流盘和cdro导流盘的上料设备,通过薄型气动手指变距带动吸盘固定板ii移动的同时实现吸盘固定板i移动,通过吸盘固定板ii和吸盘固定板i上的吸盘组件吸取导流盘,实现兼容cdro导流盘和dtro导流盘的上料,操作简单,可一次性吸取6个导流盘进行上料。
6.本发明的技术方案是:一种兼容dtro导流盘和cdro导流盘的上料设备,包括scara机器人、机器人底座、变距机构组件和拆片机器人电磁阀组件;所述scara机器人安装在机器人底座上,变距机构组件安装在scara机器人的前端,拆片机器人电磁阀组件安装在机器人底座的侧面;
7.所述变距机构组件包括变距板、调节板、吸盘固定板i、吸盘固定板ii、直线滑轨、直线滑块、滑块连接板、吸盘连接板、镜像滑块固定板、薄型气动手指、吸盘固定板iii、吸盘组件、凸轮轴承随动器、凸轮随动器固定轴和凸轮随动器套;所述变距板和scara机器人固定连接,所述直线滑轨和薄型气动手指固定在变距板下端,直线滑块滑动连接在直线滑轨上,薄型气动手指的两个夹爪和吸盘固定板iii固定连接,吸盘固定板iii通过吸盘连接板
连接吸盘固定板ii;所述镜像滑块固定板固定在直线滑块的下端,镜像滑块固定板通过滑块连接板连接吸盘固定板i,吸盘固定板ii和吸盘固定板i上固定吸盘组件;所述调节板设置在吸盘固定板iii和吸盘固定板ii之间,以及镜像滑块固定板和吸盘固定板i之间,调节板与吸盘固定板iii固定,调节板与镜像滑块固定板相对应的位置设置导槽;凸轮轴承随动器和凸轮随动器套分别安装在凸轮随动器固定轴的两端,吸盘固定板i的上端和凸轮随动器套固定,凸轮轴承随动器的上端在调节板的导槽中滑动连接。
8.进一步地,所述变距板为类长方形结构,直线滑轨共4个,分布在变距板的4个角位置,且沿长方形对角线设置,所述薄型气动手指设置在变距板的中心位置。
9.进一步地,所述吸盘固定板iii共2个,镜像滑块固定板共4个,沿变距板的长度方向依次设置镜像滑块固定板、吸盘固定板iii和镜像滑块固定板;沿变距板的宽度方向,镜像滑块固定板和吸盘固定板iii均对称设置;薄型气动手指的两个夹爪分别和不同的吸盘固定板iii固定连接。
10.进一步地,所述调节板共2个,沿变距板的长度方向延伸,所述导槽沿变距板的长度方向延伸。
11.进一步地,所述吸盘固定板iii和吸盘固定板ii之间设置2个吸盘连接板,所述镜像滑块固定板和吸盘固定板i之间设置2个滑块连接板,吸盘连接板和滑块连接板设置在调节板的两侧。
12.进一步地,所述吸盘组件包括吸盘、弹簧和导向轴,吸盘设置在下侧,弹簧的两端分别固定连接吸盘和导向轴,导向轴的上部固定安装在吸盘固定板ii或吸盘固定板i上。
13.进一步地,所述吸盘组件在吸盘固定板ii和吸盘固定板i上呈等边三角形分布,吸盘固定板ii为类正方形结构,吸盘固定板i为类梯形结构。吸盘固定板ii为类正方形结构,增加了结构的稳定性和承重,吸盘固定板i为类梯形结构,在保障结构稳定性的同时减轻了结构的自身重量。
14.进一步地,所述兼容dtro导流盘和cdro导流盘的上料设备还包括调速阀、液压缓冲器组件和缓冲限位块;所述调速阀安装在薄型气动手指上,用于控制薄型气动手指的移动速度;所述液压缓冲器组件和缓冲限位块固定安装在吸盘固定板iii上,液压缓冲器组件用于对薄型气动手指的气缸进行缓冲,防止薄型气动手指启动或关闭时抖动太大而使得吸盘组件上吸附的导流盘抖落;缓冲限位块用于对薄型气动手指的夹爪进行缓冲,吸收薄型气动手指夹爪移动的能量,对薄型气动手指的夹爪进行限位。
15.进一步地,所述拆片机器人电磁阀组件包括两位三通单电控电磁阀、阀板、两位五通单电控电磁阀、真空发生器、电子式数显压力开关和固定面板;所述固定面板和机器人底座固定连接,阀板安装固定在固定面板上,阀板一端和气路连接,另一端通过两位三通单电控电磁阀和真空发生器连接,真空发生器分别与电子式数显压力开关和吸盘组件连接,真空发生器用于产生真空,从而使吸盘产生吸力,电子式数显压力开关用于显示吸盘的真空度;所述两位五通单电控电磁阀分别与气路和薄型气动手指连接,用于控制薄型气动手指变距;两位五通单电控电磁阀和两位三通单电控电磁阀均由scara机器人控制。
16.本发明的一种兼容dtro导流盘和cdro导流盘的上料设备的工作方法,具体步骤如下:scara机器人通过两位五通单电控电磁阀控制薄型气动手指进行变距,当薄型气动手指的两个夹爪张开时,带动吸盘固定板iii沿变距板宽度方向向外移动,吸盘固定板iii通过
吸盘连接板带动吸盘固定板ii移动,使得吸盘固定板ii上的吸盘组件沿变距板宽度方向向外移动,同时吸盘固定板iii带动调节板移动,调节板带动凸轮轴承随动器在导槽中向外侧滑动,凸轮轴承随动器沿变距板长度方向向外移动的同时,沿变距板宽度方向向外移动,凸轮轴承随动器通过凸轮随动器固定轴和凸轮随动器套带动吸盘固定板i移动,吸盘固定板i通过滑块连接板和镜像滑块固定板带动直线滑块沿直线滑轨向外移动,从而使得吸盘固定板i沿直线滑轨的方向向外移动,吸盘固定板i带动吸盘组件沿直线滑轨的方向向外移动,与cdro导流盘的型号相适配;当薄型气动手指的两个夹爪闭合时,带动吸盘固定板iii沿变距板宽度方向向内移动,通过吸盘连接板带动吸盘固定板ii移动,使得吸盘固定板ii上的吸盘组件沿变距板宽度方向向内移动,同时吸盘固定板iii带动调节板移动,调节板带动凸轮轴承随动器在导槽中向内侧滑动,凸轮轴承随动器沿变距板长度方向向内移动的同时,沿变距板宽度方向向内移动,凸轮轴承随动器通过凸轮随动器固定轴和凸轮随动器套带动吸盘固定板i移动,吸盘固定板i通过滑块连接板和镜像滑块固定板带动直线滑块沿直线滑轨向内移动,从而使得吸盘固定板i沿直线滑轨的方向向内移动,吸盘固定板i带动吸盘组件沿直线滑轨的方向向内移动,与dtro导流盘的型号相适配;scara机器人通过两位三通单电控电磁阀控制真空发生器产生真空,从而使吸盘产生吸力,将cdro导流盘或dtro导流盘吸取,变距机构组件一次性吸取6个导流盘,每个吸盘固定板ii和吸盘固定板i上的吸盘组件分别吸取1个导流盘,scara机器人将变距机构组件移动至皮带线上方,控制真空发生器取消真空,将6个导流盘放下,完成导流盘的上料。
17.当调节板沿变距板的长度方向向外移动时,对凸轮轴承随动器产生沿变距板长度方向向外的力,凸轮轴承随动器将力依次传递给吸盘固定板i、滑块连接板、镜像滑块固定板和直线滑块,使得直线滑块沿直线滑轨向外移动,同时,直线滑块将力依次传递给镜像滑块固定板、滑块连接板、吸盘固定板i、凸轮随动器套、凸轮随动器固定轴和凸轮轴承随动器,使得凸轮轴承随动器在导槽中向外侧滑动,实现凸轮轴承随动器沿变距板长度方向向外移动的同时,沿变距板宽度方向向外移动,即凸轮轴承随动器在导槽中向外侧滑动的同时,沿变距板宽度方向向外移动,与此同时,吸盘固定板i、滑块连接板、镜像滑块固定板和直线滑块沿直线滑轨方向向外移动。
18.采用上述技术方案,本发明实现的有益效果如下:
19.(1)本发明通过薄型气动手指变距带动吸盘固定板ii移动的同时实现吸盘固定板i移动,通过吸盘固定板ii和吸盘固定板i上的吸盘组件吸取导流盘,实现兼容cdro导流盘和dtro导流盘的上料,操作简单,可一次性吸取6个导流盘进行上料,上料效率高,占用空间小。
20.(2)通过调节板、凸轮轴承随动器、导槽、直线滑轨和直线滑块相互作用,实现调节板沿变距板宽度方向移动的同时,吸盘固定板i沿直线滑轨的方向进行移动,从而通过薄型气动手指变距,实现吸盘固定板ii和吸盘固定板i同时移动,结构稳定,能耗低,故障率低。
21.(3)通过拆片机器人电磁阀组件和scara机器人控制导流盘自动上料,准确率高,节拍可以达到1s/片。
22.(4)通过调速阀、液压缓冲器组件和缓冲限位块对薄型气动手指的动作进行速度调整和缓冲,通过弹簧对吸盘进行缓冲,防止导流盘从吸盘上掉落,保证上料的稳定性。
附图说明
23.图1为本发明的结构示意图;
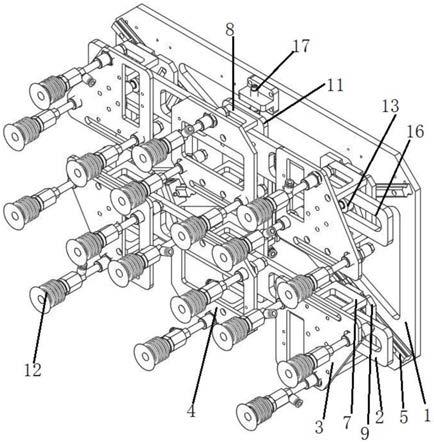
24.图2为变距机构组件的结构示意图;
25.图3为变距机构组件的主视图;
26.图4为变距机构组件的仰视图;
27.图5为变距机构组件的侧视图;
28.图6为变距机构组件中直线滑轨、直线滑块和镜像滑块固定板的结构示意图;
29.图7为变距板和直线滑轨的结构示意图;
30.图8为凸轮轴承随动器的结构示意图;
31.图9为调速阀、液压缓冲器组件和缓冲限位块的结构示意图;
32.图10为拆片机器人电磁阀组件的结构示意图。
33.图中,变距板1、调节板2、吸盘固定板i 3、吸盘固定板ii 4、直线滑轨5、直线滑块6、滑块连接板7、吸盘连接板8、镜像滑块固定板9、薄型气动手指10、吸盘固定板iii 11、吸盘组件12、凸轮轴承随动器13、凸轮随动器固定轴14、凸轮随动器套15、导槽16、调速阀17、液压缓冲器组件18、缓冲限位块19、scara机器人20、机器人底座21、变距机构组件22、拆片机器人电磁阀组件23、吸盘121、弹簧122、导向轴123、两位三通单电控电磁阀231、阀板232、两位五通单电控电磁阀233、真空发生器234、电子式数显压力开关235、固定面板236。
具体实施方式
34.下面结合附图和具体实施方式对本发明作进一步详细的说明。
35.实施例1
36.参照图1-10中,一种兼容dtro导流盘和cdro导流盘的上料设备,包括scara机器人20、机器人底座21、变距机构组件22和拆片机器人电磁阀组件23;所述scara机器人20安装在机器人底座21上,变距机构组件22安装在scara机器人20的前端,拆片机器人电磁阀组件23安装在机器人底座21的侧面;
37.所述变距机构组件22包括变距板1、调节板2、吸盘固定板i 3、吸盘固定板ii 4、直线滑轨5、直线滑块6、滑块连接板7、吸盘连接板8、镜像滑块固定板9、薄型气动手指10、吸盘固定板iii 11、吸盘组件12、凸轮轴承随动器13、凸轮随动器固定轴14和凸轮随动器套15;所述变距板1和scara机器人20固定连接,所述直线滑轨5和薄型气动手指10固定在变距板1下端,直线滑块6滑动连接在直线滑轨5上,薄型气动手指10的两个夹爪和吸盘固定板iii 11固定连接,吸盘固定板iii 11通过吸盘连接板8连接吸盘固定板ii 4;所述镜像滑块固定板9固定在直线滑块6的下端,镜像滑块固定板9通过滑块连接板7连接吸盘固定板i 3,吸盘固定板ii 4和吸盘固定板i 3上固定吸盘组件12;所述调节板2设置在吸盘固定板iii 11和吸盘固定板ii 4之间,以及镜像滑块固定板9和吸盘固定板i 3之间,调节板2与吸盘固定板iii 11固定,调节板2与镜像滑块固定板9相对应的位置设置导槽16;凸轮轴承随动器13和凸轮随动器套15分别安装在凸轮随动器固定轴14的两端,吸盘固定板i 3的上端和凸轮随动器套15固定,凸轮轴承随动器13的上端在调节板2的导槽16中滑动连接。
38.进一步地,所述变距板1为类长方形结构,直线滑轨5共4个,分布在变距板1的4个角位置,且沿长方形对角线设置,所述薄型气动手指10设置在变距板1的中心位置。
39.进一步地,所述吸盘固定板iii 11共2个,镜像滑块固定板9共4个,沿变距板1的长度方向依次设置镜像滑块固定板9、吸盘固定板iii 11和镜像滑块固定板9;沿变距板1的宽度方向,镜像滑块固定板9和吸盘固定板iii 11均对称设置;薄型气动手指10的两个夹爪分别和不同的吸盘固定板iii 11固定连接。
40.进一步地,所述调节板2共2个,沿变距板1的长度方向延伸,所述导槽16沿变距板1的长度方向延伸。
41.进一步地,所述吸盘固定板iii 11和吸盘固定板ii 4之间设置2个吸盘连接板8,所述镜像滑块固定板9和吸盘固定板i 3之间设置2个滑块连接板7,吸盘连接板8和滑块连接板7设置在调节板2的两侧。
42.进一步地,所述吸盘组件12包括吸盘121、弹簧122和导向轴123,吸盘121设置在下侧,弹簧122的两端分别固定连接吸盘121和导向轴123,导向轴123的上部固定安装在吸盘固定板ii 4或吸盘固定板i 3上。
43.进一步地,所述吸盘组件12在吸盘固定板ii 4和吸盘固定板i 3上呈等边三角形分布,吸盘固定板ii 4为类正方形结构,吸盘固定板i 3为类梯形结构。
44.进一步地,所述兼容dtro导流盘和cdro导流盘的上料设备还包括调速阀17、液压缓冲器组件18和缓冲限位块19;所述调速阀17安装在薄型气动手指10上,用于控制薄型气动手指10的移动速度;所述液压缓冲器组件18和缓冲限位块19固定安装在吸盘固定板iii 11上,液压缓冲器组件18用于对薄型气动手指10的气缸进行缓冲,防止薄型气动手指10启动或关闭时抖动太大而使得吸盘组件12上吸附的导流盘抖落;缓冲限位块19用于对薄型气动手指10的夹爪进行缓冲,吸收薄型气动手指10夹爪移动的能量,对薄型气动手指10的夹爪进行限位。
45.进一步地,所述拆片机器人电磁阀组件23包括两位三通单电控电磁阀231、阀板232、两位五通单电控电磁阀233、真空发生器234、电子式数显压力开关235和固定面板236;所述固定面板236和机器人底座21固定连接,阀板232安装固定在固定面板236上,阀板232一端和气路连接,另一端通过两位三通单电控电磁阀231和真空发生器234连接,真空发生器234分别与电子式数显压力开关235和吸盘组件12连接,真空发生器234用于产生真空,从而使吸盘121产生吸力,电子式数显压力开关235用于显示吸盘121的真空度;所述两位五通单电控电磁阀233分别与气路和薄型气动手指10连接,用于控制薄型气动手指10变距;两位五通单电控电磁阀233和两位三通单电控电磁阀231均由scara机器人20控制。
46.进一步地,所述凸轮轴承随动器13为聚氨酯包覆型。
47.进一步地,所述吸盘固定板iii 11和镜像滑块固定板9处于同一高度,所述吸盘固定板ii 4和吸盘固定板i 3处于同一高度,所述吸盘组件12处于同一高度。
48.本实施例1的一种兼容dtro导流盘和cdro导流盘的上料设备的工作方法,具体步骤如下:scara机器人20通过两位五通单电控电磁阀233控制薄型气动手指10进行变距,当薄型气动手指10的两个夹爪张开时,带动吸盘固定板iii 11沿变距板1宽度方向向外移动,吸盘固定板iii 11通过吸盘连接板8带动吸盘固定板ii 4移动,同时吸盘固定板iii 11带动调节板2移动,调节板2带动凸轮轴承随动器13在导槽16中向外侧滑动,凸轮轴承随动器13沿变距板1长度方向向外移动的同时,沿变距板1宽度方向向外移动,凸轮轴承随动器13通过凸轮随动器固定轴14和凸轮随动器套15带动吸盘固定板i 3移动,吸盘固定板i 3通过
滑块连接板7和镜像滑块固定板9带动直线滑块6沿直线滑轨5向外移动,从而使得吸盘固定板i 3沿直线滑轨5的方向向外移动,吸盘固定板i 3带动吸盘组件12沿直线滑轨5的方向向外移动,与cdro导流盘的型号相适配;当薄型气动手指10的两个夹爪闭合时,带动吸盘固定板iii 11沿变距板1宽度方向向内移动,通过吸盘连接板8带动吸盘固定板ii 4移动,同时吸盘固定板iii 11带动调节板2移动,调节板2带动凸轮轴承随动器13在导槽16中向内侧滑动,凸轮轴承随动器13沿变距板1长度方向向内移动的同时,沿变距板1宽度方向向内移动,凸轮轴承随动器13通过凸轮随动器固定轴14和凸轮随动器套15带动吸盘固定板i 3移动,吸盘固定板i 3通过滑块连接板7和镜像滑块固定板9带动直线滑块6沿直线滑轨5向内移动,从而使得吸盘固定板i 3沿直线滑轨5的方向向内移动,吸盘固定板i 3带动吸盘组件12沿直线滑轨5的方向向内移动,与dtro导流盘的型号相适配;scara机器人20通过两位三通单电控电磁阀231控制真空发生器234产生真空,从而使吸盘121产生吸力,将cdro导流盘或dtro导流盘吸取,变距机构组件22一次性吸取6个导流盘,每个吸盘固定板ii 4和吸盘固定板i 3上的吸盘组件12分别吸取1个导流盘,scara机器人20将变距机构组件22移动至皮带线上方,控制真空发生器234取消真空,将6个导流盘放下,完成导流盘的上料。
49.导流盘箱体经过箱体输送线运输至导流盘上料的工位后,通过箱体定位装置将箱体定位至变距机构组件22的下方,然后再通过兼容dtro导流盘和cdro导流盘的上料设备进行导流盘的上料,其中箱体输送线和箱体定位装置为现有技术。scara机器人20将变距机构组件22移动至皮带线上方,将导流盘放下完成上料后,皮带线将导流盘输送进行后续处理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1