升降平台、控制方法及应用与流程
1.本发明涉及电磁屏蔽门技术领域,特别涉及一种可应用于电磁屏蔽门上的升降平台、控制方法及应用。
背景技术:
2.电磁屏蔽室是电磁兼容(emc)领域的重要内容,电磁屏蔽室就是一个钢板房子,冷轧钢板是其主体屏蔽材料。包括六面壳体、门、窗等一般房屋要素,只是要求严密的电磁密封性能,并对所有进出管线作相应屏蔽处理,进而阻断电磁辐射出入。
3.如图1,电磁屏蔽门正是电磁屏蔽室出入的通道,为保证电磁屏蔽们的可靠性,一般在安装时,在电磁屏蔽室设置电磁屏蔽门的位置上设置门槛,该门槛与电磁屏蔽门配合,使电磁屏蔽门在关闭时能够起到屏蔽作用,满足电磁密封性能要求。
4.但是,在设置上述的门槛后,如果需要向电磁屏蔽室内搬运设备,门槛就成为运输的主要阻碍,对运送的设备构成危险。
5.一种能够自由控制的升降平台亟待研发。
技术实现要素:
6.为了解决现有技术的不足,本发明提供一种升降平台、控制方法及应用,用于至少解决背景技术中的一个技术问题。
7.本发明所采用的技术方案是:
8.一种升降平台,包括:
9.平台本体;
10.升降组件,设置在平台本体下方,用于为所述平台本体的升降提供动力;
11.锁紧组件,与所述平台本体接触,用于向所述平台本体施力以防止所述平台本体发生跳动。
12.所述升降组件,包括:
13.驱动电机;
14.蜗轮丝杆机构,与所述驱动电机连接,用于驱动所述蜗轮丝杆机构;
15.驱动件,设置在所述蜗轮丝杆机构上,用于通过蜗轮丝杆机构实现上下移动;
16.所述驱动件与所述平台本体可拆卸的连接。
17.所述升降组件,还包括:
18.手动摇杆,与所述蜗轮丝杆机构连接,用于在停电时控制所述平台本体的升降。
19.所述锁紧组件,包括:
20.弹簧,一端与所述平台本体连接,另一端与地面连接。
21.所述锁紧组件,包括:
22.锁紧电机,设置在地面上;
23.连接件,设置在所述锁紧电机的输出端;
24.锁紧件,设置在所述连接件上,用于随所述连接件转动;
25.传感器,设置在指定位置,用于采集所述平台本体的到位信息;
26.控制单元,与所述传感器电性连接,用于根据所述传感器的信号控制所述锁紧电机转动;
27.所述锁紧件远离所述连接件的一端与所述平台本体的下沿接触,用于控制所述平台本体的位移。
28.所述锁紧件,包括:
29.连接部,设置在所述连接件的外侧;
30.延伸部,设置在所述连接部的周向;
31.所述延伸部与所述平台本体的下沿接触。
32.所述延伸部与所述平台本体下沿接触的平面为斜面。
33.所述斜面的夹角为10~25
°
。
34.所述延伸部与所述平台本体下沿接触的平面为朝向所述平台本体的凸起面。
35.一种升降平台的控制方法,包括:
36.通过锁紧组件中的传感器持续采集平台本体的位置信息,并在所述平台本体到达指定位置后发出到位信号;
37.控制单元根据所述到位信号控制锁紧电机开始工作;
38.所述锁紧电机带动所述锁紧件转动指定角度,从而将平台本体固定在所述指定位置。
39.本发明的有益效果是:
40.本发明所述的升降平台,能够在平台本体抬升到指定位置后,通过锁紧组件锁紧平台本体的位置,防止平台本体发生上下跳动,保证运送设备时的安全可靠;
41.本发明所述的控制方法,通过持续采集平台本体的位置信息,判断平台本体的位置,在平台本体到达指定位置后发出到位信号;并且,通过锁紧电机带动所述锁紧件转动指定角度,使锁紧件锁紧平台本体,防止平台本体发生跳动;本发明所述的控制方法流程简单,实现容易,特别适合电磁屏蔽室的使用。
附图说明
42.图1为现有电磁屏蔽室的结构示意图;
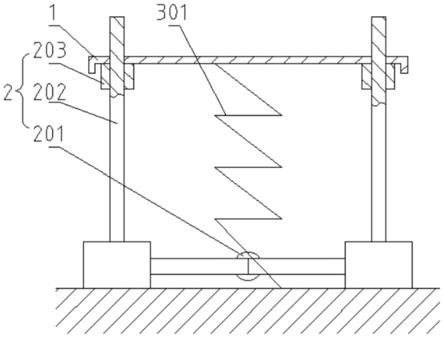
43.图2为本发明所述的升降平台的一种实施例;
44.图3为本发明所述的升降平台的另一种实施例;
45.图4为图3中的锁紧件的主视图;
46.图5为图4中锁紧件的一种实施例;
47.图6为图4中锁紧件的另一种实施例;
48.图7为本发明所述的升降平台的再一种实施例;
49.图8为本发明所述升降平台的使用示意图。
具体实施方式
50.现对现有的两种无人机控制方案进行说明:
51.如图1,代表的是现有技术中电磁屏蔽室的常见结构;在a处的门槛一般设置为两处,两个门槛之间的空间作为走廊使用;b处的屏蔽门与一个门槛进行配合,实现对电磁屏蔽室的屏蔽;对于图一的结构而言,如果要运送一些吨级的实验设备,门槛就成为一个较为难解决的问题。
52.本发明以电磁屏蔽室为例,提供一种实施例:
53.本发明提供一种升降平台,包括:平台本体1、升降组件2以及锁紧组件3;升降组件2设置在平台本体1下方,用于为所述平台本体1的升降提供动力;锁紧组件3与所述平台本体1接触,用于向所述平台本体1施力以防止所述平台本体1发生跳动;当平台本体1填充了a处两个门槛之间的低洼地带,形成一个平面,方便运送实验设备。
54.具体的,所述升降组件2,包括:驱动电机201、蜗轮丝杆机构202、驱动件203;其中,蜗轮丝杆机构202与所述驱动电机201连接,用于驱动所述蜗轮丝杆机构202;驱动件203设置在所述蜗轮丝杆机构202上,用于通过蜗轮丝杆机构202实现上下移动;所述驱动件203与所述平台本体1可拆卸的连接;为了方便手动,或满足在特殊情况,还设置有手动摇杆204,与所述蜗轮丝杆机构202连接,用于在停电时控制所述平台本体1的升降;所述的驱动件203可以是带有内丝的工件;其端部与平台本体1通过螺丝等连接;蜗轮丝杆机构202、驱动件203可以配套设置多个,以平台本体1的升降平稳为准。
55.本发明提供一种实施例:
56.如图2,所述锁紧组件3,包括:弹簧301,一端与所述平台本体1连接,另一端与地面连接;通过弹簧301拉持平台本体1,使平台本体1始终保持向地面的力,再平台本体1到达指定位置后,弹簧301被充分拉伸,平台本体1同时受到驱动件203向上的顶起力和弹簧301的向下的拉力,无法形成跳动,形成稳定结构。
57.本发明还提供一种实施例:
58.如图3,所述锁紧组件3,包括:锁紧电机302、连接件303、锁紧件304、传感器305以及控制单元306;其中,锁紧电机302,设置在地面上;连接件303设置在所述锁紧电机302的输出端;锁紧件304设置在所述连接件303上,用于随所述连接件303转动;传感器305设置在指定位置,用于采集所述平台本体1的到位信息;控制单元306与所述传感器305电性连接,用于根据所述传感器305的信号控制所述锁紧电机302转动;所述锁紧件304远离所述连接件303的一端与所述平台本体1的下沿接触,用于控制所述平台本体1的位移。
59.在本实施例中,通过传感器305采集平台本体1的到位信息,然后根据平台本体1的位置作为信号,控制单元306控制锁紧电机302转动,利用锁紧件304将平台本体1的位置锁定;优选的,锁紧件304设置在平台本体1的下方,与驱动件203同时提供向上的顶起力,主要是由于电磁屏蔽室内需要的实验设备一般都比较重,对于带有内丝的驱动件203,其丝扣结构容易在过重的设备经过时损坏,所以,采用锁紧件304、驱动件203同时托举的方式,提升可靠性;而平台本体1较重,可由其自重控制其不会发生向上的跳动。
60.当然,为了增加可靠性,还可以将上述的两个实施例进行组合,如图7,将弹簧301设置在平台本体1与地面之间;对平台本体1形成:由弹簧301提供的拉力,由锁紧件304、驱动件203同时提供向上的顶起力的方式。
61.对于锁紧件,本发明提供一种实施例:
62.如图4,如图所述锁紧件304,包括:连接部3041和延伸部3042;其中,连接部3041设
置在所述连接件303的外侧;延伸部3042设置在所述连接部3041的周向;所述延伸部3042与所述平台本体1的下沿接触;连接部3041与连接件303通过销轴连接,保证同步转动。
63.如图5,为了减小延伸部3042与平台本体1的下沿接触时的阻力,所述延伸部3042与所述平台本体1下沿接触的平面为斜面,方便延伸部3042的旋入和旋出;优选的,所述斜面的夹角α为10~25
°
。
64.同样的,如图6,所述延伸部3042与所述平台本体1下沿接触的平面为朝向所述平台本体1的凸起面,方便延伸部3042的旋入和旋出;优选的,所述凸起面为弧形面。
65.本发明提供一种实施例:
66.如图8,在使用上述实施例中所述的升降平台时,需要先在两个门槛a之间向下挖取一个空间,将上述实施例中所述的升降平台防止在这个空间中;通过锁紧组件3中的传感器305持续采集平台本体1的位置信息,并在升降平台中的平台本体1行至最高点时发出到位信号;控制单元306根据所述到位信号控制锁紧电机302开始工作;所述锁紧电机302带动所述锁紧件304转动指定角度,从而将平台本体1固定,平台本体1刚好位于两个门槛a平齐位置,虽然平台本体1与门槛之间存在一定的缝隙,但是不影响使用,保证了本发明使用的可靠性。尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1