一种智能双向可逆刀片摆盘机的制作方法
1.本实用新型涉及机械领域,特别涉及一种智能双向可逆刀片摆盘机。
背景技术:
2.在冶金行业中,刀片进涂层炉之前要先放置在指定的治具中,然后才能送入涂层炉处理,刀片经过涂层后又要从治具中拿出放置到成品料盘中,目前这些操作均采用人工手工操作完成,工人劳动强度大,生产效率低下。
技术实现要素:
3.本实用新型目的在于解决现有技术的问题,提供一种能够实现刀片自动摆盘的智能双向可逆摆盘机。
4.本实用新型的技术方案:一种智能双向可逆刀片摆盘机,其特征在于:包括刀片送料机构、双动子抓料机构、进料盘机构、料库系统、刀片翻转机构、视觉检测机构;所述刀片送料机构设置在机器的最前端;所述刀片翻转机构平行放置于所述刀片送料机构一侧;所述进料盘机构平行放置于所述刀片翻转机构一侧;所述双动子抓料机构设置于所述刀片送料机构、刀片翻转机构、进料盘机构的上方;所述视觉检测机构设置于所述双动子抓料机构的侧上方。
5.进一步,所述刀片送料机构包括机架ⅰ、落料盘机构、运料盘装置、料盘顶起装置ⅰ、料盘托架ⅰ;所述落料盘机构安装在所述机架ⅰ上,包括料盘托架ⅱ、落料执行机构;所述料盘托架ⅱ上放置料盘;所述落料执行机构位于所述料盘托架ⅱ两侧用于托住料盘并逐个放送料盘;所述落料执行机构包括气缸ⅱ、托脚,托脚由所述气缸ⅱ驱动做直线反复运动;所述运料盘装置位于所述落料盘机构的下方,包括线轨ⅰ、滑台ⅰ;所述滑台ⅰ安装在所述线轨ⅰ上,在电机ⅰ的驱动下沿线轨ⅰ往复运动;所述滑台ⅰ上设置料盘托板ⅰ;所述料盘托板ⅰ的下方安装推杆机构;所述推杆机构包含推杆气缸、推杆;所述推杆气缸驱动推杆推动料盘托板ⅰ做上下运动;所述料盘托板ⅰ上还设置夹盘装置;所述夹盘装置包括固定夹块、活动夹块、夹块气缸;所述固定夹块、活动夹块分别安装在所述料盘托板ⅰ上,位于料盘托板ⅰ的两端;所述夹块气缸安装在所述料盘托板ⅰ的底面上,驱动活动夹块动作;所述料盘顶起装置ⅰ安装在所述线轨ⅰ的末端,包括若干顶起杆ⅰ、顶起气缸ⅰ;所述顶起杆ⅰ由所述顶起气缸ⅰ驱动作上下直线运动;所述料盘托架ⅰ安装在所述机架ⅰ上,位于所述料盘顶起装置ⅰ的正上方;所述料盘托架ⅰ上设置若干单向托脚ⅰ。
6.进一步,所述落料盘机构下方安装料盘顶起装置ⅱ;所述料盘顶起装置ⅱ与所述料盘顶起装置ⅰ结构相同。
7.进一步,所述双动子抓料机构包括机架ⅱ、线轨ⅱ、抓料机械手ⅱ、抓料机械手ⅲ;所述线轨ⅱ安装在所述机架ⅱ上;所述抓料机械手ⅱ使用滑块ⅱ安装在所述线轨ⅱ上;所述抓料机械手ⅲ使用滑块ⅲ安装在所述线轨ⅱ上;所述抓料机械手ⅱ在电机ⅱ的驱动下沿所述线轨ⅱ来回运动;所述抓料机械手ⅲ在电机ⅲ的驱动下沿所述线轨ⅱ来回运动;所述
抓料机械手ⅱ与抓料机械手ⅲ结构一样;所述抓料机械手ⅱ包含若干驱动电机,每个驱动电机连接一个抓料杆;所述抓料杆末端连接吸盘。
8.进一步,所述视觉检测机构包括线轨ⅲ、视觉检测装置ⅰ、视觉检测装置ⅱ;所述视觉检测装置ⅰ与视觉检测装置ⅱ分别使用滑块安装在所述线轨ⅲ上;所述视觉检测装置ⅰ在电机ⅳ的驱动下沿所述线轨ⅲ来回运动;所述视觉检测装置ⅱ在电机
ⅴ
的驱动下沿所述线轨ⅲ来回运动。
9.进一步,所述刀片翻转机构包括线轨ⅳ、支架、基板、刀片放置板、气缸ⅲ、推板、摆动电机;所述支架安装在所述线轨ⅳ上,在电机
ⅵ
的驱动下沿线轨ⅳ来回移动;所述基板使用翻转轴安装在所述支架上;所述翻转轴的末端连接所述摆动电机;所述摆动电机安装在所述支架上,驱动翻转轴带动基板转动;所述基板前段上安装刀片放置板,刀片放置板前部开设若干刀片放置槽;所述刀片放置板上方安装一推板;所述推板由所述气缸ⅲ驱动做直线运动;所述气缸ⅲ安装在所述基板上。
10.进一步,所述进料盘机构包括滑台ⅱ、滑架、机架ⅲ;所述机架ⅲ底面上安装两组滑轨,分别为滑轨ⅰ、滑轨ⅱ;所述滑台ⅱ安装在所述滑轨ⅰ上,在驱动电机ⅰ的驱动下,皮带ⅰ的传动下沿滑轨ⅰ来回运动;所述滑架安装在所述滑轨ⅱ上,在驱动电机ⅱ的驱动下,皮带ⅱ的传动下沿滑轨ⅱ来回运动;所述滑台ⅱ上设置料盘顶盘;所述料盘顶盘在顶起气缸ⅱ的作用下上下移动。
11.进一步,所述料库系统包括机架ⅳ、升降装置;所述升降装置安装在所述机架ⅳ上;所述升降装置包括升降电机、丝杆、导向杆、料仓;所述料仓在所述升降电机驱动,丝杆传动下,沿所述导向杆上下运动;所述料仓由底板、边板、上盖板组成;所述边板设有两个;所述边板上设有若干托脚ⅱ。
12.本实用新型的有益效果:本实用新型实现了刀片的自动摆盘作业,大大提高了劳动生产率,减少了用工数量,增加了企业经济效益。
附图说明
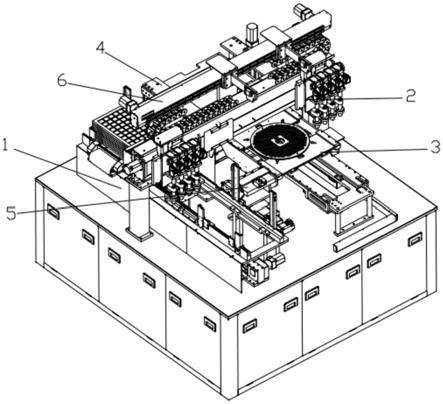
13.图1为本实用新型立体图;图2为本实用新型刀片送料机构立体图;图3为本实用新型刀片翻转机构立体图;图4为本实用新型刀片翻转机构另一角度立体图;图5为本实用新型双动子抓料机构立体图;图6为本实用新型视觉检测机构立体图;图7为本实用新型进料盘机构立体图;图8为本实用新型料库系统立体图;图9为本实用新型刀片送料机构局部组成结构立体图;图10位本实用新型滑台ⅰ立体图;图11位本实用新型滑台ⅰ平面图;图12位本实用新型顶起装置ⅰ、顶起装置ⅱ立体图;图13位本实用新型进料盘机构另一角度立体图;图14位本实用新型带冶具的滑架立体图。
具体实施例
14.如图所示:一种智能双向可逆刀片摆盘机,其特征在于:包括刀片送料机构1、双动子抓料机构2、进料盘机构3、料库系统4、刀片翻转机构5、视觉检测机构6;所述刀片送料机构1设置在机器的最前端;所述刀片翻转机构5平行放置于所述刀片送料机构1一侧;所述进料盘机构3平行放置于所述刀片翻转机构1一侧;所述双动子抓料机构2设置于所述刀片送料机构1、刀片翻转机构5、进料盘机构3的上方;所述视觉检测机构5设置于所述双动子抓料
机构2的侧上方。
15.所述刀片送料机构1包括机架ⅰ11、落料盘机构12、运料盘装置13、料盘顶起装置ⅰ14、料盘托架ⅰ15;所述落料盘机构12安装在所述机架ⅰ11上,包括料盘托架ⅱ121、落料执行机构122;所述料盘托架ⅱ121上放置料盘16;所述落料执行机构122位于所述料盘托架ⅱ121两侧用于托住料盘并逐个放送料盘;所述落料执行机构122包括气缸ⅱ1221、托脚1222,托脚1222由所述气缸ⅱ1221驱动做直线反复运动;所述运料盘装置13位于所述落料盘机构12的下方,包括线轨ⅰ131、滑台ⅰ132;所述滑台ⅰ132安装在所述线轨ⅰ131上,在电机ⅰ(图中未示出)的驱动下沿线轨ⅰ132往复运动;所述滑台ⅰ132上设置料盘托板ⅰ133;所述料盘托板ⅰ133地下方安装推杆机构134;所述推杆机构134包含推杆气缸1341、推杆1342;所述推杆气缸1341驱动推杆1342推动料盘托板ⅰ133做上下运动;所述料盘托板ⅰ133上还设置夹盘装置135;所述夹盘装置135包括固定夹块1351、活动夹块1352、夹块气缸1353;所述固定夹块1351、活动夹块1352分别安装在所述料盘托板ⅰ133上,位于料盘托板ⅰ133的两端;所述夹块气缸1353安装在所述料盘托板ⅰ133的底面上,驱动活动夹块1352动作;所述料盘顶起装置ⅰ14安装在所述线轨ⅰ131的末端,包括若干顶起杆ⅰ141、顶起气缸ⅰ142;所述顶起杆ⅰ141由所述顶起气缸ⅰ142驱动作上下直线运动;所述料盘托架ⅰ15安装在所述机架ⅰ11上,位于所述料盘顶起装置ⅰ14的正上方;所述料盘托架ⅰ15上设置若干单向托脚ⅰ151。
16.所述落料盘机构12下方安装料盘顶起装置ⅱ17;所述料盘顶起装置ⅱ17与所述料盘顶起装置ⅰ14结构相同。
17.所述双动子抓料机构2包括机架ⅱ21、线轨ⅱ22、抓料机械手ⅱ23、抓料机械手ⅲ24;所述线轨ⅱ22安装在所述机架ⅱ21上;所述抓料机械手ⅱ24使用滑块ⅱ25安装在所述线轨ⅱ22上;所述抓料机械手ⅲ24使用滑块ⅲ26安装在所述线轨ⅱ22上;所述抓料机械手ⅱ23在电机ⅱ27的驱动下沿所述线轨ⅱ22来回运动;所述抓料机械手ⅲ24在电机ⅲ(图中未示出)的驱动下沿所述线轨ⅱ22来回运动;所述抓料机械手ⅱ23与抓料机械手ⅲ24结构一样;所述抓料机械手ⅱ23包含若干驱动电机231,每个驱动电机231连接一个抓料杆232;所述抓料杆232末端连接吸盘(图中未示出)。
18.所述视觉检测机构6包括线轨ⅲ61、视觉检测装置ⅰ62、视觉检测装置ⅱ63;所述视觉检测装置ⅰ62与视觉检测装置ⅱ63分别使用滑块安装在所述线轨ⅲ61上;所述视觉检测装置ⅰ62在电机ⅳ64的驱动下沿所述线轨ⅲ61来回运动;所述视觉检测装置ⅱ63在电机
ⅴ
65的驱动下沿所述线轨ⅲ61来回运动。
19.所述刀片翻转机构5包括线轨ⅳ51、支架52、基板53、刀片放置板54、气缸ⅲ55、推板56、摆动电机57;所述支架52安装在所述线轨ⅳ51上,在电机
ⅵ
58的驱动下沿线轨ⅳ51来回移动;电机
ⅵ
58的驱动支架52移动调整支架52的位置,以达到最佳的位置;所述基板53使用翻转轴59安装在所述支架52上;所述翻转轴59的末端连接所述摆动电机57;所述摆动电机57安装在所述支架52上,驱动翻转轴59带动基板53转动;所述基板53前段上安装刀片放置板54,刀片放置板54前部开设若干刀片放置槽541;所述刀片放置板54上方安装一推板56;所述推板56由所述气缸ⅲ55驱动做直线运动;所述气缸ⅲ55安装在所述基板53上。
20.所述进料盘机构3包括滑台ⅱ31、滑架32、机架ⅲ33;所述机架ⅲ33底面上安装两组滑轨,分别为滑轨ⅰ34、滑轨ⅱ35;所述滑台ⅱ31安装在所述滑轨ⅰ34上,在驱动电机ⅰ36的驱动下,皮带ⅰ37的传动下沿滑轨ⅰ34来回运动;所述滑架32安装在所述滑轨ⅱ35上,在驱动
电机ⅱ38的驱动下,皮带ⅱ39的传动下沿滑轨ⅱ35来回运动;所述滑台ⅱ31上设置料盘顶盘311;所述料盘顶盘311在顶起气缸ⅱ312的作用下上下移动。
21.所述料库系统4包括机架ⅳ41、升降装置;所述升降装置安装在所述机架ⅳ41上;所述升降装置包括升降电机42、丝杆43、导向杆44、料仓45;所述料仓45在所述升降电机42驱动,丝杆43传动下,沿所述导向杆44上下运动;所述料仓45由底板451、边板452、上盖板453组成;所述边板452设有两个;所述边板452上设有若干托脚ⅱ46。
22.本实用新型工作流程:将装有待处理刀片的料盘16放置于刀片送料机构1的料盘托架ⅱ121上,运料盘装置13的滑台ⅰ132移动到料盘托架ⅱ121下方,滑台ⅰ132上的推杆气缸1341驱动推杆1342推动料盘托板ⅰ133向上运动顶起最下端的料盘16,夹盘装置135动作夹住料盘16,料盘托板ⅰ133下降,过程中落料执行机构122的气缸ⅱ1221动作,驱动托脚1222向外移动,配合料盘托板ⅰ133托着一个料盘16向下移动到工作位,托脚1222复位,然后滑台ⅰ132带着装满待处理刀片的料盘16移动到刀片抓取位,视觉检测装置ⅰ62动作,移动到料盘16上方检测刀片的位置,抓料机械手ⅱ23上的电机ⅱ27动作,驱动抓料杆232下压,通过末端的吸盘抓取刀片,完成后抓料机械手ⅱ23移动到刀片翻转机构5的上方,抓料机械手ⅱ23上的电机ⅱ27再次动作,驱动抓料杆232下压,将刀片释放到刀片放置槽541中,然后抓料机械手ⅱ23移动到初始位置,等待下一次动作,接着气缸ⅲ55动作,驱动推板56向前运动,到位后,推板56与刀片放置槽541形成了一个一端开口的封闭空间,此时摆动电机57动作,驱动翻转轴59转动90度,翻转轴59带动基板53、刀片放置板54、推板56、气缸ⅲ55转动90度,放在刀片放置板54的刀片放置槽541中的刀片也旋转了90度,抓料机械手ⅲ24移动到翻转机构5上方,抓料机械手ⅲ24上的电机动作,驱动抓料杆下压,通过末端的吸盘抓取刀片,完成后抓料杆上升回到初始位置,视觉检测装置ⅱ63移动进料盘机构3上方,检测放置在滑台ⅱ31上的冶具8,检测完成后,视觉检测装置ⅱ63回到初始位置,抓料机械手ⅲ24移动到进料盘机构3的滑台ⅱ31的上方,驱动电机动作,驱动抓料杆下压,释放刀片,刀片放入冶具8中空的料位中,完成后,抓料机械手ⅲ24回到初始位置,完成一次的放料作业,接着抓料机械手ⅱ23,抓料机械手ⅲ24,视觉检测装置ⅰ62、视觉检测装置ⅱ63,刀片翻转机构5就这样配合动作完成对刀片的抓取和摆放的作业,经过若干次的动作后,进料盘机构3的滑台ⅱ31上的冶具8装满了刀片,然后滑台ⅱ31带着装满刀片的冶具8进入料库系统4中,料库系统4中的升降电机42动作将装满刀片的冶具8提升放入料库系统4中,完成一次完整的刀片抓取摆盘储存作业,等待进炉处理,接着进料盘机构3的滑架32移动到冶具8的供料位,运送新的冶具8往回运动,滑台ⅱ31与滑架32相向运动,到位后,滑台ⅱ31上的置料盘顶盘311在顶起气缸ⅱ312的作用向上运动,顶起冶具8,滑台ⅱ31往回运动,移动到工作位,开始进行下一次作业。
23.当需要将处理过的刀片摆放入料盘16中时,将装有处理过的刀片的冶具8放入料库系统4中,通过料库系统4与进料盘机构3的配合,一个一个将冶具8从料库系统放入进料盘机构3,通过抓料机械手ⅱ23,抓料机械手ⅲ24,视觉检测装置ⅰ62、视觉检测装置ⅱ63,刀片翻转机构5配合动作将冶具8中的刀片放入料盘16中,料盘16放满刀片将后,刀片送料机构1将装有刀片的料盘16送入料盘托架ⅰ15、料盘托架ⅱ121中储存。
24.以上所述的实施例仅仅是对本实用新型的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技
术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1