一种起重机械幅度监测系统的制作方法
1.本实用新型涉及起重机械安全监测领域,尤其是涉及一种起重机械幅度监测系统。
背景技术:
2.履带起重机等臂架类起重机械幅度是指将起重机械置于水平时,从其回转平台的回转中心线至取物装置(空载时)垂直中心线的水平距离。
3.履带起重机等臂架类起重机械幅度随着臂架组合、臂架长度和角度的变化而变化,不同幅度下允许起升的重量不一样,若超载将发生倾翻事故。现有技术多采用角度传感器测量臂架角度,根据预设的臂长来计算幅度。实际中,由于臂架的自重和外力影响,臂架产生变形,特别是臂架较长时,其自身变形导致上述方法计算的幅度和实际幅度误差较大,影响设备安全使用。
技术实现要素:
4.本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种起重机械幅度监测系统。
5.本实用新型的目的可以通过以下技术方案来实现:
6.一种起重机械幅度监测系统,该系统包括一个声波发射器和两个声波接收器,所述的声波发射器设置在起重机械臂架自由端末端,所述的声波接收器设置在起重机械臂架固定端所在平面,两个声波接收器间隔一定距离且两者连线与起重机械回转中心轴线垂直相交,该系统还包括用于存储声波接收器两者间距以及声波接收器与回转中心轴线垂直距离的存储器,用于控制声波发射器和声波接收器、获取两个声波接收器与声波发射器之间距离、获取存储器中距离信息并计算得到起重机械幅度的控制器,所述的控制器分别连接声波发射器、声波接收器和存储器。
7.优选地,所述的声波发射器为超声波发射器,对应地,所述的声波接收器包括超声波接收器。
8.优选地,所述的声波发射器和声波接收器通过通信模块连接所述的控制器。
9.优选地,所述的通信模块包括无线通信模块。
10.优选地,所述的控制器包括具有数字逻辑处理功能的微处理器。
11.优选地,所述的微处理器包括单片机、dsp中的任意一种。
12.优选地,该系统还包括用于幅度超限报警的报警器,所述的报警器连接所述的控制器。
13.优选地,所述的报警器包括声光报警器,所述的声光报警器设置在起重机械驾驶室内。
14.优选地,所述的报警器还包括远程报警终端。
15.优选地,所述的远程报警终端包括远程监控pc、手持显示设备中的任意一种或多
种的组合。
16.与现有技术相比,本实用新型具有如下优点:
17.(1)本实用新型通过在臂架自由端和固定端分别设置声波发射器和声波接收器,通过距离检测,方便实现对实际幅度的实时检测,检测精度高;
18.(2)本实用新型设置报警器,在幅度超限时能够及时报警,保证设备安全。
附图说明
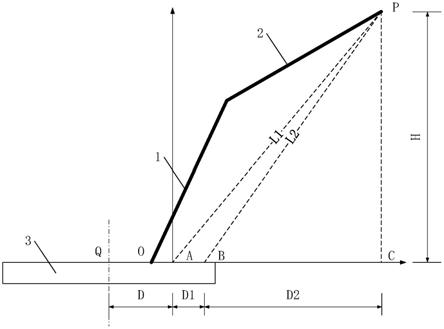
19.图1为本实用新型一种起重机械幅度监测系统的结构示意图;
20.图中,1为主臂,2为副臂,3为回转部件。
具体实施方式
21.下面结合附图和具体实施例对本实用新型进行详细说明。注意,以下的实施方式的说明只是实质上的例示,本实用新型并不意在对其适用物或其用途进行限定,且本实用新型并不限定于以下的实施方式。
22.实施例
23.如图1所示,本实施例提供一种起重机械幅度监测系统,起重机械臂架包括依次连接的主臂1和副臂2,主臂1固定在回转部件3上,副臂2端部为起重机械臂架自由端。起重机械幅度监测系统包括一个声波发射器和两个声波接收器,声波发射器设置在起重机械臂架自由端末端,图中p点位置,声波接收器设置在起重机械臂架固定端所在平面,两个声波接收器间隔一定距离且两者连线与起重机械回转中心轴线垂直相交,两个声波接收器分别为第一声波接收器和第二声波接收器,图中a、b两点位置,由于起重机械臂架固定端在回转部件3上表面上,图中,o点为起重机械臂架固定端的中心点,因此,两个声波接收器设置在回转部件3上表面,图中,q为起重机械回转中心轴线,a、b两点连线与起重机械回转中心轴线q垂直相交。声波发射器为超声波发射器,对应地,声波接收器包括超声波接收器,声波发射器和声波接收器通过通信模块连接控制器,通信模块包括无线通信模块。
24.该系统还包括用于存储声波接收器两者间距以及声波接收器与回转中心轴线垂直距离的存储器,用于控制声波发射器和声波接收器、获取两个声波接收器与声波发射器之间距离、获取存储器中距离信息并计算得到起重机械幅度的控制器,控制器分别连接声波发射器、声波接收器和存储器。
25.控制器包括具有数字逻辑处理功能的微处理器,微处理器包括单片机、dsp中的任意一种,本实施例采用单片机。
26.该系统还包括用于幅度超限报警的报警器,报警器连接控制器,报警器包括声光报警器,声光报警器设置在起重机械驾驶室内,报警器还包括远程报警终端,远程报警终端包括远程监控pc、手持显示设备中的任意一种或多种的组合。在幅度超限时,声光报警器和远程报警终端能够及时报警,保证设备安全。
27.上述起重机械幅度监测系统进行幅度检测的具体原理为:
28.控制器控制声波发射器和声波接收器运行;
29.声波发射器根据控制信号向声波接收器发送声波信号,声波频率为100khz,发射频率为1hz,声波发射器接收到控制信号,以1hz频率,向声波接收器发射频率为100khz的声
波,声波接收器实时接收声波信号,控制器根据声波收发时间间隔计算两个声波接收器与声波发射器之间距离,将距离回转中心轴线距离较近的声波接收器记作第一声波接收器,将距离回转中心轴线距离较远的声波接收器记作第二声波接收器,第一声波接收器与声波发射器之间的距离为l1,第二声波接收器与声波发射器之间的距离为l2;
30.获取存储器中的距离信息,包括第一声波接收器与回转中心轴线垂直距离d,第一声波接收器和第二声波接收器之间的间距d1;
31.直角
△
pac中:
32.直角
△
pbc中:
33.解得:
[0034][0035]
因此,计算起重机械幅度f:
[0036][0037]
如l1=100m,l2=98m,d=5m,d1=2m,则:d2=98m;
[0038]
起重机械幅度f=105m;
[0039]
当幅度超限时,控制器控制声光报警器进行声光报警,同时远程报警终端进行远程报警。
[0040]
需要说明的是,本实用新型保护的是起重机械幅度监测系统的硬件组成结构,起重机械幅度的计算方法并不在本实用新型要求保护的范围内。
[0041]
上述实施方式仅为例举,不表示对本实用新型范围的限定。这些实施方式还能以其它各种方式来实施,且能在不脱离本实用新型技术思想的范围内作各种省略、置换、变更。
技术特征:
1.一种起重机械幅度监测系统,其特征在于,该系统包括一个声波发射器和两个声波接收器,所述的声波发射器设置在起重机械臂架自由端末端,所述的声波接收器设置在起重机械臂架固定端所在平面,两个声波接收器间隔一定距离且两者连线与起重机械回转中心轴线垂直相交,该系统还包括用于存储声波接收器两者间距以及声波接收器与回转中心轴线垂直距离的存储器,用于控制声波发射器和声波接收器、获取两个声波接收器与声波发射器之间距离、获取存储器中距离信息并计算得到起重机械幅度的控制器,所述的控制器分别连接声波发射器、声波接收器和存储器。2.根据权利要求1所述的一种起重机械幅度监测系统,其特征在于,所述的声波发射器为超声波发射器,对应地,所述的声波接收器包括超声波接收器。3.根据权利要求1所述的一种起重机械幅度监测系统,其特征在于,所述的声波发射器和声波接收器通过通信模块连接所述的控制器。4.根据权利要求3所述的一种起重机械幅度监测系统,其特征在于,所述的通信模块包括无线通信模块。5.根据权利要求1所述的一种起重机械幅度监测系统,其特征在于,所述的控制器包括具有数字逻辑处理功能的微处理器。6.根据权利要求5所述的一种起重机械幅度监测系统,其特征在于,所述的微处理器包括单片机、dsp中的任意一种。7.根据权利要求1所述的一种起重机械幅度监测系统,其特征在于,该系统还包括用于幅度超限报警的报警器,所述的报警器连接所述的控制器。8.根据权利要求7所述的一种起重机械幅度监测系统,其特征在于,所述的报警器包括声光报警器,所述的声光报警器设置在起重机械驾驶室内。9.根据权利要求8所述的一种起重机械幅度监测系统,其特征在于,所述的报警器还包括远程报警终端。10.根据权利要求9所述的一种起重机械幅度监测系统,其特征在于,所述的远程报警终端包括远程监控pc、手持显示设备中的任意一种或多种的组合。
技术总结
本实用新型涉及一种起重机械幅度监测系统,该系统包括一个声波发射器和两个声波接收器,所述的声波发射器设置在起重机械臂架自由端末端,所述的声波接收器设置在起重机械臂架固定端所在平面,两个声波接收器间隔一定距离且两者连线与起重机械回转中心轴线垂直相交,该系统还包括用于存储声波接收器两者间距以及声波接收器与回转中心轴线垂直距离的存储器,用于控制声波发射器和声波接收器、获取两个声波接收器与声波发射器之间距离、获取存储器中距离信息并计算得到起重机械幅度的控制器,所述的控制器分别连接声波发射器、声波接收器和存储器。与现有技术相比,本实用新型具有幅度测量精度高,设备安全性高等优点。设备安全性高等优点。设备安全性高等优点。
技术研发人员:龚文 金彦 杭杰 诸征 余杰 李传磊 蒋瑜 黄正球 李振林 汪敬东 刘恩频
受保护的技术使用者:上海市特种设备监督检验技术研究院
技术研发日:2021.07.30
技术公布日:2022/3/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1