一种手机镜筒内隔圈的摆盘设备的制作方法
1.本实用新型涉及机械设备技术领域,尤其涉及了一种手机镜筒内隔圈的摆盘设备。
背景技术:
2.微小零件的制造商,尤其是3c行业,经常会遇到微小零件排列难的问题:人工排列费时费力,效率不高,人工成本太大,还不能满足生产需要。
3.现有技术中,应用于手机镜筒内隔圈的直径为2.0-12.0mm、厚度为0.02mm左右,实际应用时隔圈需要区分方向或正反面,当大批量隔圈需要分离、摆盘,现有的摆盘工艺存在以下不足:(1)人工摆盘,效率低,员工利用真空吸盘12小时只能摆放约12000片左右;(2) 产品特殊,产品轻薄,需要区分方向或正反面,不易取放,造成人工取放难度大;(3)人工摆放存在角度不正或正反面摆错等失误现象,造成需要返工;(4)由于产品排版工艺多、产品特殊,造成排版工艺劳动强度大,需要大量员工完成;(5)需要增加大量中转仓储,物流成本等额外支出。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的就在于提供了一种手机镜筒内隔圈的摆盘设备,提高了生产效率、生产品质,降低了生产成本。
5.为了实现上述目的,本实用新型采用的技术方案是这样的:一种手机镜筒内隔圈的摆盘设备,包括机箱机构与平台机构,所述机箱机构包括上箱体、下箱体,所述上箱体设置于下箱体上,且上箱体与下箱体组成呈柜状结构;所述平台机构设置于柜状结构的机箱机构内,所述平台机构包括:
6.隔圈供料系统,所述隔圈供料系统包括隔圈供料振动盘、柔性供料振动盘,所述隔圈供料振动盘用以通过振动持续均匀的将隔圈供料至柔性供料振动盘上,所述柔性供料振动盘用以通过振动的方式使至少部分隔圈翻转;
7.隔圈上方拍照定位机构,所述隔圈上方拍照定位机构位于柔性供料振动盘上方位置,用于对柔性供料振动盘内排布的隔圈进行拍照定位隔圈的位置并获取隔圈正面朝上或者反面朝上的图像;
8.隔圈吸取机构,能够做升降运动,所述隔圈上方拍照定位机构提供隔圈的位置和图像的参数信息至隔圈吸取机构,所述隔圈吸取机构通过xy轴机器人运动至柔性供料振动盘内待吸取的隔圈上方位置,吸取设定面朝上或朝下的隔圈,再由所述xy轴机器人驱动,将其移动至等待整列的整列治具板上方,所述隔圈吸取机构将隔圈摆放至等待整列的整列治具板的空穴中。
9.作为一种优选方案,还包括隔圈下方拍照定位机构和整列治具板上方拍照定位机构,其中:
10.所述隔圈吸取机构吸取柔性供料振动盘上的隔圈后,由所述xy轴机器人驱动运动
至隔圈下方拍照定位机构上方位置,所述隔圈下方拍照定位机构对隔圈进行拍照,并获取所述隔圈的位置信息;
11.整列治具板上方拍照定位机构对等待整列的整列治具板进行拍照,获得该整列治具板上空穴的位置信息;
12.所述xy轴机器人根据所述隔圈吸取机构上的隔圈位置信息以及整列治具板上空穴的位置信息,移动所述隔圈吸取机构至等待整列的整列治具板上方,并使得所述隔圈吸取机构上的隔圈对准其中一个所述整列治具板上的空穴,再由所述隔圈吸取机构将所述隔圈放置到该空穴中。
13.作为一种优选方案,所述隔圈吸取机构包括隔圈吸嘴旋转电机、隔圈吸嘴上下电机、隔圈吸嘴、隔圈吸取真空发生器、旋转凸轮、拉簧,所述隔圈吸嘴旋转电机驱动隔圈吸嘴做旋转运动用以调整隔圈角度,所述隔圈吸嘴上下电机正反转驱动旋转凸轮运动,旋转凸轮配合拉簧传动隔圈吸嘴在竖直方向上做升降运动,所述隔圈吸取真空发生器连接隔圈吸嘴用以吸取隔圈。
14.作为一种优选方案,所述xy轴机器人包括结构相同的x轴机器人和y轴机器人,所述x 轴机器人包括x轴伺服电机、x轴模组、x轴滑块、x轴固定板,所述x轴伺服电机通过正反转驱动x轴模组上的x轴滑块往复运动,所述隔圈吸取机构固定设置于x轴滑块上;所述y 轴机器人包括y轴伺服电机、y轴模组、y轴滑块、y轴导轨,所述x轴机器人通过x轴固定板设置于y轴滑块和y轴导轨上,所述y轴伺服电机通过正反转驱动y轴模组上的y轴滑块和y轴导轨往复运动。
15.作为一种优选方案,所述隔圈上方拍照定位机构、隔圈下方拍照定位机构的结构相同,均包括隔圈拍照相机,该隔圈拍照相机处设置有隔圈拍照光源。
16.作为一种优选方案,还包括整列治具板搬运机构,所述整列治具板搬运机构的一端为摆盘位、另一端为供料回收位,供料回收位的端部设置有整列治具板仓储;所述整列治具板仓储提供整列治具板至供料回收位上或者从供料回收位上回收整列治具板,整列治具板通过整列治具板搬运机构在供料回收位与摆盘位之间往复运动。
17.作为一种优选方案,所述整列治具板上方拍照定位机构设置于摆盘位的上方位置,整列治具板上方拍照定位机构对摆盘位上等待整列的整列治具板进行拍照,获得该整列治具板上空穴的位置信息。
18.作为一种优选方案,所述整列治具板搬运机构包括治具板搬运电机、治具板传动皮带、治具板拨爪,所述治具板拨爪用于对整列治具板的定位推拉,所述治具板搬运电机驱动治具板传动皮带传动治具板拨爪定位的整列治具板在供料回收位和摆盘位之间往复运动。
19.作为一种优选方案,所述整列治具板仓储的下方位置设置有整列治具板仓储升降机构,所述整列治具板仓储升降机构包括仓储升降电机、仓储升降丝杆、仓储定位板、整列治具板检测器;所述整列治具板仓储设置于仓储定位板上,仓储升降电机驱动仓储升降丝杆传动仓储定位板上的整列治具板仓储做升降运动,用以对整列治具板的供料和回收;所述整列治具板检测器设置于整列治具板仓储的侧部,用以检测整列治具板是否放置到位、摆放层数数量。
20.作为一种优选方案,所述整列治具板上方拍照定位机构的结构与隔圈上方拍照定
位机构、隔圈下方拍照定位机构的结构相同。
21.与现有技术相比,本实用新型的有益效果:
22.(1)降低工艺难度,产品小、轻、薄、异型,特征肉眼不可见时能够区分方向、识别正反,整列治具板精度高、摆盘难度大,由设备整合高精度相机识别,机器人搬运、摆盘,解放生产力;
23.(2)提升良率,增加产品竞争力,设备能够自动摆盘,使生产效率、摆盘良率、生产工艺、成本优化得到较大的提升;
24.(3)提升效率,降低成本,兼容性强,减少浪费,不同型号产品,设备只需更换隔圈吸嘴,即可生产,减少专机专用的浪费;
25.(4)整列治具板仓储与其他配套设备联机共用,实际生产时每一小时员工更换一次整列治具板仓储,隔圈每两小时添加一次,周边配套中转仓储取消,降低物流成本。
附图说明
26.图1是本实用新型中平台机构的布局示意图一;
27.图2是本实用新型中平台机构的布局示意图二;
28.图3是本实用新型中隔圈供料系统的结构示意图;
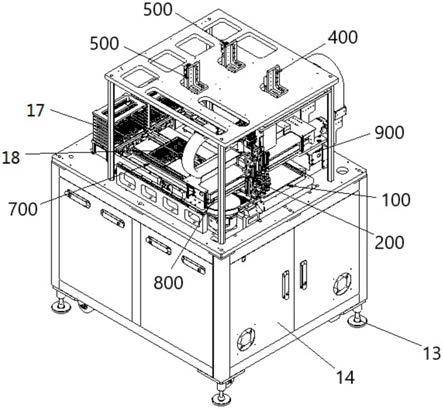
29.图4是本实用新型的整机结构示意图;
30.图5是本实用新型中隔圈吸取机构的结构示意图;
31.图6是本实用新型中xy轴机器人的结构示意图;
32.图7是本实用新型中隔圈下方拍照相机机构的结构示意图;
33.图8是本实用新型中图1的局部布局示意图;
34.图9是本实用新型中整列治具板搬运机构的结构示意图;
35.图10是本实用新型中整列治具板仓储升降机构的结构示意图;
36.其中:10、报警器;11、显示屏;12、操作键鼠;13、支脚;14、下箱体;15、上箱体; 16、运行指示灯;17、整列治具板仓储;18整列治具板;100、隔圈供料系统;101、隔圈供料振动盘;102、柔性供料振动盘;200、隔圈吸取机构;201、隔圈吸嘴旋转电机;202、隔圈吸嘴上下电机;203、隔圈吸嘴;204、隔圈吸取真空发生器;205、旋转凸轮;206、拉簧; 300、隔圈下方拍照定位机构;301、隔圈拍照相机;302、隔圈拍照光源;400、隔圈上方拍照定位机构;500、整列治具板上方拍照定位机构;600、整列治具板仓储升降机构;601、仓储升降电机;602、仓储升降丝杆;603、仓储定位板;604、整列治具板检测器;700、整列治具板搬运机构;701、治具板搬运电机;702、治具板传动皮带;703、治具板拨爪; 800、x轴机器人;801、x轴伺服电机;802、x轴模组;803、x轴滑块;804、x轴固定板; 900、y轴机器人;901、y轴伺服电机;902、y轴模组;903、y轴滑块;904、y轴导轨。
具体实施方式
37.下面结合具体实施例对本实用新型作进一步描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,而不能以此来限制本实用新型的保护范围。
38.实施例:
39.如图1~4所示,一种手机镜筒内隔圈的摆盘设备,包括机箱机构与平台机构,所述
900,所述x轴机器人800包括x轴伺服电机801、x轴模组802、x轴滑块803、x轴固定板 804,所述x轴伺服电机801通过正反转驱动x轴模组802上的x轴滑块803往复运动,所述隔圈吸取机构200固定设置于x轴滑块803上;所述y轴机器人900包括y轴伺服电机901、 y轴模组902、y轴滑块903、y轴导轨904,所述x轴机器人800通过x轴固定板804设置于 y轴滑块903和y轴导轨904上,所述y轴伺服电机901通过正反转驱动y轴模组902上的y 轴滑块903和y轴导轨904往复运动。
53.优选的,如图7所示,所述隔圈上方拍照定位机构400、隔圈下方拍照定位机构300的结构相同,均包括隔圈拍照相机301,该隔圈拍照相机301处设置有隔圈拍照光源302。
54.具体的,柔性供料振动盘102的托盘回原位后,隔圈上方拍照定位机构400工作,隔圈拍照光源302打开,隔圈拍照相机301对柔性供料振动盘102内排布的隔圈进行拍照定位。
55.更为具体的,所述隔圈下方拍照定位机构300的隔圈拍照相机301为隔圈拍照四目相机,该数量与隔圈吸嘴203的数量相同,在本实施例中隔圈拍照四目相机对四个隔圈吸嘴203上吸取的隔圈进行同时拍照处理。
56.优选的,如图8所示,还包括整列治具板搬运机构700,所述整列治具板搬运机构700 的一端为摆盘位、另一端为供料回收位,供料回收位的端部设置有整列治具板仓储17,所述整列治具板仓储17提供整列治具板至供料回收位上或者从供料回收位上回收整列治具板18,整列治具板18通过整列治具板搬运机构700在供料回收位与摆盘位之间往复运动。
57.更为优选的,整列治具板上方拍照定位机构500设置于摆盘位的上方位置,所述整列治具板上方拍照定位机构500对摆盘位上的整列治具板18进行拍照定位,获得该整列治具板 18上空穴的位置信息。
58.优选的,如图9所示,所述整列治具板搬运机构700包括治具板搬运电机701、治具板传动皮带702、治具板拨爪703,所述治具板拨爪703用于对整列治具板18的定位推拉,所述治具板搬运电机701驱动治具板传动皮带702传动治具板拨爪703定位的整列治具板18在供料回收位和摆盘位之间往复运动。
59.优选的,如图10所示,所述整列治具板仓储17的下方位置设置有整列治具板仓储升降机构600,所述整列治具板仓储升降机构600包括仓储升降电机601、仓储升降丝杆602、仓储定位板603、整列治具板检测器604;所述整列治具板仓储17设置于仓储定位板603上,仓储升降电机601驱动仓储升降丝杆602传动仓储定位板603上的整列治具板仓储17做升降运动,用以对整列治具板18的供料和回收;所述整列治具板检测器604设置于整列治具板仓储17的侧部,用以检测整列治具板18是否放置到位、摆放层数数量。
60.优选的,所述整列治具板上方拍照定位机构500的结构与隔圈上方拍照定位机构400、隔圈下方拍照定位机构300的结构相同,该结构这里就不再一一赘述了。
61.具体的,整列治具板搬运机构700将整列治具板18搬运至摆盘位后,拍照光源打开,整列治具板上方拍照定位机构500对整列治具板18拍照定位。
62.在本实施例中,本技术的摆盘设备包含:一组隔圈供料系统100、一组隔圈吸取机构200、一组隔圈下方拍照定位机构300、两组隔圈上方拍照定位机构400、两组整列治具板上方拍照定位机构500、两组整列治具板仓储17、两组整列治具板仓储升降机构600、两组整列治具板搬运机构700、一组x轴机器人800、一组y轴机器人900,自动整合完整作业,一组隔圈吸取机构200交替摆放隔圈在两组整列治具板搬运机构700上,即当一组整列治具板搬运
机构700的整列治具板18被摆放完成后,该组整列治具板搬运机构700移载该摆放完成的整列治具板18至该组的整列治具板仓储17处进行回收,同时另一组整列治具板仓储17提供空的整列治具板18,另一组的整列治具板搬运机构700移载该空的整列治具板18至该组摆放位进行摆放。
63.本技术的设备工作流程如下:员工将整列治具板仓储17放置入仓储定位板603处,整列治具板仓储17通过整列治具板仓储升降机构600带动整列治具板仓储17在竖直方向上做升降运动,配合整列治具板仓储17侧部的整列治具板检测器604自动对整列治具板仓储17内整列治具板18的位置进行识别和判断,通过检测识别整列治具板仓储17内整列治具板18的摆放层数、判断整列治具板仓储17内的整列治具板18是否有未放置到位等信息,防止整列治具板18放置不到位发生撞击;整列治具板搬运机构700通过整列治具板仓储升降机构600 升降运动,由整列治具板搬运机构700的治具板拨爪703对整列治具板仓储17内的整列治具板18进行定位后分板,将整列治具板18搬运至摆盘位,等待隔圈摆放;员工将一定的数量厚度为0.02mm左右、直径2.0-12.0mm左右的隔圈添加在隔圈供料振动盘101内,隔圈供料振动盘101采用振动方式自动将隔圈搬运至柔性供料振动盘102内;隔圈上方拍照定位机构 400对柔性供料振动盘102内的隔圈进行拍照定位、正反面识别;隔圈吸取机构200依照隔圈上方拍照定位机构400提供的产品位置和方向等参数信息,依靠x轴机器人800和y轴机器人900前后左右运动,将隔圈吸取机构200运行至可供吸取的隔圈上方位置,依靠隔圈吸取机构200开启真空模式将隔圈逐个吸取,通过隔圈吸取真空发生器204内部参数对比,判断和排除隔圈漏吸;x轴机器人800将隔圈吸取机构200运动至隔圈下方拍照定位机构300 位置对隔圈吸嘴203吸取的隔圈进行拍照,用以识别隔圈方向、角度和当前位置坐标参数信息;y轴机器人900将隔圈吸取机构200移载至等待整列的整列治具板18上方,隔圈吸嘴 203将隔圈摆入整列治具板18仿形槽内。
64.以上所述仅是本实用新型的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1