一种物料搬运机器人的制作方法
1.本实用新型涉及物料搬运机器人技术领域,具体地说是一种物料搬运机器人。
背景技术:
2.工厂生产需要的各种物料,目前是将物料放于标准周转箱后堆放在物料运送小车后,以人力运送的方式运送至产线各个生产上料点,人力成本较大。
3.为了节省人力,出现了用于物料运送的叉车式机器人。目前市场上,叉车式机器人都是在宽度大于1.8米的通道内通行的,采用双叉臂的方式进行抬升、搬运、堆高等动作,而且多用于仓库等纯物流运送环境。但是这种叉车式机器人在人机混杂的工厂内部,或在宽度小于1.2米的窄通道内无法通行并完成运送物料工作。
4.因此,需要设计一种物料搬运机器人,能够在保证周边人员安全的前提下,在人机混杂的窄通道内通行、工作。
技术实现要素:
5.本实用新型的目的是克服现有技术的不足,提供了一种物料搬运机器人,能够在保证周边人员安全的前提下,在人机混杂的窄通道内通行、工作。
6.为了达到上述目的,本实用新型提供一种物料搬运机器人,包括机器人本体、提醒装置、急停开关、安全触边开关、货物限高检测光电、倾斜避障检测光电、货物到位检测开关、叉尖光电开关、激光检测装置,机器人本体的顶部安装有提醒装置和急停开关,机器人本体的底部安装有安全触边开关和激光检测装置,机器人本体的后侧顶部设有货物限高检测光电、倾斜避障检测光电,机器人本体的后侧底部设有货物到位检测开关,机器人本体的叉臂尾部安装有叉尖光电开关。
7.可选的,所述的提醒装置的驱动端与控制芯片的灯光驱动接口连接,控制芯片的急停信号接口与急停信号接地接口之间串联有急停开关,急停开关的联动开关串联在驱动器的驱动电路上,控制芯片的安全触边信号接口与安全触边接地接口之间串联有安全触边开关,控制芯片的激光信号接口与激光检测装置的信号输出端连接,控制芯片的货物到位信号接口与货物到位接地接口之间串联有货物到位检测开关,控制芯片的货物限高信号接口与货物限高检测光电的信号输出端链接,控制芯片的倾斜信号接口与倾斜避障检测光电的信号输出端链接, 控制芯片的叉尖信号接口与叉尖光电开关的信号输出端链接。
8.可选的,所述的驱动器的驱动端与伺服电机连接,伺服电机安装在机器人本体的前侧壳体内。
9.可选的,所述的控制芯片、驱动器安装在机器人本体的前侧壳体内。
10.可选的,所述的提醒装置包括蓝光灯、三色灯、支架,支架安装在机器人本体的顶部,三色灯安装在支架的顶部,蓝光灯安装在支架的前侧、左侧和右侧,三色灯的正极与控制芯片的灯光驱动接口二连接,三色灯的负极接地。
11.可选的,所述的机器人本体的前侧壳体表面安装有氛围灯,控制芯片的氛围灯驱
动接口、氛围灯接地接口分别与氛围灯的正极、负极连接。
12.可选的,所述的机器人本体的顶部还安装有激光导航器,激光导航器的驱动端与控制芯片的激光导航驱动接口连接。
13.可选的,所述的控制芯片的型号为src2000。
14.可选的,所述的叉尖光电开关安装在叉臂尾部的两侧。
15.可选的,所述的货物限高检测光电、倾斜避障检测光电、叉尖光电开关的正极与电源连接,负极接地。
16.本实用新型同现有技术相比,在物料搬运机器人顶部增设提醒装置,提醒周边人员保持安全距离,安全探测器的设置能够检测周围是否存在障碍物或人员,避免发生碰撞事故。物料搬运机器人的各个位置设置的各类传感器,能够保证货物放置位置准确,防止货物倾倒,保证物料搬运机器人运行的稳定性,进一步提高安全系数,使物料搬运机器人在保证周边人员安全的前提下,在人机混杂的窄通道内通行、工作。
附图说明
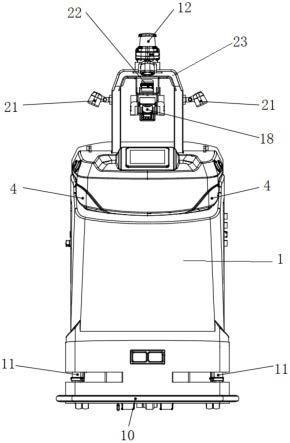
17.图1为本实用新型物料搬运机器人的主视图。
18.图2为本实用新型物料搬运机器人的侧视图。
19.图3为本实用新型物料搬运机器人的立体图。
20.图4为本实用新型物料搬运机器人去除外壳后的立体图。
21.图5为本实用新型物料搬运机器人的电路示意图。
22.附图标记说明:1为机器人本体,3为控制芯片,4为氛围灯,5为急停开关,6为驱动器,9为伺服电机,10为安全触边开关,11为激光检测装置,12为激光导航器,13为货物到位检测开关,14为货物限高检测光电,15为叉尖光电开关,18为倾斜避障检测光电,21为蓝光灯,22为三色灯,23为支架。
具体实施方式
23.现结合附图对本实用新型做进一步描述。
24.参见图1~图4,本实用新型提供一种物料搬运机器人,包括机器人本体、提醒装置、急停开关、安全触边开关、货物限高检测光电、倾斜避障检测光电、货物到位检测开关、叉尖光电开关、激光检测装置,机器人本体1的顶部安装有提醒装置和急停开关5,机器人本体1的底部安装有安全触边开关10和激光检测装置11,机器人本体1的后侧顶部设有货物限高检测光电14、倾斜避障检测光电18,机器人本体1的后侧底部设有货物到位检测开关13,机器人本体1的叉臂尾部安装有叉尖光电开关15。
25.参见图5,提醒装置的驱动端与控制芯片3的灯光驱动接口连接,控制芯片3的急停信号接口与急停信号接地接口之间串联有急停开关5,急停开关5的联动开关51串联在驱动器6的驱动电路上,控制芯片3的安全触边信号接口与安全触边接地接口之间串联有安全触边开关10,控制芯片3的激光信号接口与激光检测装置11的信号输出端连接,控制芯片3的货物到位信号接口与货物到位接地接口之间串联有货物到位检测开关13,控制芯片3的货物限高信号接口与货物限高检测光电14的信号输出端链接,控制芯片3的倾斜信号接口与倾斜避障检测光电18的信号输出端链接, 控制芯片3的叉尖信号接口与叉尖光电开关15的
信号输出端链接。
26.提醒装置包括蓝光灯21、三色灯22、支架23,支架23安装在机器人本体1的顶部,三色灯22安装在支架23的顶部,蓝光灯21安装在支架23的前侧、左侧和右侧,蓝光灯常亮,三色灯22的正极与控制芯片3的灯光驱动接口二连接,三色灯22的负极接地。在使用过程中,蓝光灯21从视觉上划出机器人本体1运行中的安全范围,提醒周围的人员等保持安全距离;三色灯22提供闪烁灯光,提醒周围的人员等注意避让。
27.机器人本体1的前侧壳体表面安装有氛围灯4,控制芯片3的氛围灯驱动接口、氛围灯接地接口分别与氛围灯4的正极、负极连接。
28.驱动器6的驱动端与伺服电机9连接,驱动器6采用伺服电机9驱动,伺服电机9安装在机器人本体1的前侧壳体内。控制芯片3、驱动器6安装在机器人本体1的前侧壳体内。
29.机器人本体1的顶部还安装有激光导航器12,激光导航器12的驱动端与控制芯片3的激光导航驱动接口连接。激光导航器12用于规划机器人本体1的行径路径。
30.叉尖光电开关15安装在叉臂尾部的两侧,以便于更好地探测叉臂尾部不同位置是否有障碍物,
31.货物限高检测光电14、倾斜避障检测光电18、叉尖光电开关15的正极与电源连接,负极接地。
32.控制芯片3的型号为src2000。
33.本实用新型在物料搬运机器人顶部增设提醒装置,提醒周边人员保持安全距离,安全探测器的设置能够检测周围是否存在障碍物或人员,避免发生碰撞事故。物料搬运机器人的各个位置设置的各类传感器,能够保证货物放置位置准确,防止货物倾倒,保证物料搬运机器人运行的稳定性,进一步提高安全系数,使物料搬运机器人在保证周边人员安全的前提下,在人机混杂的窄通道内通行、工作。
34.本实用新型在工作时,控制芯片3驱动蓝光灯21、三色灯22点亮,蓝光灯21从视觉上划出机器人本体1运行中的安全范围,提醒周围的人员等保持安全距离,避免碰撞事故发生;三色灯22提供闪烁灯光,提醒周围的人员等注意避让。
35.当机器人本体1在运行过程中,发生危险等紧急情况,周边人员可以按下急停开关5,急停开关5断开,控制芯片3的急停信号接口获得急停信号,急停开关5的联动开关51同时断开,驱动器6停止工作。
36.当货物堆放到叉臂上时,货物到位检测开关13闭合,控制芯片3的货物到位信号获得信号。
37.当控制芯片3获得货物到位信号且货物堆放超过限制高度时,货物限高检测光电14发送信号给控制芯片3的货物限高信号接口;当控制芯片3获得货物到位信号且货物发生倾斜时,倾斜避障检测光电18发送信号给控制芯片3的倾斜信号接口;当控制芯片3接收到限高信号或倾斜信号时,控制芯片3通过急停信号接口控制急停开关5断开,联动开关51直接断开驱动器6的使能信号,并发送状态信息至控制芯片3。
38.本实用新型通过货物到位检测开关13、货物限高检测光电14、倾斜避障检测光电18的设置,限制了货物的堆叠高度,防止货物倾倒,确保货物正确的取放,提高了机器人在搬运货物过程中的安全性以及搬运过程中货物的稳定性。
39.当机器人本体1的前侧检测到障碍物或周边人员时,激光检测装置11发送信号给
控制芯片3的激光信号接口;当机器人本体1的后侧检测到障碍物或周边人员时,叉尖光电开关15发送信号给控制芯片3的叉尖信号接口;当安全触边开关10碰触到障碍物或周边人员时,安全触边开关10闭合,控制芯片3的安全触边信号接口获得安全触边信号;当控制芯片3接收到激光信号或叉尖信号或安全触边信号时,控制芯片3通过急停信号接口控制急停开关5断开,联动开关51直接断开驱动器6的使能信号,并发送状态信息至控制芯片3。
40.本实用新型通过激光检测装置11、安全触边开关10、叉尖光电开关15的设置,检测机器人本体1前侧、后侧及周围是否有障碍物或周边人员,避免发生碰撞,提高了机器人在工作过程中的安全性。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1