一种坩埚装箱机械手设备的制作方法
1.本发明属于坩埚生产领域,尤其是涉及一种坩埚装箱机械手设备。
背景技术:
2.石英坩埚,具有高纯度、耐温性强、尺寸大、精度高、保温性好、节约能源、质量稳定等优点,应用越来越广泛,随着石英坩埚向大型化发展,石英坩埚的体积越来越大,重量越来越重,人工装箱工作费时费力,使用石英坩埚装箱系统解决了石英坩锅的包装问题,保证了产品质量。
技术实现要素:
3.有鉴于此,本发明旨在提出一种坩埚装箱机械手设备,以解决现有技术的不足。
4.为达到上述目的,本发明的技术方案是这样实现的:
5.一种坩埚装箱机械手设备,包括平移升降机构、坩埚抱爪机构、传输机构和控制器,所述平移升降机构包括机架、平移组件和升降组件,所述机架一侧设有控制器,机架内部两侧分别设有一个传输机构,传输机构上方设有坩埚抱爪机构,所述坩埚抱爪机构顶部可拆卸连接至升降组件,升降组件一侧连接至平移组件,且平移组件和升降组件均滑动连接至机架,所述平移组件、升降组件、坩埚抱爪机构、传输机构均信号连接至控制器。
6.进一步的,所述机架包括桁架、2个固定架和4个防护网,所述桁架为条形结构,桁架中部分别滑动连接至平移组件和升降组件,桁架两端分别固定连接一个固定架,2个固定架对称设置,且每个固定架内侧分别设有一个传输机构,每个固定架上均安装2个防护网。
7.进一步的,所述平移组件包括平移减速机、平移电机、平移固定座、平移齿条、平移滑轨、平移齿轮和平移滑块,所述平移减速机的输入端固定连接至平移电机的输出轴,平移减速机的输出端通过平移固定座固定连接至平移齿轮,平移齿轮与平移齿条啮合传动,平移齿条固定至桁架一侧,平移固定座一侧通过4个平移滑块滑动卡接至平移滑轨,平移滑轨固定住桁架顶部,平移减速机、平移电机的驱动器均信号连接至控制器。
8.进一步的,所述升降组件包括升降减速机、升降电机、升降齿条、升降齿轮、升降手臂和升降滑块,所述升降减速机的输入端固定连接至升降电机的输出轴,升降减速机的输出端通过平移固定座固定连接至升降齿轮,升降齿轮与升降齿条啮合传动,升降齿条固定至升降手臂一侧,升降手臂底部可拆卸连接至坩埚抱爪机构,升降手臂两侧分别通过一个升降滑块固定至平移固定座,所述升降减速机、升降电机的驱动器均信号连接至控制器。
9.进一步的,所述坩埚抱爪机构包括抱爪支架、同步带结构、抱爪减速机、抱爪电机、接近开关、压力传感器、一号同步带轮、二号同步带轮、三号同步带轮、四号同步带轮、4个抱爪手臂、4个直线导轨和4个同步带惰轮,所述抱爪支架为十字架结构,抱爪固定架上方分别安装接近开关、压力传感器,抱爪支架轴心上方设有升降连接板,抱爪支架通过升降连接板可拆卸连接至升降手臂,抱爪支架轴心下方设有4个同步带惰轮,4个同步带惰轮呈正方形排布,且4个同步带惰轮传动连接至同步带结构中部,抱爪支架内部四角还分别滑动一个直
线导轨,每个滑动导轨底部分别固定连接一个抱爪手臂,每个滑动导轨一侧均与同步带结构相连接,同步带结构为闭环结构,一号同步带轮、二号同步带轮、三号同步带轮、四号同步带轮分别传动连接至同步带结构的外部四角,一号同步带轮的中心轴固定连接至抱爪减速机的输出端,抱爪减速机的输入端连接至抱爪电机的输出轴,所述抱爪减速机、抱爪电机的驱动器、接近开关、压力传感器均信号连接至控制器。
10.进一步的,所述传输机构包括传输架、传输平皮带、主动滚筒、从动滚筒、反射传感器、2个防偏板、动力固定板和减速电机,所述传输架一侧还设有反射传感器,传输架顶部两侧分别安装主动滚筒、从动滚筒,主动滚筒、从动滚筒分别位于传输平皮带内部两端,主动滚筒的一端固定连接至减速电机的输出轴,减速电机通过动力固定板固定至传输架一侧,传输架两侧还分别设有防偏板,所述反射传感器、减速电机均信号连接至控制器。
11.相对于现有技术,本发明所述的一种坩埚装箱机械手设备具有以下优势:
12.(1)本发明所述的一种坩埚装箱机械手设备,设计合理,能够满足石英坩埚产品在线包装入箱工序,实现自动搬运坩埚,且将输送坩埚流水线与包装纸箱进行桥接,实现自动抓取坩埚,自动坩埚入箱,无需人工参与,研制出集机、电、气一体化的自动搬运设备;同时具有高精度、高刚性、高可靠性和精度保持稳定性等特点。
附图说明
13.构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
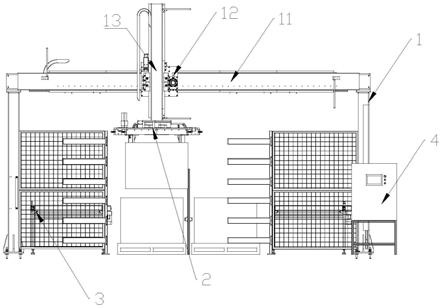
14.图1为本发明实施例所述的整结构正视图;
15.图2为本发明实施例所述的平移升降机构示意图;
16.图3为图2中a的放大图;
17.图4为本发明实施例所述的平移升降机构后视图;
18.图5为图4中b的放大图;
19.图6为本发明实施例所述的坩埚抱爪机构示意图;
20.图7为本发明实施例所述的局部坩埚抱爪机构俯视图;
21.图8为本发明实施例所述的传输机构示意图。
22.附图标记说明:
23.1、平移升降机构;11、机架;111、桁架;112、固定架;113、防护网;12、平移组件;121、平移减速机;122、平移电机;123、平移固定座;124、平移齿条;125、平移滑轨;126、平移滑块;13、升降组件;131、升降减速机;132、升降电机;133、升降齿条;134、升降齿轮;135、升降手臂;136、升降滑块;2、坩埚抱爪机构;21、抱爪固定架;22、同步带结构;23、抱爪减速机;24、抱爪电机;25、二号同步带轮;26、三号同步带轮;27、四号同步带轮;28、抱爪手臂;29、直线导轨;210、同步带惰轮;3、传输机构;31、传输架;32、传输平皮带;33、主动滚筒;34、从动滚筒;35、防偏板;36、动力固定板;37、减速电机;4、控制器。
具体实施方式
24.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
25.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
26.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
27.下面将参考附图并结合实施例来详细说明本发明。
28.如图1至图8所示,一种坩埚装箱机械手设备,包括平移升降机构1、坩埚抱爪机构2、传输机构3和控制器4,所述平移升降机构1包括机架11、平移组件12和升降组件13,所述机架11一侧设有控制器4,机架11内部两侧分别设有一个传输机构3,传输机构3上方设有坩埚抱爪机构2,所述坩埚抱爪机构2顶部可拆卸连接至升降组件13,升降组件13一侧连接至平移组件12,且平移组件12和升降组件13均滑动连接至机架11,所述平移组件12、升降组件13、坩埚抱爪机构2、传输机构3均信号连接至控制器4。所述控制器4为现有技术,可以为现有的plc或者单片机,本坩埚装箱机械手设备能够满足石英坩埚产品在线包装入箱工序,实现自动搬运坩埚,且将输送坩埚流水线与包装纸箱进行桥接,实现自动抓取坩埚,自动坩埚入箱,无需人工参与,研制出集机、电、气一体化的自动搬运设备;同时具有高精度、高刚性、高可靠性和精度保持稳定性等特点。
29.所述机架11包括桁架111、2个固定架112和4个防护网113,所述桁架111为条形结构,桁架111中部分别滑动连接至平移组件12和升降组件13,桁架111两端分别固定连接一个固定架112,且桁架111两端与2个固定架112是垂直设置,2个固定架112对称设置,2个固定架112均为矩形框架结构,每个固定架112内侧分别设有一个传输机构3,且2个传输机构3对称设置,每个固定架112上均安装2个防护网113,在本实施例里,平移升降机械手采用齿轮齿条为动力传输机构,采用直线导轨为导向机构,伺服电机、ab系列减速机为驱动力,每个固定架112上的2个防护网113呈直角设置,从而形成直角结构,这样2个直角结构就对称设置于远离桁架111一侧,从而便于保护工作人员的安全。
30.所述平移组件12包括平移减速机121、平移电机122、平移固定座123、平移齿条124、平移滑轨125、平移齿轮和平移滑块126,所述平移减速机121的输入端固定连接至平移电机122的输出轴,平移减速机121的输出端通过平移固定座123固定连接至平移齿轮,平移齿轮与平移齿条124啮合传动,平移齿条124固定至桁架111一侧,平移固定座123一侧通过4个平移滑块126滑动卡接至平移滑轨125,平移滑轨125固定住桁架111顶部,平移减速机121、平移电机122的驱动器均信号连接至控制器4,所述平移减速机121、平移电机122均为现有技术。平移滑轨125的型号为kgf304010,平移滑轨125的数量为10根,在实际使用时,工
作人员可以在桁架111上安装2条拖链,以便于各个制动部分走线缆,使得用电安全,降低危险事故的发生。
31.所述升降组件13包括升降减速机131、升降电机132、升降齿条133、升降齿轮134、升降手臂135和升降滑块136,所述升降减速机131的输入端固定连接至升降电机132的输出轴,升降减速机131的输出端通过平移固定座123固定连接至升降齿轮134,升降齿轮134与升降齿条133啮合传动,升降齿条133固定至升降手臂135一侧,升降手臂135底部可拆卸连接至坩埚抱爪机构2,升降手臂135两侧分别通过一个升降滑块136固定至平移固定座123,所述升降减速机131、升降电机132的驱动器均信号连接至控制器4,且升降手臂135与2个升降滑块136为滑动关系,所述升降减速机131、升降电机132均为现有技术,升降减速机131、平移减速机121的型号均可以为ab系列的减速机,升降电机132、平移电机122的型号均可以为2kw三协减速机。
32.所述坩埚抱爪机构2包括抱爪支架21、同步带结构22、抱爪减速机23、抱爪电机24、接近开关、压力传感器、一号同步带轮、二号同步带轮25、三号同步带轮26、四号同步带轮27、4个抱爪手臂28、4个直线导轨29和4个同步带惰轮210,所述抱爪支架21为十字架结构,抱爪固定架上方分别安装接近开关、压力传感器,抱爪支架21轴心上方设有升降连接板,抱爪支架21通过升降连接板可拆卸连接至升降手臂135,抱爪支架21轴心下方设有4个同步带惰轮210,4个同步带惰轮210呈正方形排布,且4个同步带惰轮210传动连接至同步带结构22中部,抱爪支架21内部四角还分别滑动一个直线导轨29,每个滑动导轨底部分别固定连接一个抱爪手臂28,每个滑动导轨一侧均与同步带结构22相连接,同步带结构22为闭环结构,一号同步带轮、二号同步带轮25、三号同步带轮26、四号同步带轮27分别传动连接至同步带结构22的外部四角,一号同步带轮的中心轴固定连接至抱爪减速机23的输出端,抱爪减速机23的输入端连接至抱爪电机24的输出轴,所述抱爪减速机23、抱爪电机24的驱动器、接近开关、压力传感器均信号连接至控制器4,在实际使用时,工作人员可以将4个同步带惰轮210分别逆时针命名为一号同步带惰轮、二号同步带惰轮、三号同步带惰轮、四号同步带惰轮,同步带结构22的一端传动连接至一号同步带轮,另一端依次通过一号同步带惰轮、二号同步带轮25、二号同步带惰轮、三号同步带轮26、三号同步带惰轮、四号同步带轮27、四号同步带惰轮后又回到一号同步带轮,这样的话,坩埚抱爪机构就可以以伺服电机为动力,伺服电机以直线滑轨为导向,通过同步带轮、同步带等带动抱爪机构运动从而完成抱埚运动。在本实施例里,所述压力传感器的数量为2个,压力传感器为现有技术,压力传感器的型号为dyz-101500kg,压力传感器的目的是辅助进行压力检测,保证坩埚抓取时牢固可靠。所述接近开关为现有技术,接近开关的型号为dw-ad-711-m8,所述抱爪减速机23、抱爪电机24均为现有技术,抱爪减速机23可以为纽仕达特减速机,抱爪减速机23的型号可以为ps90l2-30-p2-s2-msmd082g1v,抱爪电机24可以为伺三协电机,抱爪电机24的型号可以为mh75a2ln,所述直线导轨29的型号为hgf25ca2r660zocii,平移滑轨125的数量为4根。
33.所述传输机构3包括传输架31、传输平皮带32、主动滚筒33、从动滚筒34、反射传感器、2个防偏板35、动力固定板36和减速电机37,所述传输架31一侧还设有反射传感器,反射传感器为现有技术,反射传感器的型号为cx-491,在实际使用时,反射传感器可以与反光板配套使用,传输架31顶部两侧分别安装主动滚筒33、从动滚筒34,主动滚筒33、从动滚筒34分别位于传输平皮带32内部两端,这样在实际使用时,主动滚筒33远离减速电机37的一端、
从动滚筒34的两端均分别通过带座轴承安装至传输架31上,带座轴承的型号为hdhcp20,带座轴承的数量为3个,这样通过主动滚筒33、从动滚筒34的主动从而驱动传输平皮带32转动,主动滚筒33的一端固定连接至减速电机37的输出轴,减速电机37通过动力固定板36固定至传输架31一侧,传输架31两侧还分别设有防偏板35,在本实施例里,防偏板35为现有的可调节高度的挡块结构,所述反射传感器、减速电机37均信号连接至控制器4,传输机构3是以减速电机37为动力,主动滚筒33、从动滚筒34、轴承座等辅助,带动传输平皮带32完成传输坩埚工作。此机构具有特点:传输平稳。
34.实施例1
35.本设备是满足石英坩埚产品在线包装入箱工序,实现自动搬运坩埚,代替人工对坩埚进行装箱专用设备。此设备将输送坩埚流水线与包装纸箱进行桥接,实现自动抓取坩埚,自动坩埚入箱,无需人工参与。本设备采用新的设计理念,成功研制出集机、电、气一体化的自动搬运设备。同时具有高精度、高刚性、高可靠性和精度保持稳定性等特点。
36.本发明提供了一种坩埚装箱机械手设备包括:机架、平移升降机构、坩埚抱爪机构、传输机构构成。
37.设备动作说明
38.1.在触摸屏上可以实时监控坩埚位置和信息状态,通过触摸屏设定坩埚尺寸及设备各项运动参数。
39.2.传输机构将坩埚传输到预定位置后,机械手从待机位运动到取埚位置。
40.3.平移轴到位后,抓取机构往下运动,按照程序设定的参数运行到位后,抓取机构抓紧坩埚,当压力达到设定的值后,抓取机构自动检测坩埚是否已经抓取牢固。抓取机构提升到设定高度,平移轴往装箱工位开始运动。
41.4.运动到装箱工位后,升降轴向下运动,达到设定高度后抓取机构松开,将坩埚放置到纸箱内/不良品坩埚放置在周转车上。
42.5.将坩埚放到指定纸箱/周转车后升降抓取机构向上运行,运行到待机位置。
43.6.x、z抱爪等模组回到待机位,完成一次循环。
44.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1