学习模型生成方法、计算机程序、设定值决定装置、成型机和成型装置系统与流程
1.本发明涉及学习模型生成方法、计算机程序、设定值决定装置、成型机和成型装置系统。
背景技术:
2.专利文献1公开了由强化学习器决定耗电少的最佳操作条件、并调整操作条件的注射成型系统和机械学习器。
3.专利文献2公开了通过机械学习诊断注射成型机异常的异常诊断装置。
4.现有技术文献
5.专利文献
6.专利文献1:日本发明专利第6346128号公报
7.专利文献2:日本发明专利第6294268号公报
技术实现要素:
8.发明要解决的问题
9.但是,专利文献1的注射成型系统是通过强化学习决定涉及成型机的设定值的系统,存在需要庞大的训练数据或训练作业这一问题。对成型过程正确的模拟极为困难,需要使用了实机进行的成型控制、成型结果的确认作业。即使能够自动进行成型控制和成型结果的确认作业,也需要大量的树脂材料,在学习过程中同样会产生大量的缺陷品,现实情况下难以完成强化学习。
10.专利文献2的装置虽然能够进行注射成型的异常诊断,但是,不能决定成型机的最佳设定值。
11.本发明的目的在于提供学习模型生成方法、计算机程序、设定值决定装置、成型机和成型装置系统,其能够生成用于决定成型机的设定值的学习模型,而且能够削减学习模型学习所需的训练数据。
12.用于解决课题的手段
13.本发明的学习模型生成方法,其生成用于决定涉及成型机的设定值的学习模型,收集第一训练数据,该第一训练数据包含涉及所述成型机的所述设定值、在所述成型机进行了成型时测量涉及该成型的物理量得到的测量值、和在所述设定值被设定且得到所述测量值的状态下所述成型机生成的成型品的优劣程度;通过基于所收集的第一训练数据的机械学习,生成第一学习模型,该第一学习模型在输入了所述设定值和所述测量值的情况下,输出所述成型机生成的成型品的优劣程度;收集第二训练数据,该第二训练数据包含成型品的各缺陷类型的缺陷程度、所述测量值、以及在得到所述缺陷程度和所述测量值的状态下至少能降低所述缺陷程度的所述设定值或该设定值的变更量;通过基于所收集的第二训练数据和从所述第一学习模型输出的优劣程度的机械学习,生成第二学习模型,该第二学
习模型在输入了所述缺陷程度和所述测量值的情况下,输出至少能降低所述缺陷程度的所述设定值或该设定值的变更量。
14.本发明的计算机程序,,其用于使计算机生成用于决定涉及成型机的设定值的学习模型,所述计算机程序使所述计算机执行下述处理:收集第一训练数据,该第一训练数据包含涉及所述成型机的所述设定值、在所述成型机进行了成型时测量涉及该成型的物理量得到的测量值、和在所述设定值被设定且得到所述测量值的状态下所述成型机生成的成型品的优劣程度;通过基于所收集的第一训练数据的机械学习,生成第一学习模型,该第一学习模型在输入了所述设定值和所述测量值的情况下,输出所述成型机生成的成型品的优劣程度;收集第二训练数据,该第二训练数据包含成型品的各缺陷类型的缺陷程度、所述测量值、以及在得到所述缺陷程度和所述测量值的状态下至少能降低所述缺陷程度的所述设定值或该设定值的变更量;通过基于所收集的第二训练数据和从所述第一学习模型输出的优劣程度的机械学习,生成第二学习模型,该第二学习模型在输入了所述缺陷程度和所述测量值的情况下,输出至少能降低所述缺陷程度的所述设定值或该设定值的变更量。
15.本发明的设定值决定装置其生成用于决定涉及成型机的设定值的学习模型,并根据所生成的学习模型决定所述设定值,所述设定值决定装置包括:第一收集处理部,其收集第一训练数据,该第一训练数据包含涉及所述成型机的所述设定值、在所述成型机进行了成型时测量涉及该成型的物理量得到的测量值、和在所述设定值被设定且得到所述测量值的状态下所述成型机生成的成型品的优劣程度;第一学习处理部,其通过基于所述第一收集处理部收集的第一训练数据的机械学习,生成第一学习模型,该第一学习模型在输入了所述设定值和所述测量值的情况下,输出所述成型机生成的成型品的优劣程度;第二收集处理部,其收集第二训练数据,该第二训练数据包含成型品的各缺陷类型的缺陷程度、所述测量值、以及在得到所述缺陷程度和所述测量值的状态下至少能降低所述缺陷程度的所述设定值或该设定值的变更量;和第二学习处理部,其通过基于所述第二收集处理部收集的第二训练数据和从所述第一学习模型输出的优劣程度的机械学习,生成第二学习模型,该第二学习模型在输入了所述缺陷程度和所述测量值的情况下,输出至少能降低所述缺陷程度的所述设定值或该设定值的变更量。
16.本发明的成型机,包括:第一取得部,其取得成型机生产的成型品的各缺陷类型的缺陷程度;第二取得部,其取得在所述成型机进行了成型时测量涉及所述成型的物理量得到的测量值;和学习模型,其在输入了所述第一取得部取得的所述缺陷程度和所述第二取得部取得的所述测量值的情况下,输出在得到所述缺陷程度和所述测量值的状态至少能降低所述缺陷程度的涉及所述成型机的设定值,所述成型机,通过将所述第一取得部取得的所述缺陷程度和所述第二取得部取得的所述测量值输入所述学习模型,使所述设定值输出,根据输出的该设定值运转。
17.本发明的成型装置系统包括上述设定值决定装置和成型机。
18.发明的效果
19.如上所述,能够生成用于决定成型机的设定值的学习模型,而且能够削减学习模型学习所需的训练数据。
附图说明
20.图1是表示实施方式1的成型装置系统的结构例的框图。
21.图2是表示实施方式1的学习模型生成方法的流程图。
22.图3是表示第一学习模型的生成方法的示意图。
23.图4是表示第二学习模型的生成方法的流程图。
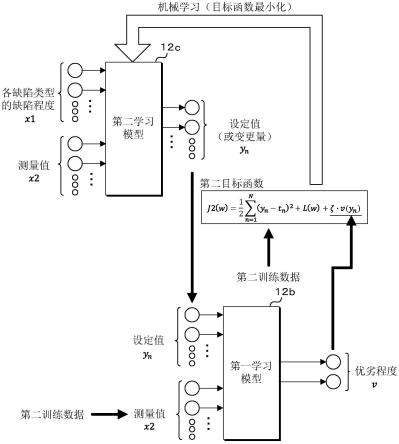
24.图5是表示第二学习模型的生成方法的示意图。
25.图6是表示实施方式2的成型机的框图。
26.图7是表示设定值决定方法的流程图。
27.图8是表示实施方式3的成型装置系统的框图。
28.图9是表示变形例的成型装置系统的框图。
具体实施方式
29.以下,参照附图说明本发明实施方式的学习模型生成方法、计算机程序、设定值决定装置、成型机和成型装置系统的具体例子。也可以任意组合以下记载的实施方式的至少一部分。此外,本发明并不限定为这些例示,而是由权利要求所示,包含与权利要求书等同的意思和范围内的所有变更。
30.(实施方式1)
31.图1是表示实施方式1的成型装置系统的结构例的框图。实施方式1的成型装置系统包括设定值决定装置1和成型机2。
32.成型机2例如为注射成型机、中空成型机、薄膜成型机、挤压机、双轴螺杆挤压机、纺丝挤压机、造粒机、镁注射成型机等。以下,在本实施方式1中说明的成型机2为注射成型机。注射成型机包括注射装置和配置在该注射装置的前方的合模装置。注射装置由加热料筒、在该加热料筒内设置成可在旋转方向和轴向上被驱动的螺杆、将该螺杆在旋转方向上驱动的旋转电机、和将螺杆在轴向上驱动的电机等构成。合模装置包括肘节机构和驱动该肘节机构的电机,肘节机构使模具开闭,在从注射装置射出的熔融树脂被填充到模具中时将模具夹紧,以使模具不会打开。
33.成型机2被设定规定成型条件的设定值,该成型条件为模具内树脂温度、喷嘴温度、料筒温度、料斗温度、合模力、射出速度、射出加速度、射出峰值压力、射出行程、料筒前端树脂压、止回环落座状态、保压切换压力、保压切换速度、保压切换位置、保压结束位置、缓冲位置、计量背压、计量转矩、计量完成位置、螺杆后退速度、循环时间、模具闭合时间、射出时间、保压时间、计量时间、模具打开时间等,成型机2按照该设定值运转。最佳的设定值因成型品而异。
34.设定值调整装置是计算机,包括运算部11、存储部12、输入接口13和输出接口14。运算部11具有cpu(central processing unit)、多核cpu、gpu(graphics processing unit)、gpgpu(general-purpose computing on graphics processing units)、tpu(tensor processing unit)、asic(application specific integrated circuit)、fpga(field-programmable gate array)、npu(neural processing unit)等运算回路、rom(read only memory)、ram(random access memory)等内部存储装置、i/o端子等。运算部11通过运行后述的存储部12存储的计算机程序12a,发挥本实施方式的设定值决定装置1的功
能。此外,设定值决定装置1的各功能部可以以软件方式实现,也可以是其一部分或全部以硬件的方式实现。
35.存储部12、输入接口13和输出接口14连接着运算部11。
36.此外,设定值决定装置1也可以是连接在未图示的网络上的服务器装置。
37.存储部12是硬盘、eeprom(electrically erasable programmable rom)、闪存等非易失性存储器。存储部12中存储有用于使计算机实施本实施方式1的学习模型生成方法的计算机程序12a。学习模型生成方法是决定成型机2的设定值以使成型品的优良品程度提高的方法。另外,存储部12存储用后述的模型生成方法生成的第一学习模型12b和第二学习模型12c。
38.本实施方式的计算机程序12a也可以是计算机可读取地记录在记录介质3中的形式。存储部12存储由未图示的读出装置从记录介质3读出的计算机程序12a。记录介质3是闪存等半导体存储器。另外,记录介质3也可以是cd(compact disc)-rom、dvd(digital versatile disc)-rom、bd(blu-ray(注册商标)disc)等光盘。记录介质3还可以是软盘、硬盘等磁盘、磁光盘等。另外,还可以从连接在未图示的通信网上的未图示的外部服务器下载本实施方式的计算机程序12a,并存储在存储部12中。
39.运算部11具有cpu(central processing unit)、多核cpu、gpu(graphics processing unit)、gpgpu(general-purpose computing on graphics processing units)、tpu(tensor processing unit)等处理器、rom(read only memory)、ram(random access memory)等内部存储装置、i/o端子等,该i/o端子上连接着存储部12、输入接口13和输出接口14。运算部11通过运行存储部12存储的计算机程序12a,生成用于决定成型机2的设定值的第一学习模型12b和第二学习模型12c。第一和第二学习模型12b、12c的生成方法将在后面详述。
40.输入接口13上连接着设定部1a、缺陷程度输入部1b和测量部1c。
41.设定部1a是用于手动输入规定成型机2的成型条件的设定值的接口。设定部1a例如为具有按钮、触摸面板等的操作面板。设定部1a将输入的设定值的数据向输入接口13输出。
42.缺陷程度输入部1b是用于按成型机2所成型的成型品的缺陷类型输入缺陷程度的接口。缺陷类型例如有缩痕、飞边、空隙等种类。缺陷程度是缺陷的程度、缺陷的发生率等。缺陷程度输入部1b例如为具有按钮、触摸面板等的操作面板,通过手动输入接受缺陷程度。缺陷程度输入部1b将输入的各缺陷类型的缺陷程度的数据向输入接口13输出。另外,缺陷程度输入部1b也可以包括例如拍摄成型品的照相机、以及通过分析由该照相机拍摄的图像来算出各缺陷类型的缺陷程度的图像分析处理器。该缺陷程度输入部1b将通过图像分析得到的各缺陷类型的缺陷程度的数据向输入接口13输出。
43.测量部1c是成型机2进行了成型时测量涉及该成型的物理量的装置。测量部1c将通过测量处理得到的物理量数据向设定值决定装置1输出。物理量有温度、位置、速度、加速度、电流、电压、压力、时间、图像数据、转矩、力、应变、耗电等。
44.由测量部1c测量的信息例如包含成型品信息、成型条件(测量值)、外围设备设定值(测量值)、气氛信息等。该外围设备是构成与成型机2连动的系统的设备,包含合模装置或模具。外围设备例如为成型品取出装置(机器人)、嵌件插入装置、镶件插入装置、模内转
印的送膜装置、拉带成型用拉带输送装置、气辅成型用气体注入装置、使用了超临界流体的发泡成型用的气体注入装置和长纤维注入装置、lim成型用材料混合装置、成型品的去飞边装置、流道切断装置、成型品测重计、成型品强度测试机、成型品的光学检查装置、成型品摄像装置和图像处理装置、成型品搬运用机器人等。
45.成型品信息包含例如拍摄成型品得到的照相机图像、由激光位移传感器得到的成型品的变形量、由光学测量仪得到的成型品的色度、亮度等光学测量值、由测重计测量出的成型品的重量、由强度测量器测量出的成型品的强度等信息。成型品信息表现了成型品是否正常、缺陷类型、缺陷的程度。
46.成型条件包含用温度计、压力计、速度测定器、加速度测定器、位置传感器、计时器、测重计等测量得到的模具内树脂温度、喷嘴温度、料筒温度、料斗温度、合模力、射出速度、射出加速度、射出峰值压力、射出行程、料筒前端树脂压、止回环落座状态、保压切换压力、保压切换速度、保压切换位置、保压结束位置、缓冲位置、计量背压、计量转矩、计量结束位置、螺杆后退速度、循环时间、模具闭合时间、射出时间、保压时间、计量时间、模具打开时间等信息。
47.外围设备设定值包含用温度计、计量器等测量得到的被设定为固定值的模具温度、被设定为变动值的模具温度、粒供给量等信息。
48.气氛信息包含用温度计、湿度计、流量计等得到的气氛温度、气氛湿度、有关对流的信息(雷诺数等)等信息。
49.除此之外,测量部1c也可以测量模具打开量、回流量、拉杆变形量、加热器加热率。
50.测量部1c将通过测量处理得到的测量值的数据向输入接口13输出。
51.输出接口14上连接着成型机2。输出接口14将由运算部11通过运算处理算出的设定值的数据向成型机2输出。设定值为规定射出速度、射出行程、料筒温度、合模力、保压时间等成型条件的值。
52.图2是表示实施方式1的学习模型生成方法的流程图。设定值决定装置1的运算部11执行生成用于决定涉及成型机2的设定值的学习模型的学习模型生成方法。
53.运算部11收集用于使第一学习模型12b学习的第一训练数据,第一学习模型12b能够对成型品的优劣进行判定或分类(步骤s11)。
54.第一训练数据包含涉及成型机2的设定值、在成型机2进行了成型时测量涉及该成型的物理量得到的测量值、和在设定值被设定且得到测量值的状态下成型机2生成的成型品的优劣程度。
55.成型品的优劣程度可以是用(1,0)等二值表示优良品和缺陷品的数据,也可以是用数值表示成型品的品质程度的数据。成型品的优劣程度也可以根据从缺陷程度输入部1b输出的缺陷程度算出。
56.第一训练数据可以通过从一个成型机2取得设定值、测量值和优劣程度的数据并存储在存储部12来收集,也可以汇总从多个成型机2得到的设定值、测量值和优劣程度的数据。另外,还可以通过取得在外部的服务器或存储装置中蓄积的设定值、测量值和优劣程度的数据来收集第一训练数据。
57.图3是表示第一学习模型12b的生成方法的示意图。在步骤s11的处理中收集了第一训练数据的运算部11,通过基于所收集的第一训练数据的机械学习,生成第一学习模型
12b,该第一学习模型12b在输入了设定值和测量值的情况下,输出在该设定值被设定且得到该测量值的状态下成型机2生成的成型品的优劣程度(步骤s12)。
58.第一学习模型12b是输出例如成型品为优良品的概率和所述成型品为缺陷品的概率的分类型神经网络(机械学习器)。第一学习模型12b包括输入层、隐藏层和输出层。
59.输入层具有分别被输入规定成型条件的多个项目的设定值的多个节点和分别被输入多个项目的测量值的多个节点。
60.隐藏层包括多个具有多个节点的中间层,输入侧的中间层的节点与输入层的节点相连。各节点的激活函数例如为sigmoid函数、双曲正切函数、relu函数、leaky relu函数。此外,也可以将隐藏层的一部分作为丢弃(dropout)层。
61.输出层具有输出成型品为优良品的概率的节点和输出所述成型品为缺陷品的概率的节点。输出层的各节点与输出侧的中间层的节点相连。
62.运算部11通过使用了第一训练数据的误差反向传播算法、误差梯度下降法等优化第一学习模型12b的权重系数,使第一学习模型12b进行机械学习。具体来说,运算部11调整权重系数,以使下述式(1)表示的第一目标函数最小化。
[0063][0064]
其中:
[0065]
j1(w)为第一目标函数;
[0066]
w为权重系数;
[0067]
vn为从第一学习模型输出的优劣程度
[0068]
vtn为目标输出(优劣程度的训练数据)
[0069]
l(w)为权重衰减项。
[0070]
接下来,运算部11收集使第二学习模型12c进行学习的第二训练数据,第二学习模型12c能够输出能降低缺陷程度的设定值或该设定值的变更量(步骤s13)。
[0071]
第二训练数据包含成型品的各缺陷类型的缺陷程度、测量值、在得到该缺陷程度和测量值的状态下至少能降低缺陷程度的设定值或该设定值的变更量。
[0072]
第二训练数据可以通过从一个成型机2取得各缺陷类型的缺陷程度、测量值、和能降低缺陷程度的设定值或变更量的数据并存储在存储部12中进行收集,也可以汇总从多个成型机2得到的设定值、测量值和设定值或变更量。另外,还可以通过取得在外部的服务器或存储装置中蓄积的设定值、测量值和设定值或变更量的数据来收集第二训练数据。
[0073]
接下来,通过基于所收集的第二训练数据和从第一学习模型12b输出的优劣程度的机械学习,生成第二学习模型12c,第二学习模型12c在被输入了缺陷程度和测量值的情况下,输出至少能降低缺陷程度的设定值或该设定值的变更量(步骤s14)。
[0074]
图4是表示第二学习模型12c的生成方法的流程图,图5是表示第二学习模型12c的生成方法的示意图。第二学习模型12c是输出设定值或所述变更量的循环神经网络(机械学习器)。第二学习模型12c包括输入层、隐藏层和输出层。
[0075]
输入层具有按缺陷类型被输入缺陷程度的多个节点和分别被输入多个项目的测量值的多个节点。
[0076]
隐藏层包括多个具有多个节点的中间层。隐藏层的结构是与第一学习模型12b的
隐藏层同样的结构。输入侧的中间层的节点与输入层的节点相连。
[0077]
输出层具有输出规定成型条件的各个项目的设定值、或该设定值的变更量(调整量)的多个节点。输出层的各节点与输出侧的中间层的节点相连。
[0078]
运算部11使第二训练数据所含的缺陷程度和测量值输入学习中的第二学习模型12c(步骤s31)。然后,运算部11将基于机械学习中的第二学习模型12c输出的设定值或变更量的设定值和第二训练数据所含的测量值输入第一学习模型12b(步骤s32)。
[0079]
在步骤s33中,运算部11通过使用了第二训练数据和从第一学习模型12b输出的优劣程度的数据的误差反向传播算法、误差梯度下降法等,优化第二学习模型12c的权重系数,由此使第二学习模型12c进行机械学习。具体来说,运算部11调整权重系数,以使下述式(2)表示的第二目标函数最小化。
[0080][0081]
其中:
[0082]
j2(w)为第二目标函数;
[0083]
w为权重系数;
[0084]yn
为从第二学习模型输出的设定值(或变更量);
[0085]
tn为目标输出(设定值的训练数据);
[0086]
l(w)为权重衰减项;
[0087]
ζ为参数;
[0088]
v(yn)为从第一学习模型输出的优劣程度。
[0089]
由上述式(2)可知,用于生成第二学习模型12c的第二目标函数,是从第二学习模型12c输出的设定值或变更量与第二训练数据所含的设定值或变更量的差越小、从第一学习模型12b输出的优劣程度表示的优良品的程度越高或缺陷的程度越低则值越小的函数。
[0090]
更具体地说,第二目标函数除了具有通常的误差项和权重衰减项之外,还具有惩罚项。惩罚项是从第一学习模型12b输出的优劣程度表示的缺陷品的程度越高则值越大的函数。另外,惩罚项具有确定所述值相对于所述优劣程度的变化率的参数。惩罚项为该函数乘以参数而成的结构。
[0091]
结束了步骤s33的处理的运算部11判定基于第二训练数据的第二学习模型12c的机械学习是否已完成(步骤s34)。在判定为第二学习模型12c的机械学习未完成的情况下(步骤s34:否),运算部11将处理返回步骤s31,继续第二学习模型12c的机械学习。在判定为第二学习模型12c的机械学习已完成的情况下(步骤s34:是),运算部11结束第二学习模型12c的生成处理。
[0092]
接下来,运算部11将使用通过步骤s11~步骤s14的处理学习了的第二学习模型12c算出的设定值的数据通过输出接口14向成型机2输出,成型机2使用第二学习模型12c的输出进行成型(步骤s15)。
[0093]
接下来,运算部11将处理返回步骤s11,以下同样地使第一学习模型12b和第二学习模型12c进行机械学习。即,运算部11在步骤s11中收集通过步骤s15的成型得到的第一训练数据,通过基于收集得到的第一训练数据的机械学习,使第一学习模型12b进行机械学
习。然后,利用学习后的第一学习模型12b的输出,使第二学习模型12c进行机械学习。
[0094]
此外,对返回步骤s11使第一学习模型12b和第二学习模型12c进行机械学习的时机,不做特别限定。例如,运算部11可以每次进行成型都返回步骤s11,也可以在步骤s15中进行了规定次数的成型之后将处理返回步骤s11。另外,运算部11也可以根据第一训练数据和第二训练数据的收集状况,在不同的时机使第一学习模型12b和第二学习模型12c进行机械学习。
[0095]
如上所述,按照本实施方式1,使用具有惩罚项的第二目标函数使第二学习模型12c进行学习,因此,能够生成用于决定成型机2的设定值的学习模型,而且能够削减学习模型学习所需的训练数据。
[0096]
第二学习模型12c的学习所需的设定值被限定为至少能降低缺陷程度的设定值,但是,对于第一学习模型12b,能够与缺陷程度无关地使用所有成型数据使之学习,因此,能够有效活用实时取得的所有成型数据。
[0097]
另外,也可以使第一学习模型12b和第二学习模型12c依次相互学习,还可以将任一学习模型仅用于推理,仅使另一学习模型进行学习。
[0098]
(实施方式2)
[0099]
实施方式2的学习模型生成方法、计算机程序、设定值决定装置、成型机,在设定值决定装置201设于成型机202这一点上不同于实施方式1,因此,以下主要说明上述区别。其它的结构和作用效果与实施方式1相同,因此,对应的部位标注同样的附图标记,详细说明从略。
[0100]
图6是表示实施方式2的成型机202的框图。本实施方式2的成型机202包括注射装置221、配置在该注射装置221的前方的合模装置222、和控制成型机202的运转的控制装置220。控制装置220包括本实施方式1中说明的设定值决定装置201。
[0101]
图7是表示设定值决定方法的流程图。以下的处理是在生成第一和第二学习模型12b、12c之后设定值决定装置201和成型机202的控制装置220执行的处理。设定值决定装置201从缺陷程度输入部1b取得各缺陷类型的缺陷程度(步骤s251)。另外,设定值决定装置201从测量部1c取得测量值(步骤s252)。
[0102]
设定值决定装置201将在步骤s251和步骤s252中取得的缺陷程度和测量值向第二学习模型12c输入(步骤s253),将从第二学习模型12c输出的设定值对成型机202设定(步骤s254)。成型机202的控制装置220根据由设定值决定装置201决定和设定的设定值进行成型控制(步骤s255)。
[0103]
按照实施方式2的成型机202,成型机202自身能够进行第一学习模型12b和第二学习模型12c的机械学习,决定能够使缺陷程度降低的设定值,并根据所决定的设定值运转。
[0104]
(实施方式3)
[0105]
实施方式3的学习模型生成方法、计算机程序、设定值决定装置、成型机和成型装置系统,在设定值决定装置301设于成型机302外部的服务器装置304这一点上不同于实施方式1,因此,以下主要说明上述区别。其它的结构和作用效果与实施方式1相同,因此,对应的部位标注同样的附图标记,详细说明从略。
[0106]
图8是表示实施方式3的成型装置系统的框图。本实施方式3的成型装置系统包括可相互通信的成型机302和服务器装置304。
[0107]
成型机302包括注射装置321、配置在该注射装置321的前方的合模装置322、和控制成型机302的运转的控制装置320。控制装置320包括取得从缺陷程度输入部302b输出的各缺陷类型的缺陷程度的第一取得部320a、取得从测量部302c输出的测量值的第二取得部320b、取得从设定部302a输出的设定值的第三取得部320c、和与服务器装置304发送接收各种信息的通信部320d。
[0108]
通信部320d将设定值调整装置运转所需的缺陷程度、测量值和设定值等的数据向服务器装置304发送。通信部320d向服务器装置304请求能降低缺陷程度的设定值,并接收服务器装置304响应请求发送的设定值。控制装置320根据所接收的设定值进行成型控制。
[0109]
服务器装置304包括设定值调整装置、和与成型机302发送接收各种信息的通信装置304a。设定值调整装置具有与实施方式1的设定值调整装置同样的结构。但是,实施方式3的设定值调整装置,在用通信装置304a接收上述缺陷程度、测量值、设定值等的数据并用通信装置304a将所决定的设定值向成型机302发送这一点上,不同于实施方式1。
[0110]
按照实施方式3的成型装置系统,成型机302用通信部320d将第一和第二学习模型12b、12c的生成所需的缺陷程度、测量值、设定值等的数据向服务器装置304发送。服务器装置304用通信装置304a接收从成型机302发送的该数据。设定值决定装置301将用通信装置304a接收的数据作为第一训练数据和第二训练数据蓄积或收集。然后,设定值决定装置301根据所收集的第一和第二训练数据生成第一和第二学习模型12b、12c。
[0111]
另一方面,在服务器装置304方面完成了第一和第二学习模型12b、12c的生成之后,成型机302能够向服务器装置304请求设定值。具体地说,成型机302用通信部320d将各缺陷类型的缺陷程度和测量值向服务器装置304发送。服务器装置304用通信装置304a接收缺陷程度和测量值。设定值决定装置301通过将通信装置304a接收的各缺陷类型的缺陷程度和测量值向第二学习模型12c输入,使其输出设定值或该设定值的变更量。服务器装置304将从第二学习模型12c输出的设定值或变更量用通信装置304a向成型机302发送。成型机302用通信部320d接收该设定值或变更量,将基于所接收的设定值或变更量的设定值对自身进行设定,进行成型控制。
[0112]
按照实施方式3的成型装置系统,能够由服务器装置304生成第一和第二学习模型12b、12c,能够将能降低缺陷程度的设定值向成型机302发送。此外,实施方式3的学习模型生成方法、计算机程序12a、设定值决定装置301、成型机302和成型装置系统能够实现与实施方式1同样的效果。
[0113]
(变形例)
[0114]
图9是表示变形例的成型装置系统的框图。在上述实施方式3中,采用了从服务器装置304向成型机302发送设定值的结构,但也可以是向成型机302分发所生成的第二学习模型320e的结构。
[0115]
成型机302的控制装置320用通信部320d接收服务器装置304分发的第二学习模型320e并存储。成型机302将由第一取得部320a取得的各缺陷类型的缺陷程度和由第二取得部320b取得的测量值输入第二学习模型320e,将基于从第二学习模型320e输出的设定值或变更量的设定值对自身进行设定,进行成型控制。
[0116]
变形例的学习模型生成方法、计算机程序12a、设定值决定装置301、成型机302和成型装置系统也能实现和图8所示的成型装置系统同样的效果。
[0117]
附图标记说明
[0118]
1 设定值决定装置
[0119]
1a 设定部
[0120]
1b 缺陷程度输入部
[0121]
1c 测量部
[0122]
2 成型机
[0123]
3 记录介质
[0124]
11 运算部
[0125]
12 存储部
[0126]
12a 计算机程序
[0127]
12b 第一学习模型
[0128]
12c 第二学习模型
[0129]
13 输入接口
[0130]
14 输出接口
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1