一种基于无人机的太阳能光伏板板面顽固污垢的清洗方法及系统与流程
1.本发明属于太阳能光伏板发电技术领域,具体涉及一种基于无人机的太阳能光伏板板面顽固污垢的清洗方法及系统。
背景技术:
2.光伏发电由于其环保及可再生优势,近年来得到广泛应用并迅猛发展。太阳能电池板是光伏发电系统的核心组件之一,一般采用串联和并联方式将其组成太阳能电池板阵列,安装在户外接收太阳光并产生电能,其受光效率很大程度上决定着光伏发电系统的发电效率。
3.太阳能光伏面板上的顽固污垢(虫胶、鸟粪等有机污染、微生物污染等)是光伏板清洗方面的一大难点,目前行业内采用的常规清洗技术很难将其高效清除,影响着光伏板透光性,并降低光电转换效率。严重情况下会导致热斑效应,大大威胁着光伏板运行安全。
4.大型太阳能光伏电站往往分布在空旷且人烟稀少地带,太阳能电池板放置于裸露环境中,经受风沙、冰霜雨雪等严苛考验,导致表面积累大量污垢,严重影响着其透光性,降低光电转换效率。其中有一部分光伏电站位于湖面、滩涂、山地、丘陵地带。位于湖面的光伏板受环境影响,人工清污困难且存在很大危险性;位于山地的光伏板由于依地势而建,高低起伏不平,也很不利于人工清污。此外,太阳能电池板光电转换过程中热量一时难以散失而致使其表面温度急剧升高,亦降低其光电转换效率。以往人工除污和自动器械除污系统仍存在以下问题:
5.1)人工除污费时费力,间隔时间长;且随着人力成本提升,大量采用人工除污会导致发电成本增加;
6.2)现有除污系统主要针对单块太阳能电池板,且需安装在太阳能电池板阵列周围或者其支架上,对太阳能电池板阵列设计和安装有一定限制,不利于后期维护;
7.3)采用摩擦式除尘,易产生静电,划伤太阳能电池板表面,且作业效率低,不适用于大面积的太阳能电池板阵列;
8.4)采用高压水枪清洗,水量消耗大,不利于环境保护。
技术实现要素:
9.本发明的目的在于克服上述现有技术的缺点,提供一种基于无人机的太阳能光伏板板面顽固污垢的清洗方法及系统,以解决现有技术中太阳能光伏板板面上顽固污垢难以清理,人工清理难度大的问题。
10.为达到上述目的,本发明采用以下技术方案予以实现:
11.一种基于无人机的太阳能光伏板板面顽固污垢的清洗系统,包括无人机本体,无人机本体上设置有污垢定位系统;
12.无人机本体的下部连接有激光箱体,激光箱体的下部连接有清洗箱体;所述无人
机本体的下部至少连接有一个红外图像采集系统和可见光图像采集系统;
13.激光箱体内设置有激光控制器,激光控制器连接有激光器,激光器连接有光传输系统,所述光传输系统连接有激光臂,激光臂的前端在激光箱体的外部;
14.清洗箱体内设置有碳纤维氮气瓶和碳纤维液态二氧化碳瓶,碳纤维氮气瓶的出口端连接有氮气管路,碳纤维液态二氧化碳瓶的出口端连接二氧化碳管路,所述氮气管路上设置有第一电磁阀,所述二氧化碳管路上设置有第二电磁阀氮气管路的出口端和二氧化碳管路的出口端共同连接至伸缩喷杆,伸缩喷杆的出口端设置有旋转喷嘴,旋转喷嘴在清洗箱体的外部;
15.所述污垢定位系统、红外图像采集系统、可见光图像采集系统、激光控制器、第一电磁阀和第二电磁阀均连接至上位机。
16.本发明的进一步改进在于:
17.优选的,所述污垢定位系统为rtk。
18.优选的,所述激光器产生激光的波长范围为100nm~3000nm。
19.优选的,沿着氮气的输出方向,氮气管路在第一电磁阀前设置有减压阀。
20.优选的,所述减压阀的出口压力为0.3mpa~0.4mpa。
21.优选的,所述二氧化碳瓶的出口压力为1.75bar~2.08bar。
22.优选的,所述二氧化碳管路的外层包裹有聚氨酯保温层,二氧化碳管路的直径≥15mm。
23.优选的,所述无人机本体的下部设置有支架,所述红外图像采集系统和可见光图像采集系统设置在支架的外侧,激光箱体和清洗箱体设置在支架的内部。
24.优选的,所述激光臂在激光箱体中架装在电动铰座上,电动铰座和激光控制器连接。
25.一种基于无人机的太阳能光伏板板面顽固污垢的清洗系统的清洗方法,包括以下步骤:
26.步骤1,无人机在太阳能光伏板板面上进行巡检,污垢定位系统和红外图像采集系统确定污垢的位置,无人机停留在污垢的上方;
27.步骤2,上位机启动激光控制器,激光控制器控制激光器发射激光,激光通过光传输系统和激光臂对污垢输出激光,激光输出5~10s;
28.步骤3,上位机开启第一电磁阀,碳纤维氮气瓶输出氮气,输出2s后,上位机开启第二电磁阀,碳纤维液态二氧化碳瓶输出二氧化碳,旋转喷嘴将二氧化碳喷射到污垢上,直至污垢被清洗干净。
29.与现有技术相比,本发明具有以下有益效果:
30.本发明公开了一种基于无人机的太阳能光伏板板面顽固污垢的清洗系统,该系统在无人机本体上设置了污垢定位系统、激光箱体和清洗箱体;通过污垢定位系统定位污垢的具体位置后,通过激光箱体中的激光器对污垢发射激光,通过清洗箱体中的二氧化碳清洗污垢,该系统采用激光清洗协同二氧化碳雪清洗技术针对太阳能光伏板顽固污垢进行清洗,规避了激光清洗的长时间使用,同时二氧化碳雪清洗针对玻璃表面清洗具有很高效率。该系统相比已有的光伏板清污技术更节水、安全、高效快速;且本发明采用新型3d打印技术加工各个模块框架,以用来降低无人机负载重量,提高无人机飞行稳定,系统简单安全易操
作;顽固污垢的清除提高太阳能光伏板的光电转换率,避免热斑效应,大大提高光伏发电安全。
31.进一步的,该污垢定位系统为rtk,该系统可以实时提供太阳能光伏板污垢在制定坐标系中三维定位结果,并达到厘米级精度。
32.进一步的,激光器产生激光的波长范围大,能够满足多种污垢的需求。
33.进一步的,氮气管路在第一电磁阀和碳纤维氮气瓶之间设置有减压阀,使得氮气管路输出的氮气压强能够满足使用需求。
34.进一步的,二氧化碳管路的外层设置有聚氨酯保温层,减少喷出二氧化碳过程的温降。
35.进一步的,红外图像采集系统和可见光图像采集系统设置在支架的外侧,江光箱体和清洗箱体设置在支架的内部,保证各个仪器之间的工作过程不会相互干扰。
36.激光臂通过电动铰座实现其转动。
37.本发明还公开了一种基于无人机的太阳能光伏板板面顽固污垢的清洗系统的清洗方法,该方法先采用激光清洗技术将顽固污垢与光伏板表面剥离,再配合二氧化碳雪清污技术将残留污垢清扫干净。该方法提高了太阳能光伏板清洁效率,减小耗水量,简化清洁设备,降低综合成本,便于后期维护等具有重要意义。该方法相比现在太阳能光伏板表面的清洗技术,采用无人机清洗可以快速准确的发现顽固污垢的位置,并能及时达到污垢附近,对其定点清除用。无人机代替人工,不仅更安全,同时也大大提高了清洗的效率。避免了顽固污垢导致的热斑效应,提高了太阳能发电的安全性。
附图说明
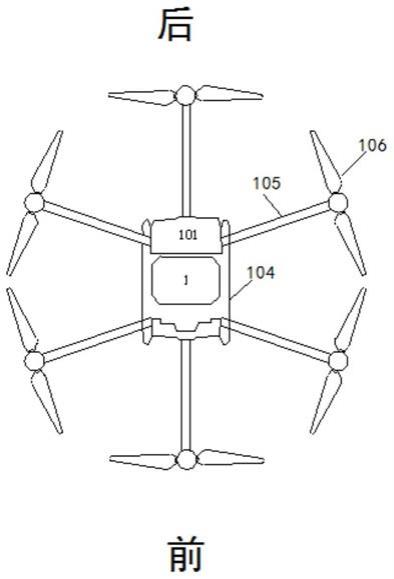
38.图1为本发明无人机的俯视图;
39.图2为本发明无人机的侧视图;
40.图3为本发明的清洗箱体内部结构示意图;
41.图4为本发明的二氧化碳雪清洗装置的结构示意图;
42.其中:1
‑
无人机本体;2
‑
激光清洗装置;3
‑
二氧化碳雪清洗装置;101
‑
污垢定位系统;102
‑
红外图像采集系统;103
‑
可见光图像采集系统;104
‑
中间部分;105
‑
折叠机臂;106
‑
螺旋桨;107
‑
支架;201
‑
激光控制器;202
‑
激光器;203
‑
光传输系统;204
‑
激光臂;205
‑
电控铰座;206
‑
激光箱体;301
‑
碳纤维氮气瓶;302
‑
碳纤维液态二氧化碳瓶;303
‑
第一电磁阀;304
‑
第二电磁阀;305
‑
减压阀;306
‑
氮气管路;307
‑
二氧化碳管路;308
‑
伸缩喷杆;309
‑
旋转喷嘴;310
‑
清洗箱体。
具体实施方式
43.下面结合附图对本发明做进一步详细描述:
44.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制;术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性;此外,除非另有明确的规定和限
定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
45.本发明公开了一种基于无人机的太阳能光伏板板面顽固污垢的系统,该系统包括无人机本体1、激光清洗装置2和二氧化碳雪清洗装置3,三个装置均和上位机连通。
46.无人机本体1包括中间部分104,为无人机的主体部分,沿其周向设置有六个折叠机臂105,六个折叠机臂105两两对称,有两个设置在中心线上,且相互对称,剩余四个折叠机臂105相对该中心线两两对称;所述折叠机臂105的内部和中间部分104一体连接,每一个折叠机臂105的外端部设置有螺旋桨106。中间部分104的下表面固定连接有支架107,整个无人机本体1为3d打印制成,重量轻。无人机本体1和上位机连接,接收上位机的指令进行位置的调整。
47.参见图1和图2,无人机本体1上设置有污垢定位系统101、红外图像采集系统和可见光图像采集系统103。
48.污垢定位系统101设置在中间部分104上,设定污垢定位系统101在中间部分104的后半部分,相对的方向为无人机本体1的前部分,后续均以此为基准,不再赘述。污垢定位系统101和上位机连通,能够实时向上位机传输整个无人机本体的位置。
49.红外图像采集系统102和可见光图像采集系统103均设置在中间部分104的下部,无人机本体1上至少设置有一个红外图像采集系统102和一个可见光图像采集系统103,优选的,红外图像采集系统102和可见光图像采集系统103均设置有两个,支架107的每一侧均设置有一个红外图像采集系统102和一个可见光图像采集系统103;方便采集污垢且能够控制成本。且红外图像采集系统102和可见光图像采集系统103均不接触支架107,红外图像采集系统102和可见光图像采集系统103均通过悬挂绳和中间部分104连接,防止无人机在喷射过程中因震动影响红外图像采集系统102和可见光图像采集系统103。红外图像采集系统102和可见光图像采集系统103均和上位机连接,实时传输图像。
50.所述的污垢定位系统101为rtk(real time kinematic)厘米级定位模块,该定位模块基于载波相位观测的实时动态定位技术,可以实时提供太阳能光伏板污垢在制定坐标系中三维定位结果,并达到厘米级精度。
51.所述的红外图像采集系统102包括连接的第一影像传感器和红外摄像机,红外摄像机用于拍摄光伏板污垢红外影像,对光伏板污垢点进行测温,第一影像传感器用于红外摄像机拍摄的污垢红外影像传递至上位机。
52.所述的可见光图像采集系统103包括连接的第二影像传感器和可见光相机,可见光用于记录光伏板污垢清洗过程,并通过第二影像传感器实时传输至上位机,使得操作人员便于监控。
53.参见图3,所述的激光清洗装置2包括激光控制器201、激光器202、光传输系统203、激光臂204、电动铰座205和激光箱体206。激光箱体206设置在中间部分104的下方,激光箱体206和中间部分104固定连接。
54.激光箱体206的后端设置有激光控制器201,激光控制器201的前端连接有激光器202,激光器202的前端连接光传输系统203,光传输系统改203的前端连接有激光臂204,激光臂204的前端穿过激光箱体206的前壁面,使得激光臂204的前端在整个激光箱体206的外
侧,发出激光。
55.所述激光臂204放置在所述光传输系统的出光口处,所述光传输系统203优选为光纤维,能够进行激光的传输。
56.所述激光器202、激光臂204和电动铰座204均与所述激光控制器201连接,上位机通过激光控制器201控制激光波长以及激光束的运动轨迹及焦点的位置。
57.所述激光器产生激光的波长范围为100nm
‑
3000nm。
58.参见图4,所述的二氧化碳雪清洗装置3包括碳纤维氮气瓶301、碳纤维液态二氧化碳瓶302、第一电磁阀303、第二电磁阀304、减压阀305、伸缩喷杆308、旋转喷嘴309和清洗箱体310。
59.清洗箱体310内设置有并排设置的碳纤维氮气瓶301和碳纤维液态二氧化碳瓶302,碳纤维氮气瓶301的出口和氮气管路306连通,氮气管路306上顺着氮气的流动方向依次设置有减压阀305和第一电磁阀303,由减压阀305减少氮气瓶输出的压力,由第一电磁阀303控制氮气的输出;碳纤维液态二氧化碳瓶302的出口和二氧化碳管路307连通,二氧化碳管路307上设置有第二电磁阀304,二氧化碳管路307的出口端和氮气管路306的出口端共同连接至伸缩喷杆308的入口端,伸缩喷杆308穿过清洗箱体310的前壁面,其出口端在清洗箱体310的外部,伸缩喷杆308的出口端设置有旋转喷嘴。第一电磁阀303、第二电磁阀304和减压阀305均和上位机连通,接收上位机通断的指令。
60.优选的,碳纤维液态二氧化碳气瓶压力为1.75bar~2.08bar。
61.优选的,碳纤维氮气瓶经减压阀305后的出口压力为0.3mpa~0.4mpa。
62.优选的,喷嘴氮气进口处最高温度为40℃。
63.优选的,喷杆中二氧化碳管路耐压指数在80以上,外层有聚氨酯保温层,管路直径最小为15mm。
64.所述的激光清洗控制装置、电磁阀等控制装置与所述无人机机身内部激光控制器集成于无人机控制手柄上。
65.一种基于无人机的太阳能光伏板板面顽固污垢的清洗方法是:当有鸟粪、虫胶等污垢覆盖在光伏板上方玻璃层时,会造成光伏板局部过热形成热斑,此时无人机对光伏板进行巡检,通过红外图像采集系统102和污垢定位系统101确定光伏板污垢具体位置信息,然后控制无人机悬停在污垢位置附近,启动激光清洗装置2,对准顽固污垢对其松动剥离,开启激光清洗装置5s~10s后,再同时开启二氧化碳雪清洗装置3,通过调整旋转喷嘴309,对准污垢进行清洗吹扫,可见光图像采集系统103实时拍摄记录清洗过程、并及时查看清洗效果;当前位置污垢清洗完成后,无人机根据rtk模块记录的污垢坐标,自动飞行至下一个污垢位置附近,继续进行两段清洗。
66.所述的二氧化碳雪清洗装置3中,碳纤维液态二氧化碳气瓶302的出口连接第二电磁阀304、第二电磁阀304出口连接二氧化碳管路307,氮气经过减压阀305后连接第一电磁阀303、第一电磁阀303出口连接氮气管路306。二氧化碳管路307的出口与氮气管路306的出口分别连接伸缩喷杆308的入口1与喷杆入口2,由于液态二氧化碳在喷射过程中发生相变,变成气体、气体和固体三相共存体系。液态二氧化碳是有机污垢的良好溶剂,当固态二氧化碳颗粒从物体表面剥离时,界面上的压力下降,液态二氧化碳重新固化,有机污垢被二氧化碳固体颗粒带离物体表面。
67.优选的,启动二氧化碳清洗装置时,在上位机上,先开启第一电磁阀303,使得氮气从伸缩喷嘴308中喷出,清洗管路中杂质气体;2s后,开启第二电磁阀304,使得液态二氧化碳输出;在伸缩喷嘴308处形成二氧化碳雪,并将二氧化碳雪喷射至已经化学分解的污垢上,直至污垢被彻底清除。
68.优选的,清洗结束后,先关闭第二电磁阀304,中断液态二氧化碳的输出,后关闭第一电磁阀303,彻底中断二氧化碳雪清洗装置。
69.优选的,二氧化碳雪清洗装置工作时间为10s~20s。
70.实施例一
71.无人机对光伏板进行巡检,通过红外图像采集系统102和污垢定位系统101确定光伏板污垢具体位置信息,然后控制无人机悬停在污垢位置附近1米内,将激光器202的面准光伏板上顽固污垢,调整波长为100nm,工作时间5s后,伸缩喷杆308伸展开来,使旋转喷嘴309处于无人机下风区域之外,然后启动电磁阀303,调节碳纤维氮气瓶减压阀305出口压力为0.4mpa使得氮气从喷嘴308中喷出,清洗管路中杂质气体;2s后,开启电磁阀304,使得液态二氧化碳输出;在旋转喷嘴309处形成二氧化碳雪,通过调整喷射角度后,准确的将二氧化碳雪喷射至即将松动剥落的污垢上,协同激光清洗光伏板表面顽固污垢。在清洗过程中,无人机红外相机102和可见光相机103对准污垢区域,拍摄记录整个两段清洗过程,并及时查看清洗效果。清洗结束后,先关闭电磁阀304,中断液态二氧化碳的输出,然后关闭电磁阀303,最后将伸缩喷管308收回彻底中断二氧化碳雪清洗装置。二氧化碳雪清洗装置工作时间为20s。根据rtk模块,无人机自动飞行至下一光伏板污垢位置。
72.实施例2
73.无人机对光伏板进行巡检,通过红外相机102和污垢定位系统101确定光伏板污垢具体位置信息,然后通过无人机感知系统104,控制无人机悬停在污垢位置附近1米内,将激光器面准光伏板上顽固污垢,调整波长为3000nm,工作时间5s后,伸缩喷杆308伸展开来,使旋转喷嘴309处于无人机下风区域之外,然后启动电磁阀303,调节碳纤维氮气瓶减压阀305出口压力为0.4mpa使得氮气从喷嘴308中喷出,清洗管路中杂质气体;2s后,开启电磁阀304,使得液态二氧化碳输出;在旋转喷嘴309处形成二氧化碳雪,通过调整喷射角度后,准确的将二氧化碳雪喷射至即将松动剥落的污垢上,协同激光清洗光伏板表面顽固污垢。在清洗过程中,无人机红外相机102和可见光相机103对准污垢区域,拍摄记录整个两段清洗过程,并及时查看清洗效果。清洗结束后,先关闭电磁阀304,中断液态二氧化碳的输出,然后关闭电磁阀303,最后将伸缩喷管308收回彻底中断二氧化碳雪清洗装置。二氧化碳雪清洗装置工作时间为15s。根据rtk模块,无人机自动飞行至下一光伏板污垢位置。
74.实施例3
75.无人机对光伏板进行巡检,通过红外相机102和污垢定位系统101确定光伏板污垢具体位置信息,然后通过无人机感知系统104,控制无人机悬停在污垢位置附近1米内,将激光器面准光伏板上顽固污垢,调整波长为1500nm,工作时间5s后启动电磁阀303,调节碳纤维氮气瓶减压阀305出口压力为0.3mpa使得氮气从喷嘴308中喷出,清洗管路中杂质气体;2s后,开启电磁阀304,使得液态二氧化碳输出;在喷枪308处形成二氧化碳雪,并将二氧化碳雪喷射至已经化学分解的污垢上,协同激光清除光伏板表面顽固污垢。在清洗过程中,无人机红外相机102和可见光相机103对准污垢区域,拍摄记录整个两段清洗过程,并及时查
看清洗效果。清洗结束后,先关闭先关闭电磁阀304,中断液态二氧化碳的输出,后关闭电磁阀303,彻底中断二氧化碳雪清洗装置。二氧化碳雪清洗装置工作时间为10s。根据rtk模块,无人机自动飞行至下一光伏板污垢位置。
76.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1