用于超声波清洁的转盘及其使用方法与流程
1.本技术涉及用于超声清洁工件的转盘(carousel)及其使用方法。
背景技术:
2.集成电路通过顺序沉积导电层、半导电层或绝缘层在基板上形成。在沉积一层之后,所述层被蚀刻以产生电路特征。随着一系列层被顺序地沉积和蚀刻,基板的外部或最上表面(即,基板的暴露表面)变得日益非平面。此非平面外表面被周期性地平坦化,以便为额外处理提供相对平坦的表面。化学机械抛光(cmp)是一种平坦化技术。该平坦化技术需要基板安装在承载头或抛光头上。基板的暴露表面靠着抛光垫放置。承载头提供可控的负载(即,压力)在基板上以将基板抵靠抛光垫推动,从而平坦化基板的非平面表面。
3.在任何所述cmp操作之后,必须清洁化学机械抛光工具的部件以从污染物去除颗粒和污染物。去除污染物的一种方法是通过将一个或多个部件浸入流体池中,并且用声波轰击部件以去除污染物。声波经由换能器(transducer)产生并且传播通过液体至位于保持流体的罐(tank)中的部件。声波会在部件附近引起气穴现象(cavitation),从而从部件中释放颗粒,诸如灰尘和油脂。
4.传统声波清洁器包括在清洁期间支撑cmp部件的支架(rack)或类似者。这些支架可衰减或吸收由超声波和/或兆频超声波(megasonic wave)传递的能量,从而降低声波清洁器的有效性和效率。此外,在传统清洁器中使用支架会产生“热点(hot spot)”,即部件表面的腐蚀或阳极氧化。这些热点是由传统的低频率换能器产生的不均匀功率密度造成的。传统的声波换能器会产生大气泡,所述气泡将过多的能量传递到部件上,从而腐蚀cmp部件上的表面涂层。此外,罐的角落可能会衰减或分散声波,这会阻止声波中的能量到达部件,导致部件的清洁效率低下。
5.因此,需要用于清洁cmp工具部件的改进装置。
技术实现要素:
6.本文披露了一种声波清洁插入件。在一实例中,声波清洁插入件包括被配置为围绕中心轴旋转的转盘。转盘还包括具有外周边的平台。平台围绕中心轴径向地设置。转盘具有内环和包围内环的外环。多个隔板(partition)将内环和外环耦接至平台。多个隔板围绕中心轴以预定角度布置。转盘进一步包括多个保持器。每个保持器由平台的一部分、内环和外环的每一者的一部分、以及由多个隔板形成的第一侧壁和第二侧壁形成。转盘被配置为浸入超声波振动流体中。
7.在本公开内容的另一实例中,提供了一种声波清洁系统。声波清洁系统包括具有内表面和外表面的罐。内表面被配置为包含能够传播声波的液体。多个声波换能器围绕罐的内表面径向地设置。声波清洁系统具有被配置为围绕中心轴旋转的转盘。转盘还包括具有外周边的平台。平台围绕中心轴径向地设置。转盘具有内环和包围内环的外环。多个隔板将内环和外环耦接至平台。多个隔板围绕中心轴以预定角度布置。转盘进一步包括多个保
持器。每个保持器由平台的一部分、内环和外环的每一者的一部分、以及由多个隔板形成的第一侧壁和第二侧壁形成。转盘被配置为浸入超声波振动流体中。
8.在又一实例中,披露了一种用于声波清洁的方法,所述方法包括围绕中心轴旋转转盘。转盘被设置在罐中并且进一步被配置为保持多个工件。方法还包括启动距中心轴一定距离的多个声波换能器,用于超声振动设置在罐内的流体。
附图说明
9.因此以其中可详细理解本公开内容的上述特征的方式,上文简要概述的本公开内容的更具体描述可参考实施方式获得,所述实施方式中的一些实施方式在附图中示出。然而,应注意,附图仅示出本公开内容的典型实施方式并且因此不视为限制本公开内容的范围,因为本公开内容可允许其他同等有效的实施方式。
10.图1是其中设置有转盘的超声波清洁系统的示意性侧视图。
11.图2示出图1中所示的转盘的一个实例的等轴视图。
12.图3示出图2中所示的转盘的替代实例的等轴视图。
13.图4a是图1至图3中所示的转盘的侧视图,所述转盘具有支撑多个工件的多个保持器。
14.图4b是如从图4a中的线b-b所示的转盘的底视图。
15.图5是利用图1至图4b中所示的转盘清洁多个工件的方法的流程图。
具体实施方式
16.本文披露了用于超声清洁cmp工件的转盘及其使用方法。cmp工件是cmp抛光工具的一部件,诸如抛光垫。不受限制地,抛光垫可以是带垫(belt pad)或抛光垫,工件也可以是cmp抛光工具的任何支撑抛光垫的部分,或者需要更换或日常维护的部分。
17.超声波清洁器包括一个填充有液体的罐,所述罐具有超声换能器,所述超声换能器被配置为产生通过液体传播的高频波(例如,声波)。如本文所披露的,将要清洁的一个或多个工件放入罐的液体中。保持一个或多个工件的转盘在罐内悬挂和旋转。因此,本公开内容的转盘不需要设置在罐内的可能降低清洁效率的支架和其他装置。因此,利用旋转转盘的罐内的流体增加了从超声换能器产生的波传递的能量的量。这样,实现了靠近工件的气穴现象增加。
18.例如由超声换能器产生高频声波,并通过液体传播到工件。声波会邻近于工件引起气穴现象,所述气穴从工件释放颗粒,诸如灰尘和油脂。有利地,本文披露的旋转转盘通过将声波朝向工件反射和/或将声波聚焦在工件上来减少罐中的能量损失,这样提高了超声波清洁系统的效率。在本文中应理解,约18khz至约350khz的频率可被认为是超声频率,并且高于350khz的频率被认为是兆频超声频率。
19.图1是其中设置有转盘104的超声波清洁系统100的示意性侧视图。超声波清洁系统100包括设置在罐108内的转盘104和多个超声换能器132。罐108具有一个或多个壁112,所述壁具有内表面114和与内表面114相对的外表面116。罐108具有耦接至一个或多个壁112的底部118。底部118能够支撑一个或多个超声换能器132。电源(未示出)向超声换能器132提供射频(rf)功率。罐108可以至少部分地填充有液体120,所述液体使得由超声换能器
132产生的超声波和/或兆频超声波能够传播。在一些实例中,液体120包括去离子水。在一些实例中,液体120包括一种或多种溶剂,诸如标准清洁1(standard clean1;sc1)的清洁溶液、选择性沉积去除试剂(sdr)、表面活性剂、酸、碱或用于从工件去除污染物和/或颗粒的任何其他化学品(如图2所示)。
20.转盘104可完全浸没在液体120中并被液体120包围。因此,转盘104可在罐108之内悬挂。例如,连接器128或类似装置可从支撑件124悬挂转盘104。连接器128可以包括各种皮带、绳索、链条、绳线和其他柔性联动装置。支撑件124可以是高架梁(overhead beam)、金属杆或类似的支撑件,连接器128可以附接到支撑件124上。在其他实例中,可以采用诸如螺钉、螺栓和联接器之类的其他装置来将转盘104悬挂在支撑件124和/或连接器128上。
21.电动机148通过连接器128耦接至转盘104。在一个实例中,连接器128是轴216(图2中详述)。电动机148被配置为以预定角速度在罐108内旋转转盘104。电动机148可以是向轴216提供扭矩,并由此使转盘104旋转的dc或ac电动机。电动机148可以包括转子、定子、轴承、绕组和诸如换向器(commutator)的其他部件。如图所示,电动机148与支撑件124相邻,但应理解,电动机148不限于所述位置并且可定位在沿连接器128、在连接器128上方或在连接器128下方的任何位置。在一些实例中,在不背离本公开内容的范围的情况下,电动机148可以浸没在液体120中。
22.转盘与液体120和连接器128直接接触。通过将转盘104悬挂在罐108之内,与传统超声波清洁器相比,更多的能量可在转盘104附近传递以清洁工件252(图2中所示)。例如,超声波和/或兆频超声波形式的更多能量可用于使转盘104附近的液体120形成气穴。
23.在一个实例中,通过将超声换能器132靠近罐108的内表面114定位,由超声换能器132发射的超声波和/或兆频超声波可以在罐108内传播并在支撑工件252的转盘104附近释放能量。例如,由超声换能器132发射的超声波和/或兆频超声波可从内表面114朝向转盘104反射。因此,由超声换能器132产生的超声波和/或兆频超声波在罐108的拐角处没有衰减。另外,来自超声波和/或兆频超声波的更多能量用于气穴产生。每一超声换能器132被配置为向液体120施加约900瓦和约1500瓦之间,诸如约1000瓦或约1150瓦的能量。在另一实例中,每一超声换能器132被配置为施加约1100瓦和约1350瓦之间,诸如约1250瓦或约1300瓦的能量。
24.换能器支撑件136将超声换能器132连接至罐108的内表面114。在一个实例中,换能器支撑件136可将超声换能器132从底部118升高偏移距离144,以在超声换能器132和底部118之间形成空间。偏移距离144可以在大约1英寸到大约5英寸之间,诸如大约2英寸或大约4英寸。在一些实例中,偏移距离144小于约0.5英寸。在另一实例中,偏移距离144实质上为零(0),以使得超声换能器132与底部118齐平安装。例如,每个超声换能器132可以用紧固件(例如螺栓或螺钉)固定到罐108的底部118。因此,在一些实例中,换能器支撑件136可以是用于固定超声换能器132的紧固件。超声换能器132和底部118的内表面114之间的空间可以将超声换能器132与罐108的壁112和底部118机械隔离。在另一实例中,底部118和超声换能器132之间的空间小于大约六英寸。然而,应当理解,在不背离本公开内容的范围的情况下可使用更大或更小的空间。
25.当被激活时,超声换能器132可以在液体120内产生超声波和/或兆频超声波。超声换能器132与工件252和转盘104之间的距离140是在清洁配方期间确定的,如下文更详细地
解释的。距离140包括每个超声换能器132的垂直(z)和水平(x和y)分量。壁112和底部118的内表面114上的每个超声换能器132的垂直分量和水平分量可以相同。或者,壁112和底部118的内表面114上的超声换能器132之间的垂直分量和水平分量可以不同。在另一实例中,在罐108的内表面114具有圆形圆周的情况下,由超声换能器132产生的波从内表面114向转盘104反射。因此,与传统的超声波清洁器相比,传送带104附近传送的能量更多。因此,本文披露的超声换能器132增加了靠近转盘104的罐108中的液体120的气穴产生。
26.罐108具有由半径150限定的周长p,所述半径150从延伸到罐108的内表面114的中心线152测量。在一个实例中,通过将每个超声换能器132从定位在罐108上的吊架(hanger)156悬挂而将一个或多个超声换能器132浸没在液体120中。吊架156可拆卸地耦接至超声换能器132。因此,每个超声换能器132具有由半径150限定的径向分量,使得每个超声换能器132能够沿周长p放置在任何位置。径向分量可以表示为角度θ或弧长s。例如,如果罐108是圆形,则罐108的周长p=2πr,其中r等于半径150。在另一个实例中,在罐108实质上是正方形的情况下,周长p被定义为4*w,其中w等于罐108的一侧的宽度。
27.在其他实例中,在罐108实质上不是正方形的情况下,周长p被定义为其中m等于罐108的内表面114的数量。在另一实例中,超声换能器132以径向等距角r
eq
定位,req≤n/p,其中n是超声换能器132的数量并且p是周长,如上文所定义的。在又一实例中,超声换能器132不是围绕罐108的内表面114等距布置,以使得弧长s小于周长p的长度并且大于给定超声换能器132的宽度,允许相邻超声换能器132之间的间隔或间隙。因此,布置超声换能器的角度θ大于s/r,以适应相邻超声换能器132之间的间隙且小于2π。
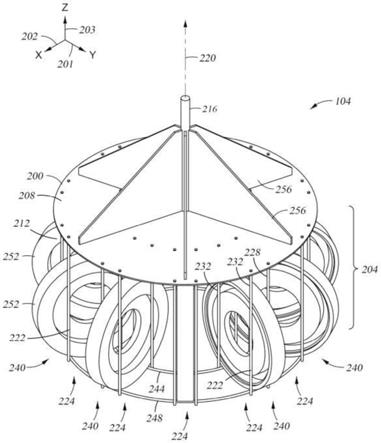
28.图2示出图1中所示的转盘104的一个实例的等轴视图。转盘104包括耦接至载体204的平台200,和耦接至平台200的多个支撑特征256。平台200具有上表面208和与上表面208相对的下表面212。载体204在负z轴方向203上从平台200的下表面212延伸。在一个实例中,可绕中心轴220旋转的轴216被配置为耦接至连接器128(图1)。在另一实例中,轴216与连接器128是一体的,如图1所示。轴216物理地耦接至平台200并且在电动机148运行时向轴216施加旋转扭矩。在一个实例中,轴216在平台200的208处终止。或者,轴216延伸穿过平台200的上表面208和下表面212,轴216保持与其耦接。在一个实例中,转盘104的中心轴220与罐108的中心线152实质上对齐。然而,应当理解,在其他实例中,中心线152和中心轴220在不背离如本文所描述的公开内容的各方面的情况下可以不对齐。
29.载体204包括多个保持器224、内环244和外环248。多个保持器224围绕中心轴220径向地延伸。多个保持器224中的每个保持器包括第一侧壁228和第二侧壁232。第一侧壁228和第二侧壁232各自包括多个隔板222中的一个或多个隔板222。每个保持器224由载体204一端上的平台200的下表面212界定。另外,每个保持器224由载体204的另一端上的内环244和外环248界定。内环244的直径小于外环248的直径,以使得外环248完全包围内环244。内环244和外环248被示为圆柱形环,但不限于所述形状。内环244和外环248的每一者都可以形成为圆形、四边形或正方形。
30.在所示的实例中,形成第一侧壁228和第二侧壁232的多个隔板222由棒或杆形成,所述棒或杆可以由金属、塑料、聚合物或其组合物制成。例如,由棒形成隔板222使得第一侧壁228和第二侧壁232在相邻隔板222之间均具有开口。每个保持器224由隔板222的实质上四边形布置形成,以使得具有六个边,其中五个边具有开口。第一侧壁228和第二侧壁232形
成在四边形布置的隔板222的相对侧,并且具有每个保持器224的最大开口。有利地,从换能器132发射的能量具有到每个工件252的直接视线(line of sight)路径。此外,多个隔板222将从换能器吸收的能量最小化,从而为气穴产生保存更多能量。为多个隔板选择的材料反射超声波和兆频超声波中的至少一种。
31.槽240由形成在内环244和外环248之间的空间或间隙限定,每个槽240具有在x轴方向201和y轴方向202上的尺寸。槽240进一步由沿y轴方向202延伸的第一侧壁228和第二侧壁232限定。槽240的长度由x-y平面中的内环244和外环248限定。x-y平面具有在x轴方向201和y轴方向202上的尺寸。槽240的宽度由第一侧壁228和第二侧壁232之间的距离限定。因此,在一个实例中,由内环244界定的槽240的宽度与由外环248界定的槽240的宽度相同。在另一实例中,由内环244界定的槽240的宽度小于由外环248界定的槽240的宽度。一个或多个工件252由多个保持器224保持在载体204内。每个工件252位于保持器224的槽240内。工件252部分地在由内环244和外环248形成的平面下方延伸,因为槽240内的空间/间隙使得工件252的一部分能够延伸穿过其中。
32.支撑特征256耦接至平台200的上表面208并在正z轴方向203上从所述上表面208延伸,并且在x-y平面中从中心轴220径向地延伸。如图所示,支撑特征256从轴216径向地延伸,并且在一个实例中,支撑特征256通过焊接耦接至轴216和/或平台200。在另一实例中,支撑特征256通过粘合剂或通过一个或多个固定构件(诸如螺栓、螺钉或其他合适的联接器)耦接至轴216和/或平台200。应当理解,平台200和载体204可以与上述实质上相同的方式与固定构件焊接或耦接。
33.图3示出了图2的超声波清洁系统100中所示的转盘104的替代实例的等轴视图。替代的转盘300具有从平台200的上表面208延伸穿过到下表面212的轴216。载体204在正z轴方向203上从平台200的上表面208延伸。当工件252设置在保持器224中时,每个工件252搁置在上表面208上。当转盘300旋转时,每个槽240将其各自的工件252保持在转盘300内,因为每个工件252的一部分延伸穿过隔板222中的开口。支撑特征256从平台200的上表面208沿正z轴方向203延伸到轴216。支撑特征256从中心轴220径向地延伸,以使得载体204围绕支撑特征256。
34.图4a是图1至图3中所示的转盘104的侧视图,描绘了用于支撑多个工件252的多个保持器224。载体204具有适合于容纳每个工件252的高度400,以使得当载体204如图2所示定向时,在工件252和载体204的顶部之间形成间隙404。或者,当载体204如图3所示定向时,间隙404在工件252与内环244和外环248之间。槽240被配置为随着转盘300旋转将每个工件252保持在保持器224内。因此,每个保持器224具有大于每个工件252的高度400和宽度。如上所述,槽240从而使每个工件252的一部分能够在内环244和外环248之间延伸到载体204下方。通过将每个工件252的一部分延伸到载体204的圆周之外,转盘使每个工件252和一个或多个超声换能器132之间的视线成为可能。保持视线能够实现有效的气穴产生,因为来自超声换能器132的更多能量被转移到液体120,并且最终在液体120中产生气穴。
35.图4b是如从图4a的线b-b线所见的多个保持器224的底视图。图4b是如从图4a中的线b-b所示的转盘的底视图。载体204具有足以容纳每个工件252的外径408,同时使工件252的至少一者的一部分能够延伸超过外环248的圆周。内环244具有内径412,以使得内环244的圆周使工件252的至少一个内部能够在内环244上朝向中心轴220延伸。以这种方式将工
件252延伸超过内环244和外环248使液体120能够更有效地围绕和穿过每个工件252循环,因为在与不期望被清洁的转盘104的表面碰撞之后液体中的能量损失更少。多个保持器224围绕载体204的中心轴220以角度420形成,以使得在每个工件252之间形成间隙416。间隙416和角度420是内径412和外径408的函数。因此,可以优化间隙416和角度420以促进工件252的清洁。在一个实例中,角度420小于或等于n/2π,其中n是工件252的数量。在一个实例中,角度420在大约15度和大约35度之间,诸如大约20度或大约25度。
36.图5是利用图1至图3中所示的转盘清洁多个工件的方法的流程图。在操作504处,多个工件在液体罐中旋转。在一个实例中,多个工件252设置在转盘104中。转盘104绕中心轴220旋转,从而使浸没在液体120中的工件252绕转盘104的中心轴220旋转。
37.方法500通过启动距工件一定距离的多个声波换能器以超声振动流体而进行到操作508。在一个实例中,超声换能器132被定位在距工件252的距离140处。距离140在大约8英寸和大约36英寸之间,诸如大约12英寸。在另一实例中,距离140介于约15英寸和约25英寸之间,诸如约24英寸或约20英寸。在又一实例中,距离140小于或等于约16英寸或小于约12英寸,或约10英寸。如上所述,安装到罐108的壁112或底部118的超声换能器132之间的距离140可以是等距的或具有不同的距离。在一个实例中,每个超声换能器132与转盘104的中心轴220之间的距离140是等距的。一个优点是当超声换能器132与转盘104的中心轴等距布置时,可以更快地实现共振频率。
38.在操作512处调整清洁配方的参数。清洁配方的参数可以包括换能器的频率、由换能器传输到流体的功率、流体的脱氧水平、工件的旋转速度和转盘旋转的持续时间。例如,超声换能器132从电源(未示出)接收功率,以使得超声换能器132以大约50khz和大约100khz之间,诸如大约55khz的频率振动。在另一实例中,多个超声换能器132以大约60khz和大约85khz之间,诸如大约70khz的频率振动。在另一实例中,超声换能器132以大约75khz和大约85khz之间,诸如大约80khz的频率振动。利用上述频率,每个空腔或气泡的尺寸变得更小,从而每个空腔赋予每个工件252更少的能量。因此,上文披露的频率能够清洁每个工件252,同时减少与传统超声波清洁器的较大气泡相关联的热点或阳极氧化的发生。
39.每个超声换能器132被配置为将大约750瓦和大约1500瓦之间的能量传递给液体120。在一个实例中,传递到液体120的能量在大约850瓦和大约1350瓦之间,诸如大约900瓦或大约950瓦。在另一实例中,传递到液体120的能量在大约1100瓦和大约1300瓦之间,诸如大约1150瓦,或大约1250瓦,或大约1275瓦。
40.在气穴产生期间,小的充满蒸汽的空腔可在液体120中形成,从而产生空腔,即气泡或空隙,其中液体120中的压力相对较低。当空腔坍缩(collapse)时,冲击波会在从每个空腔径向向外延伸的气泡附近产生。来自冲击波的能量从每个工件252去除颗粒。多个隔板222使得每个工件252的更大表面积能够暴露于液体120,以使得来自超声换能器132的能量被转移到气穴化并且从每个工件252去除颗粒。多个隔板222允许在超声换能器132中的至少一个和相应工件252的表面上的实质上每个点之间保持视线。传统的保持器需要每个工件和传统保持器之间有更多的表面接触,因此减少了可用于流体气穴产生的能量,并且从而降低了清洁过程的效率和有效性。
41.清洁配方包括流体的氧化参数。例如,液体120具有大约1ppb和大约20ppb之间,诸如大约15ppb的氧含量。在一个实例中,液体120的氧含量介于约5ppb和约15ppb之间,诸如
约7ppb或约10ppb。在又一实例中,液体120的氧含量小于或等于约10ppb,或小于或等于约5ppb。
42.转盘104的旋转速度介于约5rpm和50rpm之间,诸如约15rpm或20rpm。在另一实例中,转盘104在大约25rpm和大约40rpm之间,诸如以大约30rpm或大约35rpm旋转。通过改变每个工件252表面的气穴产生速率来调整旋转速度以优化工件252的清洁。转盘104可以旋转约10分钟至约60分钟,诸如约20分钟的持续时间。在另一实例中,转盘104旋转的持续时间在大约15分钟和大约45分钟之间,诸如大约25分钟。在另一实例中,持续时间在大约25分钟和大约35分钟之间。在另一实例中,持续时间在大约27分钟和大约33分钟之间,诸如大约30分钟。
43.在操作514处,通过使罐中的流体共振来去除来自工件的颗粒。清洁配方可包括共振模式,其中超声换能器132使液体120以液体120的固有频率或接近其固有频率共振。使液体120共振优化了传递到每个工件252的气穴产生的能量的速率。在液体120的共振期间,更多的能量从超声换能器132转移到每个工件252的表面。在可与上述其他实例组合的一个实例中,罐108的形状是圆形的。具有圆形形状的罐108使能量能够均匀地集中到转盘104上。此外,从转盘104向内表面114反射的能量被重新定向回到罐108和转盘104的中心。将能量反射回罐108的中心会增加液体120的功率密度,并且因此增加液体120的气穴产生速率和/或密度。应理解,罐108的形状不限于环形或圆形,并且所述形状可以是适合保持液体120的任何形状。然而,有利地,罐108的圆形形状消除了死区,即其中流体的功率密度显著降低而抑制了流体的气穴产生的流体容积,这是由于流体中的声波引起的干扰彼此抵消。
44.可执行可选操作516,其中确定每个工件的清洁度水平。每个工件都可以在液体粒子计数器(liquid particle counter,lpc)中进行测试,以确定工件的污染水平。如果每个工件的清洁度超过预定阈值,则方法500可以终止。如果一个或多个工件没有超过预定阈值,则操作516进行到操作504并且所述方法继续直到工件已经超过清洁度的预定阈值为止。
45.本文披露了用于超声清洁工件的转盘,及其使用方法的实例。有利地,利用转盘通过向工件反射声波来减少罐中的能量损失,从而提高超声换能器的清洁效率。虽然前述内容针对特定实例,但在不背离本公开内容的范围的情况下可以设计其他实例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1