一种智能喷涂机器人的制作方法
[0001]
本发明涉及农林机械技术领域,特别是涉及一种智能喷涂机器人。
背景技术:
[0002]
我国北方地区,冬季严寒、干燥多风,会使一些不太耐寒的树种在冬季至早春遭受冻害或造成“生理干旱”,使局部枝条枯干,轻则部分枝条受害,重则会全株死亡,为使树木安全越冬,必须了解低温危害的原因,并采取必要的措施,传统针对树木冻害的防治,使用石灰加石硫合剂对枝干涂白,可以减小向阳面皮部因昼夜温差过大而受到的伤害,并能杀死一些越冬的病虫害,涂白时间一般在10月下旬到11月中旬之间,不能拖延涂白时间,温度过低会造成涂白材料成片脱落,树干涂白后,减少了早春树体对太阳热能的吸收,降低了树温提升的速度,可使树体萌动推迟2-3d,从而有效防止树体遭遇早春回寒的霜冻。
[0003]
现有的大部分园林树干涂白技术不全面,以人工运用刷石灰浆的方式进行涂白,耗费人力物力,目前涂白喷涂设备不够完善,针对上述问题,在现有树木维护用树干涂白设备的基础上进行创新设计。
技术实现要素:
[0004]
为了解决上述技术问题,本发明的目的在于提供一种智能喷涂机器人,该喷涂机器人能够有效代替人工对树木进行涂白,喷涂效率更高,喷涂更加均匀,解决了大部分园林树干涂白技术不全面,以人工运用刷石灰浆的方式进行涂白,耗费人力物力的问题。
[0005]
为实现上述目的,本发明提供如下技术方案:一种智能喷涂机器人,包括喷涂模块、进给模块、移动模块和控制系统,所述喷涂模块包括喷头,六边形铝型材,开合丝杠,开合板,开合电机,光杠一,支撑板,支撑杆,电机固定块,固定于支撑板上的三角块一和固定于六边形铝型材上的三角块二;所述进给模块位于所述喷涂模块的下方,所述喷涂模块通过光杠一、支撑杆固定在所述进给模块上;所述进给模块通过制动滑块与所述移动模块的光杠二滑动连接;所述移动模块内部设有控制系统,所述控制系统通过螺钉固定在所述移动模块内;所述控制系统用以控制喷涂模块、进给模块和移动模块进行相应的操作。
[0006]
进一步地,所述喷头共四个,对称安装在所述六边形铝型材上,所述六边形铝型材与所述开合板铰接连接;所述开合丝杠通过联轴器与所述开合电机的输出轴相连接;所述开合板与所述开合丝杠的螺母固定连接;所述支撑板通过滑块与所述光杠连接;所述三角块一与所述三角块二的一端固定连接,所述三角块二的另一端与所述六边形铝型材铰接连接。
[0007]
进一步地,所述开合电机的一端通过电机固定块固定在所述支撑板上;所述开合电机的另一端滑动设置在在所述支撑杆上。
[0008]
进一步地,所述光杠的上方还设有直流电机,所述直流电机将动力传递给光杠,从而带动六边形铝型材上下移动。
[0009]
进一步地,所述进给模块包括进给滑块、进给支撑板、进给电机、进给丝杠和丝杠啮合块,所述进给支撑板为条形板,中间开设有条形槽,用以方便进给模块在所述移动模块上移动;所述进给滑块、进给电机、进给丝杠和丝杠啮合块位于所述进给支撑板的下方。
[0010]
进一步地,所述进给电机与所述进给丝杠相连,所述进给丝杠通过丝杠啮合块固定在所述进给支撑板上。
[0011]
进一步地,所述移动模块由12根3厘米铝型材紧固拼接而成;所述移动模块的底部框架上安装有储料罐、车轮、车轮电机和水泵,所述储料罐通过螺钉与固定杆相连;所述固定杆固定在所述底部框架上;所述车轮为四个,分别通过车轴与t型座相连,进而与车轮固定杆相连;所述车轮固定杆固定在所述底部框架上。
[0012]
进一步地,所述车轮电机通过螺钉与所述底部框架相连,用于为车轮提供动力;所述水泵共两个,通过螺钉固定在所述底部框架上;所述水泵通过管道分别与所述储料罐和所述喷头相连。
[0013]
进一步地,所述底部框架上还设有光杠二,所述光杠二位于所述车轮的左右两侧,所述光杠二通过光杠固定块固定在所述固定杆上。
[0014]
进一步地,控制系统包括电源模块、l298n电机驱动板,atemg 2560控制芯片、保险丝和无线通信模块;其中,电源模块为整个装置提供电力;控制系统用以控制智能喷涂机器人进行相应的操作。
[0015]
本发明的有益效果体现在:(1)本发明提供的智能喷涂机器人,通过开合电机可以有效控制六边形铝型材的开合大小,使之适用于喷涂不同粗细规格的树干。
[0016]
(2)本发明提供的智能喷涂机器人,通过移动模块可以控制喷涂模块伸出的长度,使之能够根据实际工作场景来调整机器人与树干的距离,环境适用性更强。
[0017]
(3)本发明提供的智能喷涂机器人,通过直流电机可以控制喷涂模块进行上下移动,在提高喷涂效率的同时,使喷涂更加均匀,避免造成涂料的浪费,节约了成本。
[0018]
(4)本发明提供的智能喷涂机器人,电源模块采用12v、5v聚合物锂电池组,自身具有短路保护功能,因外部发生短路保护而停止输出应解除短路及负载,电池组会自动恢复输出;为设备提供了良好的能源储备。
[0019]
(5)本发明提供的智能喷涂机器人,采用双h桥的直流电机驱动模块,可同时驱动两台电机,使信号可外接pwm,实现对电机的调速,不仅尺寸小,节约了很大一部分空间,而且可以长时间工作,使用寿命长,不易损坏。
[0020]
(6)本发明提供的智能喷涂机器人,控制系统采用atemg 2560控制芯片,能够高效的处理由无线通讯模块传来的通讯,相比于单片机更加稳定;采用hc-05主从一体蓝牙模块,该模块可直接与手机、电脑、平板等带有蓝牙功能的数码产品通讯,操作简单、使用方便。
附图说明
[0021]
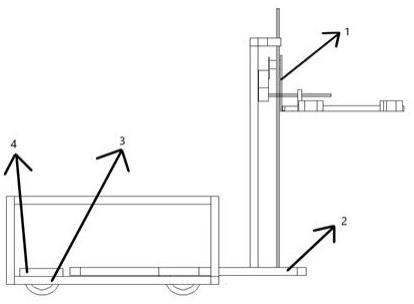
本发明上述的以及其他的特征、性质和优势将通过下面结合附图和实施例的描述而变的更加明显,其中:图1是本发明喷涂机器人的整体结构示意图。
[0022]
图2是喷涂机构的结构示意图。
[0023]
图3是喷涂机构中六边形铝型材的连接结构示意图。
[0024]
图4是进给模块的结构示意图。
[0025]
图5是移动模块的结构示意图。
[0026]
图6是本发明喷涂机器人的电气控制原理图。
[0027]
图中:1-喷涂模块、1-1-喷头,1-2-六边形铝型材,1-3-开合丝杠,1-4-开合板,1-5-开合电机,1-6-光杠一,1-7-支撑板,1-8-支撑杆,1-9-电机固定块,1-10-三角块一、1-11三角块二、2-进给模块、2-1-进给滑块、2-2-进给支撑板、2-3-进给电机、2-4-进给丝杠、2-5丝杠啮合块、3-移动模块、3-1-储料罐、3-2-车轮、3-3-车轮电机、3-4-水泵、3-5-底部框架、3-6-固定杆、4-控制系统。
具体实施方式
[0028]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0029]
本发明实施例中,一种智能喷涂机器人,结构如图1所示,包括喷涂模块1,进给模块2,移动模块3,控制系统4,其中,进给模块2位于喷涂模块1的下方,喷涂模块1通过光杠一1-6、支撑杆1-8固定在所述进给模块2上;进给模块2与移动模块3通过进给滑块2-1与光杠二3-9进行移动式固定,开合电机1-5通过螺钉与电机固定块1-9进行固定,并可沿支撑板上下移动,控制系统4利用螺钉与移动模块3进行固定。
[0030]
参照图2所示,喷涂模块包括喷头1-1,六边形铝型材1-2,开合丝杠1-3,开合板1-4,开合电机1-5,光杠一1-6,支撑板1-7,支撑杆1-8,电机固定块1-9,固定于支撑板上的三角块一1-10,固定于六边形铝型材上的三角块二1-11,在本实施例中,喷头1-1共四个,对称安装在所述六边形铝型材1-2上,所述六边形铝型材1-2与所述开合板1-4铰接连接;所述开合丝杠1-3通过联轴器与所述开合电机1-5的输出轴相连接;所述开合板1-4与所述开合丝杠1-3的螺母固定连接;所述支撑板1-7通过滑块与所述光杠1-6连接;所述三角块一1-10与所述三角块二1-11的一端固定连接,所述三角块二1-11的另一端与所述六边形铝型材1-2铰接连接参照图3所示。
[0031]
具体地,开合电机1-5的一端通过电机固定块1-9固定在所述支撑板1-7上;所述开合电机1-5的另一端滑动设置在在所述支撑杆1-8上。在开合电机1-5带动开合丝杠1-3旋转时,固定于支撑板上的三角块一1-10固定不动,固定于六边形铝型材上的三角块二1-11与六边形铝型材1-2一起由开合板1-4推着向前走,从而使得六边形铝型材1-2向外打开,反之,则实现六边形铝型材1-2闭合。
[0032]
另外,光杠1-6的上方还设有直流电机,直流电机将动力传递给光杠1-6,从而带动六边形铝型材1-2上下移动。
[0033]
在本实施例中,进给模块2包括进给滑块2-1、进给支撑板2-2、进给电机2-3、进给丝杠2-4和丝杠啮合块2-5,结构如图4所示,所述进给支撑板2-2为条形板,中间开设有条形槽,用以方便进给模块2在所述移动模块3上移动;所述进给滑块2-1、进给电机2-3、进给丝
杠2-4和丝杠啮合块2-5位于所述进给支撑板2-2的下方。
[0034]
其中,进给电机2-3与所述进给丝杠2-4相连,所述进给丝杠2-4通过丝杠啮合块2-5固定在所述进给支撑板2-2上。
[0035]
参照图5所示,移动模块3由12根3厘米铝型材紧固拼接而成;所述移动模块3的底部框架3-5上安装有储料罐3-1、车轮3-2、车轮电机3-3和水泵3-4,所述储料罐3-1通过螺钉与固定杆3-6相连;所述固定杆3-6固定在所述底部框架3-5上;所述车轮3-2为四个,分别通过车轴与t型座相连,进而与车轮固定杆3-8相连;所述车轮固定杆3-8固定在所述底部框架3-5上。
[0036]
所述车轮电机3-3通过螺钉与所述底部框架3-5相连,用于为车轮3-2提供动力;所述水泵3-4共两个,通过螺钉固定在所述底部框架3-5上;所述水泵通过管道分别与所述储料罐3-1和所述喷头1-1相连。
[0037]
具体地,底部框架3-5上还设有光杠二3-9,所述光杠二3-9位于所述车轮3-2的左右两侧,所述光杠二3-9通过光杠固定块3-10固定在所述固定杆3-6上。
[0038]
在本实施例中,控制系统4包括电源模块、l298n电机驱动板,atemg 2560控制芯片、保险丝和无线通信模块;其中,电源模块为整个装置提供电力;控制系统4用以控制智能喷涂机器人进行相应的操作。该喷涂机器人的电气控制原理,如图6所示。
[0039]
其中,电源模块:采用12v,5v聚合物锂电池组,自身具有短路保护功能,因外部发生短路保护而停止输出应解除短路及负载,电池组会自动恢复输出;为设备提供了良好的能源储备。
[0040]
保险丝:采用5*20玻璃保险管保险丝,玻璃管本体为透明玻璃钢可清晰见到内部的熔线,损坏后易观察,两端铜帽部分镀铬、导电良好的黄铜材料。
[0041]
l298n电机驱动板:采用双h桥的直流电机驱动模块,可同时驱动两台直流电机,使信号可外接pwm,实现对电机的调速,不仅尺寸小,节约了很大一部分空间,而且可以长时间工作,使用寿命长,不易损坏。
[0042]
atemg 2560控制芯片:高效的处理由无线通讯模块传来的通讯,相比于单片机来说更加稳定。
[0043]
无线通信模块:采用hc-05主从一体蓝牙模块,该模块可直接与手机、电脑、平板等带有蓝牙功能的数码产品通讯,操作简单、使用方便。
[0044]
本发明提供的智能喷涂机器人工作时,首先向储料罐3-1里加入涂料,然后将手机端的蓝牙串口与该控制系统4中的无线通信模块建立连接;然后通过预设程序进行识别目标,也可手动进行控制,通过蓝牙串口来下达命令给车轮电机3-3通电,车轮电机3-3驱动车轮移动,移至目标前再对进给滑块2-1通电,具体为驱动进给电机2-3带动进给丝杠2-4旋转,丝杠啮合块2-5带动将力传递给进给支撑板2-2,使进给支撑板2-2下方的进给滑块2-1在移动模块3的光杠二3-9上移动,从而实现喷涂模块1的伸出动作。然后为开合电机1-5通电,在开合电机1-5驱动开合丝杠1-3旋转,固定于支撑板上的三角块一1-10固定不动,固定于六边形铝型材上的三角块二1-11与六边形铝型材1-2一起由开合板1-4推着向前走,由于固定于支撑板上的三角块一1-10固定不动,将六边形铝型材1-2拉开,实现六边形铝型材1-2打开;待开合程度大于树干的直径时,控制喷涂模块1继续向前伸出,使得六边形铝型材1-2围绕在树干周围,然后给开合电机1-5通相反的电流,使开合电机1-51-5反转,六边形铝型
材1-2闭合,然后在手机端按下喷涂命令,使水泵3-4通电,将储料罐3-1的涂料送入到喷头1-1中,向树干喷涂,喷涂的过程中,控制直流电机,使直流电机驱动光杠1-6,从而带动六边形铝型材1-2上下移动,实现上下喷涂。
[0045]
以上实施例仅供说明本发明之用,而非对本发明的限制,有关技术领域的技术人员,在不脱离本发明的精神和范围的情况下,还可以作出各种变换或变化。本领域的普通技术人员,以本发明所明确公开的或根据文件的书面描述毫无异议的得到的,均应认为是本专利所要保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1