一种基于柔性铰链结构的XY全解耦微运动平台
一种基于柔性铰链结构的xy全解耦微运动平台
技术领域
1.本发明涉及微纳加工制造领域,特别涉及一种xy向微位移移动平台,具体涉及一种基于柔性铰链结构的xy全解耦微运动平台。
背景技术:
2.压电陶瓷驱动因其分辨率高、效应速度快等优势,被广泛应用于微纳驱动领域。基于压电陶瓷驱动柔性铰链机构以高精度、高频率而著称。从快刀伺服加工系统微纳制造领域的应用、到显微操作定位、精密对准、精密装配,柔性铰链机构已经成为了微纳操作中的重要元件,而优异的运行精度和高速的响应频率是衡量柔性铰链结构的重要指标。
3.近些年来,国内外学者已经在柔性铰链结构、控制算法等方面展开了大量研究。但总的来说主要解决装置输出精度、运行范围、响应频率、放大解耦性能等问题。对于两自由度的微运动平台,主要有串联式和并联式两种。其中,串联式机构具有控制简单,解耦性能强等优势,但其往往面临两个方向动态性能差异较大,误差累积难避免等问题。对于并联式结构,常用全对称结构,力学性能较好但往往存在xy两个方向运动耦合的问题,造成不必要的误差。本发明公开了一种通过高刚度杆件内应力来抵消装置耦合力的方法,设计了一种xy两向全解耦微运动平台。
4.此外,现有的柔性铰链结构输出平台常常被置于机构中心,以提供良好的力学性能。但较多场合需要微运动平台携带较大物体实施精密操作,例如显微观测中的对被测工件的操作,多镜片光学对准时,要求运动平台输出块预留有足够的安装尺寸。传统结构输出块往往较小,本发明公开的微运动装置柔性铰链结构被嵌入输出平台结构内部,使得扩大输出平台尺寸的同时保证结构紧凑。
5.综上所述,现有的两自由度xy运动机构输出块往往较小,携带较大物体实施精密操作,且往往面临两个方向动态性能差异较大,存在xy两个方向运动耦合的问题。
技术实现要素:
6.本发明的目的是为了解决现有的两自由度xy运动机构输出块往往较小,携带较大物体实施精密操作,且往往面临两个方向动态性能差异较大,存在xy两个方向运动耦合的问题,进而提供一种基于柔性铰链结构的xy全解耦微运动平台。
7.本发明的技术方案是:
8.一种基于柔性铰链结构的xy全解耦微运动平台,它包括压电陶瓷驱动器、电容传感器组、柔性铰链结构和输出平台300,柔性铰链结构包括机架202、x向柔性铰链组件、y向柔性铰链组件和四个输出角板块207,机架202上端面加工有容纳槽,x向柔性铰链组件包括x向移动块201、多个x向平行四边形铰链205和多个y向解耦结构209,x向移动块201沿x向置于容纳槽内,x向移动块201首端和末端的两侧通过x向平行四边形铰链205与机架202铰接,y向柔性铰链组件包括y向移动块a203、y向移动块b204、直板固定架400、y向平行四边形铰链206和多个x向解构结构208,y向移动块a203和y向移动块b204沿x向对称设置在x向移动
块201的两侧,y向移动块a203和y向移动块b204之间通过直板固定架400连接形成y向移动块本体,y向移动块本体首端和末端的两侧分别通过y向平行四边形铰链206与机架202铰接,压电陶瓷驱动器包括x向压电陶瓷100和y向压电陶瓷110,x向压电陶瓷100与x向移动块201同轴设置并安装在机架202上,y向压电陶瓷110与y向移动块本体同轴设置并安装在机架202上,电容传感器组包括x向电容传感器120和y向电容传感器130,x向电容传感器120位于x向移动块201远离x向压电陶瓷100一侧,x向电容传感器120与x向移动块201同轴设置并安装在机架202上,y向电容传感器130位于y向移动块本体远离y向压电陶瓷110一侧,x向移动块201与y向移动块本体垂直布设后形成四个直角区域,四个输出角板块207中心对称布置在所述四个直角区域内,每个输出角板块207靠近x向移动块201的一端均通过两个y向解耦结构209与x向移动块201连接,每个输出角板块207靠近y向移动块本体的一端均通过两个x向解构结构208与y向移动块本体连接,输出平台300分别与四个输出角板块207的上端面固接。
9.进一步地,机架202的上端面沿x向加工有与x向移动块201同轴设置的压电陶瓷装配槽a,所述压电陶瓷装配槽a位于x向移动块201的一侧,x向压电陶瓷100布置于压电陶瓷装配槽a中,x向压电陶瓷100输出端与x向移动块201连接。
10.进一步地,机架202的上端面沿y向加工有与y向移动块本体同轴设置的压电陶瓷装配槽b,所述压电陶瓷装配槽b位于y向移动块本体的一侧,y向压电陶瓷110布置于压电陶瓷装配槽b中,y向压电陶瓷110输出端与y向移动块a203连接。
11.进一步地,机架202的上端面沿x向加工有与x向移动块201同轴设置的传感器容纳通孔a,所述传感器容纳通孔a位于x向移动块201的另一侧,x向电容传感器120布置于传感器容纳通孔a内。
12.进一步地,机架202的上端面沿y向加工有与y向移动块本体同轴设置的传感器容纳通孔b,所述传感器容纳通孔b位于y向移动块本体的另一侧,y向电容传感器130布置于传感器容纳通孔b内。
13.进一步地,它还包括多个直板固定架连接螺栓240,x向移动块201中部加工有固定架通槽,直板固定架400沿y向水平置于固定架通槽内,直板固定架400的两端分别通过直板固定架连接螺栓240与y向移动块a203和y向移动块b204可拆卸连接。
14.进一步地,它还包括x向预紧螺栓101,x向压电陶瓷100通过x向预紧螺栓101与机架202连接。
15.进一步地,它还包括y向预紧螺栓111,y向压电陶瓷110通过y向预紧螺栓111与机架202连接。
16.进一步地,它还包括多个输出块连接螺栓230,输出平台300通过多个输出块连接螺栓230与四个输出角板块207连接。
17.进一步地,x向平行四边形铰链205和y向平行四边形铰链206结构相同,x向平行四边形铰链205包括四个直圆形双切口柔性铰链。
18.本发明与现有技术相比具有以下效果:
19.1、与传统两自由度xy运动机构相比,本发明基于柔性铰链结构的xy全解耦微运动平台中的柔性铰链结构嵌入到输出平台300内部,使得输出平台300尺寸较大,有利于对较大物体实施定位操作。柔性铰链结构一体制造,且结构完全对称,以便微运动平台具有良好
的力学性能;输出平台300所能达到尺寸范围由x向平行四边形铰链205或者y向平行四边形铰链206的尺寸决定。例如:当x向平行四边形铰链205间距为54mm时,输出平台300尺寸可以达到34mm。即输出平台300尺寸约为0.63倍的x向平行四边形铰链205尺寸。因此,本发明在保证输出平台300尺寸的情况下,缩小了整体机构的尺寸;
20.2、本发明所述基于柔性铰链结构的xy全解耦微运动平台能够实现高精度移动,为微纳加工、精密定位提供了实现基础。本发明通过在x向移动块201与四个输出角板块207之间设置八个y向解耦结构209,以及在y向移动块本体与四个输出角板块207之间设置x向解构结构208,实现运动结构完全解耦。本发明的四个输出角板块207的布置距离机构中心较远,与现有技术相比较,这样布置的优势在于当输出平台300受载荷不均匀时,此结构能更大程度的保持移动的稳定性。并且x向输出块201为厚板结构,薄板状的x向解耦机构208在工作过程中会将y向力转变为其内部应力,如图7所示,除平行四边形铰链机构以及解耦机构外其余部位几乎不会产生应变,因此,保证了机构工作的稳定性。
附图说明
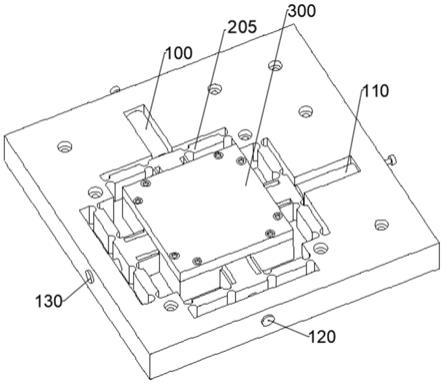
21.图1是本发明基于柔性铰链结构的xy全解耦微运动平台的轴测图;
22.图2是本发明基于柔性铰链结构的xy全解耦微运动平台的爆炸图;
23.图3是本发明柔性铰链结构去掉直板固定架400后的轴测图;
24.图4是本发明基于柔性铰链结构的xy全解耦微运动平台的俯视图;
25.图5是本发明直板固定架400的俯视图;
26.图6是本发明输出平台300的俯视图;
27.图7是本发明微动平台核心结构x向运动仿真示意图;
28.图8是本发明微动平台核心结构y向运动仿真示意图。
具体实施方式
29.具体实施方式一:结合图1至图6说明本实施方式,本实施方式的一种基于柔性铰链结构的xy全解耦微运动平台,它包括压电陶瓷驱动器、电容传感器组、柔性铰链结构和输出平台300,柔性铰链结构包括机架202、x向柔性铰链组件、y向柔性铰链组件和四个输出角板块207,机架202上端面加工有容纳槽,x向柔性铰链组件包括x向移动块201、多个x向平行四边形铰链205和多个y向解耦结构209,x向移动块201沿x向置于容纳槽内,x向移动块201首端和末端的两侧通过x向平行四边形铰链205与机架202铰接,y向柔性铰链组件包括y向移动块a203、y向移动块b204、直板固定架400、y向平行四边形铰链206和多个x向解构结构208,y向移动块a203和y向移动块b204沿x向对称设置在x向移动块201的两侧,y向移动块a203和y向移动块b204之间通过直板固定架400连接形成y向移动块本体,y向移动块本体首端和末端的两侧分别通过y向平行四边形铰链206与机架202铰接,压电陶瓷驱动器包括x向压电陶瓷100和y向压电陶瓷110,x向压电陶瓷100与x向移动块201同轴设置并安装在机架202上,y向压电陶瓷110与y向移动块本体同轴设置并安装在机架202上,电容传感器组包括x向电容传感器120和y向电容传感器130,x向电容传感器120位于x向移动块201远离x向压电陶瓷100一侧,x向电容传感器120与x向移动块201同轴设置并安装在机架202上,y向电容传感器130位于y向移动块本体远离y向压电陶瓷110一侧,x向移动块201与y向移动块本体
垂直布设后形成四个直角区域,四个输出角板块207中心对称布置在所述四个直角区域内,每个输出角板块207靠近x向移动块201的一端均通过两个y向解耦结构209与x向移动块201连接,每个输出角板块207靠近y向移动块本体的一端均通过两个x向解构结构208与y向移动块本体连接,输出平台300分别与四个输出角板块207的上端面固接。
30.本实施方式所述容纳槽的横截面为十字型或正方形,柔性铰链结构一体制造,且结构完全对称,以便微运动平台具有良好的力学性能。当容纳槽为十字形或正方形时,可以将平行四边形铰链结构等嵌入容纳槽中,充分利用容纳槽空间,从而限制了平台的整体尺寸,且十字形和正方形的容纳槽良好的对称性使得平台变形均匀,从而保证了优异的力学性能。
31.当微运动平台工况受限时,例如尺寸等方面的限制,可以根据实际工况调整容纳槽的形状,但是必须保证设计结构的对称性,以保证微运动平台的精度。
32.本实施方式的x向解构结构208和y向解耦结构209均为由铝材质制造而成的薄板状结构,具有一定的柔性。
33.具体实施方式二:结合图1至图4说明本实施方式,本实施方式的机架202的上端面沿x向加工有与x向移动块201同轴设置的压电陶瓷装配槽a,所述压电陶瓷装配槽a位于x向移动块201的一侧,x向压电陶瓷100布置于压电陶瓷装配槽a中,x向压电陶瓷100输出端与x向移动块201连接。如此设置,x向压电陶瓷100驱动移动块201沿x向移动,实现x向位移输入,进而实现微纳加工中的x向精确进给。其它组成和连接关系与具体实施方式一相同。
34.具体实施方式三:结合图1至图4说明本实施方式,本实施方式的机架202的上端面沿y向加工有与y向移动块本体同轴设置的压电陶瓷装配槽b,所述压电陶瓷装配槽b位于y向移动块本体的一侧,y向压电陶瓷110布置于压电陶瓷装配槽b中,y向压电陶瓷110输出端与y向移动块a203连接。如此设置,y向压电陶瓷110驱动移动块本体沿y向移动,实现y向位移输入,进而实现微纳加工中的y向精确进给。其它组成和连接关系与具体实施方式一或二相同。
35.具体实施方式四:结合图1至图4说明本实施方式,本实施方式的机架202的上端面沿x向加工有与x向移动块201同轴设置的传感器容纳通孔a,所述传感器容纳通孔a位于x向移动块201的另一侧,x向电容传感器120布置于传感器容纳通孔a内。如此设置,x向电容传感器120实现x向位移检测。其它组成和连接关系与具体实施方式一、二或三相同。
36.具体实施方式五:结合图1至图4说明本实施方式,本实施方式的机架202的上端面沿y向加工有与y向移动块本体同轴设置的传感器容纳通孔b,所述传感器容纳通孔b位于y向移动块本体的另一侧,y向电容传感器130布置于传感器容纳通孔b内。如此设置,y向电容传感器130实现y向位移检测。其它组成和连接关系与具体实施方式一、二、三或四相同。
37.具体实施方式六:结合图2至图5说明本实施方式,本实施方式还包括多个直板固定架连接螺栓240,x向移动块201中部加工有固定架通槽,直板固定架400沿y向水平置于固定架通槽内,直板固定架400的两端分别通过直板固定架连接螺栓240与y向移动块a203和y向移动块b204可拆卸连接。如此设置,用于将直板固定架400与y向移动块a203和y向移动块b204连接,实现y向移动块a203和y向移动块b204的固定,形成刚性连接。其它组成和连接关系与具体实施方式一、二、三、四或五相同。
38.本实施方式的x向移动块201上的固定架通槽的槽宽大于直板固定架400的宽度,
保证直板固定架400的外侧壁与固定架通槽的内侧壁之间存在一定的间隙,使得x向移动块201在x向压电陶瓷100的驱动下沿x向移动时,不会与直板固定架400发生干涉。
39.具体实施方式七:结合图1至图4说明本实施方式,本实施方式还包括x向预紧螺栓101,x向压电陶瓷100通过x向预紧螺栓101与机架202连接。如此设置,用于将x向压电陶瓷100固定在机架202上,采用螺栓连接的方式在保证连接强度的同时,还方便实现零部件之间的拆装。其它组成和连接关系与具体实施方式一、二、三、四、五或六相同。
40.具体实施方式八:结合图1说明本实施方式,本实施方式还包括y向预紧螺栓111,y向压电陶瓷110通过y向预紧螺栓111与机架202连接。如此设置,用于将y向压电陶瓷110固定在机架202上,采用螺栓连接的方式在保证连接强度的同时,还方便实现零部件之间的拆装。其它组成和连接关系与具体实施方式一、二、三、四、五、六或七相同。
41.具体实施方式九:结合图1至图4和图6说明本实施方式,本实施方式还包括多个输出块连接螺栓230,输出平台300通过多个输出块连接螺栓230与四个输出角板块207连接。如此设置,用于将输出平台300固定在四个输出角板块207上,进而将四个输出角板块207的位移传递给输出平台300。其它组成和连接关系与具体实施方式一、二、三、四、五、六、七或八相同。
42.具体实施方式十:结合图1至图4说明本实施方式,本实施方式的x向平行四边形铰链205和y向平行四边形铰链206结构相同,x向平行四边形铰链205包括四个直圆形双切口柔性铰链。其它组成和连接关系与具体实施方式的一、二、三、四、五、六、七、八或九相同。
43.本实施方式的x向移动块201靠近x向压电陶瓷100的一端左右外侧壁分别通过两个直圆形双切口柔性铰链与机架202的容纳槽内侧壁相铰接;x向移动块201靠近x向电容传感器120的一端左右外侧壁分别通过两个直圆形双切口柔性铰链与机架202的容纳槽内侧壁相铰接;y向移动块a203靠近y向压电陶瓷110的一端左右外侧壁分别通过两个直圆形双切口柔性铰链与机架202的容纳槽内侧壁相铰接;y向移动块b204靠近y向电容传感器130的一端左右外侧壁分别通过两个直圆形双切口柔性铰链与机架202的容纳槽内侧壁相铰接;
44.工作原理
45.结合图1至图7说明本发明所述基于柔性铰链结构的xy全解耦微运动平台的工作原理:
46.一、x向运动原理过程如下:
47.x向位移输入由x向压电陶瓷100提供,x向压电陶瓷100在电压作用下伸缩,推动x向移动块201沿x向发生位移,x向移动块201通过四个平行的直圆形双切口柔性铰链与机架202相铰接,x向平行四边形铰链205具有输出位移导向功能,使得x向移动块201稳定的平行于机架202运动,x向移动块201严格平行于机架202发生x向位移。x向移动块201通过八个y向解耦结构209分别与四个输出角板块207相连。
48.y向解耦结构209的功能有两方面:其中,一方面实现x向移动块201与四个输出角板块207之间的力传递功能,使得x向输出块201沿x向运动时,输出角板块207也沿x向运动。另一方面当四个输出角板块207发生y向位移时,八个y向解耦结构209将力全部传导至x向移动块201上,然而x向移动块201为厚板结构,具有较强的刚度,所以可以将y向力转变为内应力,从而实现xy向位移解耦,实现运动结构完全解耦。
49.此外,四个输出角板块207通过多个输出块连接螺栓230与输出平台300固接,当四
个输出角板块207在x向移动块201的作用下向x向移动时,输出平台300也随x向移动块201发生相应位移。
50.二、y向运动原理与x向运动原理一致。y向运动原理过程如下:y向位移输入由y向压电陶瓷110提供,y向压电陶瓷110在电压作用下伸缩,推动y向移动块本体沿y向发生位移,y向移动块本体通过四个平行的直圆形双切口柔性铰链与机架202相铰接,y向平行四边形铰链206具有输出位移导向功能,使得y向移动块本体稳定的平行于机架202运动,y向移动块本体严格平行于机架202发生y向位移。y向移动块本体通过八个x向解构结构208分别与四个输出角板块207相连。
51.x向解构结构208的功能有两方面:其中,一方面实现y向移动块本体与四个输出角板块207之间的力传递功能,使得y向移动块本体沿y向运动时,输出角板块207也沿y向运动。另一方面当四个输出角板块207发生x向位移时,八个x向解构结构208将力全部传导至y向移动块本体上,然而y向移动块本体为厚板结构,具有较强的刚度,所以可以将x向力转变为内应力,从而实现xy向位移解耦,实现运动结构完全解耦。
52.此外,四个输出角板块207通过多个输出块连接螺栓230与输出平台300固接,当四个输出角板块207在y向移动块本体的作用下向y向移动时,输出平台300也随y向移动块本体发生相应位移。
53.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1