一种应用于制药机械上的运瓶机构的制作方法
[0001]
本实用新型制药机械技术领域,特别涉及一种应用于制药机械上的运瓶机构。
背景技术:
[0002]
目前各种制药设备、饮料灌装设备中经常需要使用到送瓶机构或者运瓶机构,将瓶子由上一个工位送到下一个工位。送瓶或者运瓶过程中需要进行直线运动或/和升降运动,甚至为了检查,还需要进行旋转或者翻转运动。因此目前各种制药设备、饮料灌装设备中经常需要使用到送瓶机构或者运瓶机构结构比较复杂,造成运行不稳定,维修困难,成本高。
技术实现要素:
[0003]
本实用新型所要解决的技术问题在于针对上述各种制药设备、饮料灌装设备中经常需要使用到送瓶机构或者运瓶机构结构比较复杂,造成运行不稳定,维修困难,成本高等问题而提供一种结构简单、运行稳定、成本低的应用于制药机械上的运瓶机构。
[0004]
本实用新型所要解决的技术问题可以通过以下技术方案来实现:
[0005]
一种应用于制药机械上的运瓶机构,包括两个驱动源和一四连杆机构,其中:两个驱动源的回转中心同心;四连杆机构中的第一连杆一端与第一驱动源的输出轴固定连接,第二连杆的一端与第二驱动源的输出轴固定连接,第一连杆的另一端与所述第四连杆的一端铰接,第二连杆的另一端与所述第三连杆的一端铰接,所述第三连杆的另一端与所述第四连杆的中间适当位置铰接,在所述第四连杆的另一端设置有抓瓶机构。
[0006]
在本实用新型的一个优选实施例中,所述第一驱动源和第二驱动源均为伺服电机。
[0007]
本实用新型的工作原理如下:第一驱动源驱动第一连杆回转摆动时,其可以带动第四连杆另一端上的抓瓶机构上下运动,第二驱动源驱动第二连杆回转摆动时,其可以通过第三连杆带动第四连杆左右摆动,因此,可以设定第一驱动源和第二驱动源的工作程序,来满足抓瓶机构的运动轨迹要求。
[0008]
由于采用了如上的技术方案,本实用新型在送瓶或者运瓶过程中,依靠两个驱动源、四连杆机构实现瓶体的往复直线运动和升降运动,具有结构简单、运动稳定、成本低的优点。
附图说明
[0009]
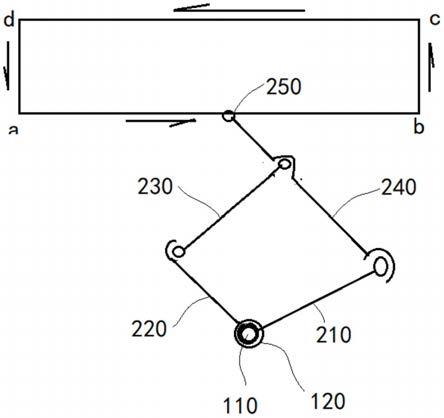
图1为本实用新型应用于制药机械上的运瓶机构的结构示意图。
[0010]
图2为本实用新型的运动轨迹示意图。
具体实施方式
[0011]
以下结合附图和具体实施方式来进一步描述本实用新型。
[0012]
参见图1,图中所示的一种应用于制药机械上的运瓶机构,包括两个驱动源和一四连杆机构,其中:两个驱动源110、120的回转中心同心;两个驱动源110、120均为伺服电机。
[0013]
四连杆机构中的第一连杆210一端与第一驱动源110的输出轴固定连接,第二连杆220的一端与第二驱动源120的输出轴固定连接,第一连杆210的另一端与第四连杆220的一端铰接,第二连杆的另一端与第三连杆230的一端铰接,第三连杆230的另一端与第四连杆240的中间适当位置铰接,在第四连杆240的另一端设置有抓瓶机构250。
[0014]
第一驱动源110驱动第一连杆210回转摆动时,其可以带动第四连杆240另一端上的抓瓶机构250上下运动,第二驱动源120驱动第二连杆220回转摆动时,其可以通过第三连杆230带动第四连杆240左右摆动,因此,可以设定第一驱动源110和第二驱动源120的工作程序,来满足抓瓶机构250的运动轨迹要求。
[0015]
本实用新型的工作过程如下:
[0016]
参见图2,送瓶时,第一驱动110和第二驱动源120分别按照要求驱动第一连杆210和第二连杆220匀速回转,匀速回转的第一连杆210和第二连杆220通过第三连杆230驱动第四连杆240上的抓瓶机构250由取瓶位置c点匀速运动到放瓶位置的d点。
[0017]
送瓶结束后,第一驱动110和第二驱动源120分别按照要求驱动第一连杆210和第二连杆220加速回转,加速回转的第一连杆210和第二连杆220通过第三连杆230驱动第四连杆240上的抓瓶机构250由放瓶位置d点快速下降至d点,快速脱离放瓶位置。
[0018]
回程时,第一驱动110和第二驱动源120分别按照要求驱动第一连杆210和第二连杆220加速回转,加速回转的第一连杆210和第二连杆220通过第三连杆230驱动第四连杆240上的抓瓶机构250由d点快速运动到b点。
[0019]
取瓶时,第一驱动110和第二驱动源120分别按照要求驱动第一连杆210和第二连杆220匀速回转,匀速回转的第一连杆210和第二连杆220通过第三连杆230驱动第四连杆240上的抓瓶机构250由b点匀速运动到取瓶位置的c点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1