汽车内油盖开盖装置和自动加油机器人的制作方法
1.本发明涉及自动加油机器人技术领域,尤其涉及一种汽车内油盖开盖装置和自动加油机器人。
背景技术:
2.随着经济水平的提高,越来越多人购买汽车作为代步工具。目前市场上大部分汽车都是燃油车辆,在燃尽油料之后需要到加油站加油才能继续上路。目前多数加油站都是人工进行加油操作,人力成本较高。多数加油站为了节约人力成本,聘请的工人数量少于加油机的数量。若待加油的汽车数量过多,则会出现人手不足的情况,用户需要等待较长时间。
3.为节约人力成本,业内有技术人员研发出一些自动加油机器人,实现机械自动化,无需人工操作。但是由于不同汽车的内油盖形状各异,目前的自动加油机器人需要通过摄像头识别内油盖形状及其抓取部所在位置,据以控制加油机器人的夹指旋转至能够夹住内油盖抓取部的角度,然后伸入并夹住内油盖抓取部,进而旋转拧开内油盖。这种开盖方式操作麻烦。
技术实现要素:
4.本发明所要解决的技术问题是提供一种汽车内油盖开盖装置以及包括该开盖装置的自动加油机器人,该开盖装置无需利用摄像头识别内油盖形状及其抓取部所在位置就能够推动内油盖抓取部旋转拧开内油盖。
5.为了接近上述技术问题,本发明的一种汽车内油盖开盖装置,包括抓取机构以及驱动抓取机构旋转打开内油盖的旋转机构,抓取机构朝前伸出有并列的多个可伸缩顶针,当抓取机构伸向汽车内油盖时,至少有部分可伸缩顶针受挤压回缩,对准内油盖抓取部的顶针回缩量大于其旁侧的顶针,如此则使其旁侧的顶针与内油盖抓取部并置,旋转机构驱动抓取机构旋转,使得与内油盖抓取部并置的顶针推动内油盖抓取部旋转从而拧开内油盖。
6.可选的,抓取机构朝前伸出有可伸缩气管,可伸缩气管前端接有用于吸住内油盖的吸盘。
7.可选的,抓取机构包括用于锁定可伸缩顶针的锁止件,锁止件锁定顶针以防止顶针在旋转拧开内油盖的过程中复位前伸。
8.可选的,抓取机构包括用于驱动锁止件锁定顶针的锁止驱动装置。
9.可选的,所述锁止件是卡板,卡板上开有供多个顶针分别穿出的多个卡孔,每个顶针后部沿针轴排列有多个卡凸部,卡板沿径向移动则卡板上的各个卡孔侧壁分别卡在对应的顶针上的某个卡凸部上,从而锁定全部顶针。
10.可选的,锁止驱动装置具有推杆,通过杠杆结构驱动上述卡板,具体地:锁止驱动装置装在卡板后方,位于抓取机构的主轴线上;杠杆位于所述主轴线旁侧,其前端连接卡板
而后端位于锁止驱动装置旁侧;锁止驱动装置往该旁侧径向伸出推杆推动杠杆的后端则杠杆的前端带动卡板反向移动卡住顶针上的卡凸部。
11.可选的,抓取机构在杠杆后端设有导引杠杆后端径向移动的径向导向杆,径向导向杆上套有为杠杆提供复位力的复位弹簧。
12.可选的,抓取机构朝前伸出有可伸缩气管,可伸缩气管前端接有用于吸住内油盖的吸盘,所述锁止件一同锁定顶针和气管。
13.可选的,可伸缩气管和顶针上分别套有为其提供复位力的复位弹簧。
14.一种自动加油机器人,包括控制器、电连接控制器的机械臂以及设在机械臂末端的汽车内油盖开盖装置,控制器控制机械臂带动开盖装置移动至汽车内油盖处旋转拧开内油盖,所述开盖装置是如上所述的汽车内油盖开盖装置。
15.上述开盖装置的抓取机构设有可伸缩顶针,由于内油盖抓取部通常凸出于内油盖表面,当抓取机构伸向内油盖时,可伸缩顶针受挤压回缩,对准内油盖抓取部的顶针回缩量大于其旁侧的顶针,故其旁侧的顶针与内油盖抓取部并置,在此状态下,旋转机构驱动抓取机构旋转,位于内油盖抓取部两侧的可伸缩顶针跟着旋转从而推动内油盖抓取部旋转拧开内油盖。如此一来,上述开盖装置无需利用摄像头识别内油盖形状及其抓取部所在位置也能够推动内油盖抓取部旋转拧开内油盖。
附图说明
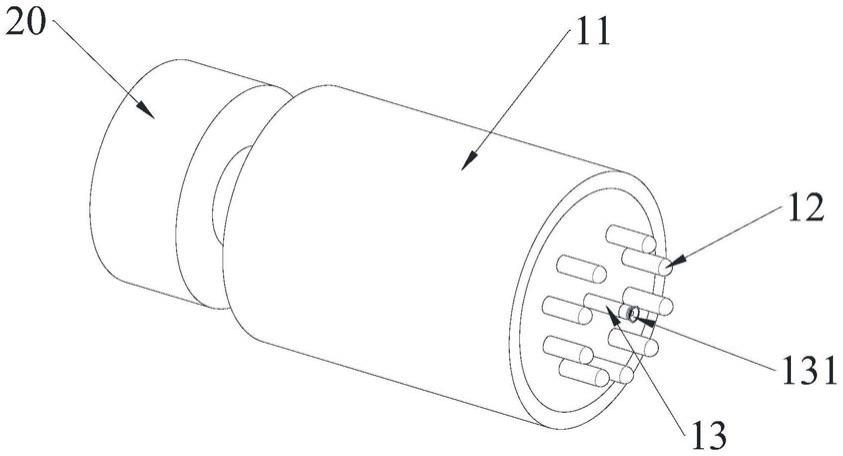
16.图1是汽车内油盖开盖装置的立体图;
17.图2是汽车内油盖开盖装置的侧视图,图中虚线为抓取机构的主轴线;
18.图3是沿图2中a-a剖线的剖视图;
19.图4是汽车内油盖开盖装置隐去抓取机构的外壳后的结构图;
20.图5是汽车内油盖开盖装置的顶针的结构图;
21.图6是汽车内油盖开盖装置伸向内油盖时的状态图;
22.图7是图6中b处的放大示意图。
23.附图说明:11、抓取机构;12、顶针;121、卡凸部;122、卡块;13、气管;131、吸盘;14、复位弹簧;15、限位板;20、气动马达;31、气缸;32、径向导向杆;33、复位弹簧;34、杠杆;35、卡板;36、支点;37、限位钉;40、内油盖;41、内油盖抓取部。
具体实施方式
24.以下结合具体实施方式对本发明创造作进一步详细说明。
25.自动加油机器人系统包括加油机和自动加油机器人。自动加油机器人包括蛇形机械臂、摄像装置以及电连接蛇形机械臂和摄像装置的控制器。加油机通信连接自动加油机器人的控制器。加油机的加油枪固定在蛇形机械臂末端的非主轴线的位置处。蛇形机械臂末端主轴线处设有内油盖开盖装置,该内油盖开盖装置电连接控制器。蛇形机械臂末端在内油盖开盖装置旁设有外油盖吸盘。
26.当需要为用户汽车加油时,自动加油机器人通过摄像装置识别出汽车油箱外盖口所在位置,然后控制蛇形机械臂移动至油箱外盖口所在位置并使外油盖吸盘对准油箱外盖口按压吸住外油盖,然后控制蛇形机械臂带动外油盖吸盘拉开外油盖。在拉开外油盖之后,
自动加油机器人再控制蛇形机械臂带动内油盖开盖装置移动对准油箱口以拧开内油盖。如图1或2所示,该内油盖开盖装置包括抓取机构11,抓取机构11朝前伸出有并列的多个可伸缩顶针12,并沿主轴线伸出有可伸缩气管13,可伸缩气管13前端接有吸盘131。可伸缩气管13后端通过外接气管连通外置的空气压缩机(未图示),该空气压缩机电连接控制器。蛇形机械臂带动内油盖开盖装置移动对准油箱口之后,使开盖装置伸入油箱口朝内油盖40挤压。如图5所示,顶针12中部套有复位弹簧14,气管13亦是如此,顶针12或气管13上靠近前端的位置处径向凸出有卡块122,复位弹簧14前端抵在卡块122上而另一端抵在抓取机构11的限位板15(见图3或4)上,在开盖装置朝内油盖40挤压的过程中,顶针12和气管13受内油盖40挤压克服复位弹簧14的复位力而回缩,如图6或7所示,由于内油盖抓取部41凸出于内油盖40表面,对准内油盖抓取部41的顶针12和气管13的回缩量大于其两旁侧的顶针12,如此则使得其两旁侧的顶针12与内油盖抓取部41并置。在此状态下,空气压缩机启动使吸盘131吸住内油盖40。如图4所示,抓取机构11包括用于锁定顶针12和气管13的卡板35(即锁止件),卡板35上开有供多个顶针12和气管13分别穿出的多个卡孔。如图5所示,顶针12后部沿针轴排列有多个卡凸部121,气管13后部亦是如此。如图4所示,抓取机构11包括气缸31,其作为锁止驱动装置驱动卡板35锁定顶针12和气管13。气缸31具有推杆,通过杠杆结构驱动上述卡板35,具体地:气缸31装在卡板35后方,位于抓取机构11的主轴线上;杠杆34位于所述主轴线旁侧,其前端连接卡板35而后端位于气缸31旁侧;抓取机构11在杠杆34后端设有导引杠杆34后端径向移动的径向导向杆32,径向导向杆32上套有为杠杆34提供复位力的复位弹簧33。气缸31往该旁侧径向伸出推杆推动杠杆34的后端克服复位弹簧33的复位力绕着支点36(见图3)转动,从而沿径向导向杆32径向往上移动,则杠杆34的前端带动卡板35反向往下移动卡住顶针12上的以及气管13上的某个卡凸部121,从而锁定顶针12和气管13,防止顶针12和气管13在旋转拧开内油盖40的过程中复位前伸。如图3所示,抓取机构11内侧壁上为卡板35设有限位钉37,其能使卡板35在移动过程中保持径向移动而不会产生轴向移动。
27.如图1所示,开盖装置包括气动马达20。在锁定顶针12和气管13之后,气动马达20作为旋转机构,驱动抓取机构11旋转,使得与内油盖抓取部41并置的顶针12推动内油盖抓取部41旋转从而拧开内油盖40。内油盖40已被吸盘131吸住,拧开之后不会从开盖装置上掉落。
28.在拧开内油盖40之后,自动加油机器人控制蛇形机械臂带动加油枪移动对准汽车油箱口并插入到油箱中,然后发送信号给加油机,使其开启加油枪为汽车进行加油。加好油之后,加油机自动关闭加油枪。自动加油机器人控制蛇形机械臂带动加油枪脱离汽车油箱,然后控制蛇形机械臂带动内油盖开盖装置把内油盖40装回油箱口上,然后自动加油机器人就关闭空气压缩机使吸盘131松开内油盖40,并使气缸31缩回推杆,杠杆34后端在复位弹簧33的复位力作用下绕着支点36反向向下转动复位,则杠杆34前端拉动卡板35向上复位不再卡住顶针12和气管13上的卡凸部121,然后控制蛇形机械臂带动内油盖开盖装置从油箱口处退出来,在此过程中,开盖装置的顶针12和气管13会在复位弹簧14的作用下自动复位至如图1所示。然后自动加油机器人再控制蛇形机械臂带动外油盖吸盘把外油盖盖回外盖口上。至此,完成了加油,用户就可以重新开车上路了。
29.如上所述仅为本发明创造的实施方式,不以此限定专利保护范围。本领域技术人员在本发明创造的基础上作出非实质性的变化或替换,仍落入专利保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1