基于数据融合的超声波流量计流量测量方法与流程
[0001]
本发明属于超声波流量计技术领域,涉及一种基于数据融合的超声波流量计流量测量方法。
背景技术:
[0002]
超声波流量计以其非接触、压损小、量程宽等优点,在流量计量领域得到了大量应用。超声波流量计根据其原理,可分为传播时间差法、多普勒法、波束偏移法等类型,其中传播时间差法由于其实现简单,可应用于超纯液体等特点,应用最为广泛。采用传播时间差法的超声波流量计也称为时差式超声波流量计,基本的时差式超声波流量计实施方式如附图1和图2所示,在测量管1的对侧设置第一超声换能器2和第二超声换能器3,第一超声换能器2和第二超声换能器3对侧同心设置,超声换能器的轴线与测量管1的轴线成一锐角夹角;位于流体流动上游的第一超声换能器2发射超声波,穿过测量管1内的流体介质后被第二超声换能器3接收,此为超声波的顺流传播过程;位于流体流动下游的第二超声换能器3发射超声波,穿过测量管1内的流体介质后被第一超声换能器2接收,此为超声波的逆流传播过程;超声换能器接收到的超声信号,经过信号采集模块处理后送入数字信号处理模块进行流量计算;超声波的传播在顺流传播过程中被加速而在逆流过程中被减速,超声波传播速度被加速和减速的程度与流体的流速有关,通过测量超声波顺流和逆流的传播时间,可以计算出流体的流速,进而测量出流体的流量。
[0003]
超声波信号传播时间的准确检测是保证时差式超声波流量计测量精度的关键,常用检测方法有阈值法、相关法、拟合法等。其中应用最广泛的是阈值法(例如发明专利:傅新,方泽华,毛凯,陈文昱,肖继伟,一种提高时差式超声波流量计抗干扰能力的时间检测方法,中国发明专利,公开号cn 106932038 a,申请日2019.12.30),其基本原理是将超声波信号与一个预设的阈值进行比较,当信号某个周期的幅值首次大于阈值后(将该周期称为触发周期),开始检测超声波信号的过零点,根据过零点的位置确定该信号的传播时间。该方法一大优点是检测精度不受超声波形状变化的影响。该方法有两个缺点:一是检测到的时间精度仅取决于所用过零点的特性,精度易受噪声影响;二是检测到的时间与实际传播时间之间存在偏置,会影响测量性能(例如温度漂移)。另一个应用广泛的检测方法是相关法,其基本原理是将超声波信号与参考信号进行相关运算,计算互相关函数,根据函数值的峰值位置确定传播时间。该方法的特点是使用了超声波信号的全部信息,检测到的传播时间与信号实际传播时间之间无偏差,精度和稳定性较高,不受超声波信号幅值变化的影响。该方法的缺点是检测时间的精度受采样率和超声波信号形状变化的影响大。
[0004]
现有的超声波流量计往往都单独选用某一种传播时间检测方式,对同一声道在短时间内进行多次顺流传播时间和逆流传播时间的检测,再进一步计算出流量数据。这样的方法虽然可以有效避免粗大误差,但仍然会保留所选传播时间检测方法的固有缺陷。
技术实现要素:
[0005]
发明的目的在于提供基于数据融合算法的超声波流量计流量测量方法,可以解决现有超声波流量计传播时间检测方法存在的抗干扰性能差的问题,从而提高流量检测的可靠性和检测结果的精度。本发明包括以下步骤:
[0006]
s1:初始化系统,默认设置初始流量q=0;
[0007]
s2:导入信号采集系统收到的超声波信号,对信号进行滤波、去偏置等预处理,记处理好的顺流超声波信号序列为x
d
(n),逆流超声波信号序列为x
u
(n),信号采样频率均为f
s
;
[0008]
s3:使用相关法,计算出信号x
d
和x
u
对应的传播时间t
d1
和t
u1
,进一步计算出流量q1;
[0009]
s4:使用阈值法,计算出信号x
d
和x
u
对应的传播时间t
d2
和t
u2
,进一步可以计算出流量q2;
[0010]
s5:取出上次流量计算过程输出的流量值q0,如果是第一次计算流量,则q0取初始流量值;计算3个差值,依据判定条件,进行工况判定;
[0011]
所述3个差值分别为δ1=|q
1-q0|,δ2=|q
2-q0|,δ3=|q
1-q2|;
[0012]
假设流量计最大测量值为q
max
,所述工况与对应的判定条件为:
[0013]
工况一:δ1≤0.1
·
q
max
,且δ2≤0.1
·
q
max
;
[0014]
工况二:δ1≤0.1
·
q
max
,且δ2>0.1
·
q
max
;
[0015]
工况三:δ1>0.1
·
q
max
,且δ2≤0.1
·
q
max
;
[0016]
工况四:δ1>0.1
·
q
max
,且δ2>0.1
·
q
max
,且δ3≤0.1
·
q
max
;
[0017]
工况五:δ1>0.1
·
q
max
,且δ2>0.1
·
q
max
,且δ3>0.1
·
q
max
;
[0018]
s6:根据判定结果,应用对应方法,计算本次检测结果流量q;
[0019]
具体为:
[0020]
工况一:q=f1(q0,q1,q2),f1表示卡尔曼滤波器实现的数据融合算法,该算法以q0作为状态变量,q1,q2均作为观测值;
[0021]
工况二:q=f2(q0,q1),f2表示卡尔曼滤波算法,该算法以q0作为状态变量,q1作为观测值;
[0022]
工况三:q=f3(q0,q2),f3表示卡尔曼滤波算法,该算法以q0作为状态变量,q2作为观测值;
[0023]
工况四:q=f4(q1,q2),f4表示卡尔曼滤波器实现的数据融合算法,该算法以q1作为状态变量,q2作为观测值;
[0024]
工况五:q=q0;
[0025]
s7:等待下一组信号接收完成后按s1至s6步骤继续执行流量测量过程。
[0026]
在步骤s3中,采集10对超声波顺逆流传播信号,使用相关法分别计算出10组超声波顺逆流传播时间,再分别取平均值后作为传播时间t
d1
和t
u1
。
[0027]
在步骤s4中,采集10对超声波顺逆流传播信号,使用阈值法分别计算出10组超声波顺逆流传播时间,再分别取平均值后作为传播时间t
d2
和t
u2
。本发明兼具相关法和阈值法两种超声波传播时间检测方法所具有的优点,可以有效抵抗温度变化、老化等因素导致的信号幅值衰减和畸变问题,提高流量计的抗干扰能力,增强流量测量结果的可靠性,提高测
量准确度。
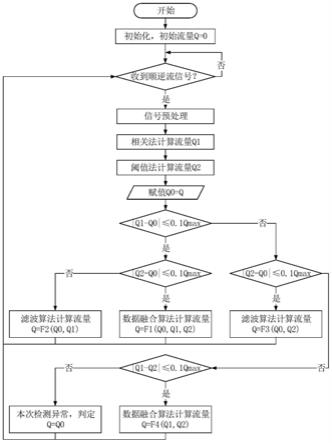
附图说明
[0028]
图1为现有的超声波流量计结构示意图;
[0029]
图2为现有超声波流量计的电路模块示意图;
[0030]
图3为本发明流程图;
[0031]
图4为应用本发明所述方法与传统方法的测量结果对比图。
具体实施方式
[0032]
如图3所示,基于数据融合的超声波流量计流量测量方法,包括如下步骤:
[0033]
s1:初始化系统,默认设置初始流量q=0;
[0034]
s2:导入信号采集系统收到的超声波信号,可选地,对信号进行滤波、去偏置等预处理,记处理好的顺流超声波信号序列为x
d
(n),逆流超声波信号序列为x
u
(n),信号采样频率均为f
s
;
[0035]
s3:使用相关法,计算出顺流超声波信号x
d
和逆流超声波信号x
u
对应的传播时间t
d1
和t
u1
,进一步可以计算出流量其中k1是相关法下的流量系数,与流量计一次仪表(包括测量管和超声换能器)参数、相关法算法参数有关,可以通过理论计算或实验拟合等方法确定;也采集10对超声波顺逆流传播信号,使用相关法分别计算出10组超声波顺逆流传播时间,再分别取平均值后作为传播时间t
d1
和t
u1
,以增强算法的抗干扰性;
[0036]
s4:使用阈值法,计算出信号x
d
和x
u
对应的传播时间t
d2
和t
u2
,进一步可以计算出流量其中k2是阈值法下的流量系数,与流量计一次仪表(包括测量管和超声换能器)参数、阈值法算法参数有关,可以通过理论计算或实验拟合等方法确定;也可以采集10对超声波顺逆流传播信号,使用阈值法分别计算出10组超声波顺逆流传播时间,再分别取平均值后作为传播时间t
d2
和t
u2
,以增强算法的抗干扰性;
[0037]
s5:取出上次流量计算过程输出的流量值q0,如果是第一次计算流量,则q0取初始流量值;计算3个差值,依据判定条件,进行工况判定;
[0038]
所述3个差值分别为δ1=|q
1-q0|,δ2=|q
2-q0|,δ3=|q
1-q2|;
[0039]
假设流量计最大测量值为q
max
,所述工况与对应的判定条件为:
[0040]
工况一:δ1≤0.1
·
q
max
,且δ2≤0.1
·
q
max
,则认为两种方法计算出的流量均为合理值,且流量无突变;
[0041]
工况二:δ1≤0.1
·
q
max
,且δ2>0.1
·
q
max
,则认为相关法计算出的流量q1为合理值,阈值法计算出的流量q2异常;
[0042]
工况三:δ1>0.1
·
q
max
,且δ2≤0.1
·
q
max
,则认为相关法计算出的流量q1异常,阈值法计算出的流量q2为合理值;
[0043]
工况四:δ1>0.1
·
q
max
,且δ2>0.1
·
q
max
,且δ3≤0.1
·
q
max
,则认为两种方法计算出的流量均为合理值,且流量发生了突变;
[0044]
工况五:δ1>0.1
·
q
max
,且δ2>0.1
·
q
max
,且δ3>0.1
·
q
max
,则认为两种方法计算出的流量均异常,本次检测无效;
[0045]
s6:根据判定结果,应用对应方法,计算本次检测结果流量q;
[0046]
所述对应方法为:
[0047]
工况一:q=f1(q0,q1,q2),f1表示卡尔曼滤波器实现的数据融合,以q0作为状态变量,q1,q2均作为观测值;
[0048]
工况二:q=f2(q0,q1),f2表示卡尔曼滤波算法,该算法以q0作为状态变量,q1作为观测值;
[0049]
工况三:q=f3(q0,q2),f3表示卡尔曼滤波算法,该算法以q0作为状态变量,q2作为观测值;
[0050]
工况四:q=f4(q1,q2),f4表示卡尔曼滤波器实现的数据融合,以q1作为状态变量,q2作为观测值;
[0051]
工况五:q=q0;
[0052]
s7:等待下一组信号接收完成后按s1至s6步骤继续执行流量计算过程。
[0053]
在上述步骤s6中涉及的被卡尔曼滤波算法处理的系统模型由状态方程和观测方程组成,其中状态方程为:x(k)=a(k)x(k-1)+b(k)u(k);观测方程为:u(k)=h(k)x(k)+w(k);经卡尔曼滤波处理后状态更新方程为:(k);经卡尔曼滤波处理后状态更新方程为:
[0054]
式中,x(k)是k时刻(也即当前时刻)的状态变量;x(k-1)是(k-1)时刻(前一时刻)的状态变量,也是步骤s6中工况二或工况三对应的状态变量q0,或工况四对应的状态变量q1;u(k)是k时刻(也即当前时刻)的观测值,也是步骤s6中工况二中的q1,或工况三中的q2,或工况四中的q2;是k时刻的后验状态估计值,也是卡尔曼滤波处理的结果之一,也是步骤s6中得到的结果流量q;是k时刻的先验状态估计值,是根据公知的卡尔曼滤波算法获得的中间结果;w(k)是预测过程的噪声,w(k)符合高斯噪声分布规律;a(k)和b(k)是由系统确定的状态转移矩阵且满足a(k)+b(k)=1;h(k)是观测矩阵;k(k)是卡尔曼增益矩阵,根据公知的卡尔曼滤波算法获得。
[0055]
如果将上述卡尔曼滤波处理的系统状态方程修改为:
[0056]
x(k)=a(k)x(k-1)+b(k)u(k);
[0057]
u(k)=h(k)x(k)+w(k);
[0058]
观测方程修改为:
[0059]
z(k)=g(k)x(k)+v(k);
[0060]
经卡尔曼滤波处理后状态更新方程修改为:
[0061][0062]
则获得步骤s6中工况一所述的卡尔曼滤波器实现的数据融合算法f1。其中,x(k-1)仍然是(k-1)时刻(前一时刻)的状态变量,也是步骤s6中工况一对应的状态变量q0;u(k)、z(k)分别是k时刻的两个观测值,也即分别对应步骤s6中工况一的观测值q1或q2;v(k)是预测过程的噪声,v(k)符合高斯噪声分布规律;g(k)是观测矩阵。
[0063]
对本发明的一种实施例进行了流量标定实验,在一套流量标定系统中安装超声波
流量计,分别使用相关法、阈值法以及本发明所述的流量计算方法对超声波流量计获得的信号进行处理和计算流量。实验结果参考图4,在前100组数据中,流量标定系统中通过超声波流量计的流量设定为6l/min,后100组数据中,流量标定系统中通过超声波流量计的流量设定为7l/min;从图中可以看到,相比相关法和阈值法,使用本发明后,计算得到的流量数据的跳动量明显减小,更加符合流量设定值;还有效避免传统流量计算方法造成的异常结果,例如第20组附近数据反映出的阈值法异常结果;因此提高了流量检测的准确度和可靠性;而且,从第100组位置处可以看到,本发明所述流量计算方法处理速度快,不会带来额外延迟,可以保证超声波流量计的响应性能。
[0064]
以上内容和结构描述了本发明产品的基本原理、主要特征和本发明的优点,本行业的技术人员应该了解。上述实例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都属于要求保护的本发明范围之内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1