一种人工智能导航仪的制作方法
[0001]
本实用新型涉及车载导航仪技术领域,具体为一种人工智能导航仪。
背景技术:
[0002]
导航仪是汽车上必不可少的设备,主要起到为人们导航至指定位置的作用,随着科技的发展导航仪也由最初的手动操作变为可通过语音下达指令的人工智能导航仪,从而解放驾驶者的手部操作,将注意力集中在道路上。
[0003]
现有的导航仪若不定期进行擦拭其表面往往会粘附有灰尘颗粒,影响导航仪的清晰度,尤其是对敞篷汽车来说,导航仪表面更加易粘附灰尘,而且导航仪无法调整角度,针对上述情况,我们推出了一种人工智能导航仪。
技术实现要素:
[0004]
本实用新型的目的在于提供一种人工智能导航仪,以解决上述背景技术中提出一般的导航仪若不定期进行擦拭其表面往往会粘附有灰尘颗粒,影响导航仪的清晰度,尤其是对敞篷汽车来说,导航仪表面更加易粘附灰尘,而且导航仪无法调整角度的问题。
[0005]
为实现上述目的,本实用新型提供如下技术方案:一种人工智能导航仪,包括导航仪显示屏、储尘盒和可调节底座,所述导航仪显示屏表面边缘处设置有吸尘条,且导航仪显示屏背面边缘连接有吸尘通道,所述吸尘通道末端连接有集尘盒,且集尘盒内壁底部通过螺丝与微型抽气泵相连接,所述集尘盒中部开设有卡槽,且卡槽内部设置有卡条,所述储尘盒连接于卡条内端,且储尘盒内壁底部内嵌有捕尘网,所述可调节底座连接于导航仪显示屏外壁底部,所述可调节底座包括第一阻尼转轴、支杆、第二阻尼转轴和固定底座,且第一阻尼转轴底部连接有支杆,所述支杆底部设置有第二阻尼转轴,且第二阻尼转轴底部连接有固定底座。
[0006]
优选的,所述吸尘通道呈u形状,且吸尘通道通过吸尘通道与集尘盒之间构成连通结构。
[0007]
优选的,所述储尘盒通过卡条、卡槽与集尘盒之间构成卡合结构,且储尘盒通过捕尘网与微型抽气泵之间构成连通结构。
[0008]
优选的,所述导航仪显示屏与第一阻尼转轴之间呈固定连接,且导航仪显示屏通过第一阻尼转轴构成倾斜结构。
[0009]
优选的,所述导航仪显示屏通过第二阻尼转轴与固定底座之间构成转动结构,且固定底座与导航仪显示屏之间呈平行状分布。
[0010]
优选的,所述第一阻尼转轴、支杆、第二阻尼转轴、固定底座与导航仪显示屏五者的竖直中心线相互重合,且第二阻尼转轴与固定底座之间呈固定连接。
[0011]
与现有技术相比,本实用新型的有益效果是:该人工智能导航仪,通过微型抽气泵可在吸尘条内侧面进行吸尘作业,而吸尘条分布于导航仪显示屏边缘处,从而有利于避免灰尘颗粒粘附在导航仪显示屏表面,同时亦不会遮挡人们视线,有利于保证导航仪显示屏
的清晰度。
[0012]
该人工智能导航仪,灰尘颗粒被吸入吸尘条中,再沿着吸尘通道进入集尘盒内部,直至被吸附于储尘盒底部的捕尘网表面,该设置有利于对灰尘颗粒进行收集捕捉,避免灰尘颗粒被吸入微型抽气泵内部,同时储尘盒是由其顶部与底部的卡条卡入集尘盒中部的卡槽内完成储尘盒的连接,后期可通过单手握持储尘盒向外拉动即可将其取下,方便后期对储尘盒内部的灰尘进行倾倒及清理。
[0013]
该人工智能导航仪,握持导航仪显示屏边缘处前后用力可使其通过第一阻尼转轴进行活动,使得导航仪显示屏倾斜化调整纵向角度,同时握持导航仪显示屏边缘处左右用力可使其通过第二阻尼转轴转动从而调节水平角度,该设置有利于提高不同车座上的人们观看时的舒适度。
附图说明
[0014]
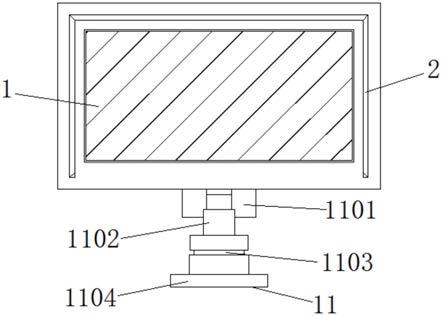
图1为本实用新型导航仪显示屏正视结构示意图;
[0015]
图2为本实用新型导航仪显示屏背视结构示意图;
[0016]
图3为本实用新型图2中a处放大结构示意图。
[0017]
图中:1、导航仪显示屏;2、吸尘条;3、吸尘通道;4、集尘盒;5、螺丝;6、微型抽气泵;7、卡槽;8、卡条;9、储尘盒;10、捕尘网;11、可调节底座;1101、第一阻尼转轴;1102、支杆;1103、第二阻尼转轴;1104、固定底座。
具体实施方式
[0018]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0019]
请参阅图1-3,本实用新型提供技术方案:一种人工智能导航仪,包括导航仪显示屏1、储尘盒9和可调节底座11,导航仪显示屏1表面边缘处设置有吸尘条2,且导航仪显示屏1背面边缘连接有吸尘通道3,吸尘通道3末端连接有集尘盒4,且集尘盒4内壁底部通过螺丝5与微型抽气泵6相连接,吸尘通道3呈u形状,且吸尘通道3通过吸尘通道3与集尘盒4之间构成连通结构,吸尘通道3呈u形状设置于导航仪显示屏1表面边缘处可以全面对导航仪显示屏1表面区域内的灰尘颗粒进行收集,而灰尘颗粒被吸入吸尘条2 中,再沿着吸尘通道3进入集尘盒4内部,有利于对灰尘进行传输储存,避免灰尘颗粒飘散;
[0020]
集尘盒4中部开设有卡槽7,且卡槽7内部设置有卡条8,储尘盒9连接于卡条8内端,且储尘盒9内壁底部内嵌有捕尘网10,储尘盒9通过卡条8、卡槽7与集尘盒4之间构成卡合结构,且储尘盒9通过捕尘网10与微型抽气泵6之间构成连通结构,灰尘颗粒被吸入吸尘条2中,再沿着吸尘通道3进入集尘盒4内部,直至被吸附于储尘盒9底部的捕尘网10表面,该设置有利于对灰尘颗粒进行收集捕捉,避免灰尘颗粒被吸入微型抽气泵6内部,同时储尘盒9是由其顶部与底部的卡条8卡入集尘盒4中部的卡槽7内完成储尘盒9的连接,后期可通过单手握持储尘盒9向外拉动即可将其取下,方便后期对储尘盒9内部的灰尘进行倾倒及清理;
[0021]
可调节底座11连接于导航仪显示屏1外壁底部,可调节底座11包括第一阻尼转轴
1101、支杆1102、第二阻尼转轴1103和固定底座1104,且第一阻尼转轴1101底部连接有支杆1102,支杆1102底部设置有第二阻尼转轴 1103,且第二阻尼转轴1103底部连接有固定底座1104,导航仪显示屏1与第一阻尼转轴1101之间呈固定连接,且导航仪显示屏1通过第一阻尼转轴1101 构成倾斜结构,导航仪显示屏1通过第二阻尼转轴1103与固定底座1104之间构成转动结构,且固定底座1104与导航仪显示屏1之间呈平行状分布,第一阻尼转轴1101、支杆1102、第二阻尼转轴1103、固定底座1104与导航仪显示屏1五者的竖直中心线相互重合,且第二阻尼转轴1103与固定底座1104 之间呈固定连接,握持导航仪显示屏1边缘处前后用力可使其通过第一阻尼转轴1101进行活动,使得导航仪显示屏1倾斜化调整纵向角度,同时握持导航仪显示屏1边缘处左右用力可使其通过第二阻尼转轴1103转动从而调节水平角度,该设置有利于提高不同车座上的人们观看时的舒适度,且导航仪显示屏1与第一阻尼转轴1101之间呈固定连接方便推力的传动,而且第一阻尼转轴1101、支杆1102、第二阻尼转轴1103、固定底座1104与导航仪显示屏 1五者的竖直中心线相互重合有利于提高导航仪显示屏1的稳定性,并且固定底座1104与导航仪显示屏1之间呈平行状分布有利于避免导航仪显示屏1发生歪斜。
[0022]
工作原理:在使用该一种人工智能导航仪时,首先将固定底座1104固定于车体内部,固定底座1104底部设置有粘附胶层方便固定,而微型抽气泵6 的电源线与车体电源相连接,当车体启动时,微型抽气泵6可在吸尘条2内侧面进行吸尘作业,而吸尘条2分布于导航仪显示屏1边缘处,从而有利于避免灰尘颗粒粘附在导航仪显示屏1表面,同时亦不会遮挡人们视线,有利于保证导航仪显示屏1的清晰度,然后灰尘颗粒被吸入吸尘条2中,再沿着吸尘通道3进入集尘盒4内部,直至被吸附于储尘盒9底部的捕尘网10表面,该设置有利于对灰尘颗粒进行收集捕捉,避免灰尘颗粒被吸入微型抽气泵6 内部,同时储尘盒9是由其顶部与底部的卡条8卡入集尘盒4中部的卡槽7 内完成储尘盒9的连接,后期可通过单手握持储尘盒9向外拉动即可将其取下,方便后期对储尘盒9内部的灰尘进行倾倒及清理,最后握持导航仪显示屏1边缘处前后用力可使其通过第一阻尼转轴1101进行活动,使得导航仪显示屏1倾斜化调整纵向角度,同时握持导航仪显示屏1边缘处左右用力可使其通过第二阻尼转轴1103转动从而调节水平角度,该设置有利于提高不同车座上的人们观看时的舒适度。
[0023]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1