一种基于超声波的螺栓轴向应力测量装置的制作方法
[0001]
本实用新型涉及螺栓预紧力检测技术领域,尤其涉及一种基于超声波的螺栓轴向应力测量装置。
背景技术:
[0002]
螺栓通过螺纹产生应力以紧固被夹紧件的产品,被广泛地应用于各种机械设备。螺栓法兰联接是风力发电、压力容器、石油化工设备及管道中应用极为广泛的一种可拆式静密封联接结构。在螺栓联接中,螺栓在安装的时候都必须拧紧,即在联接承受工作载荷之前,预先受到力的作用,这个预加的作用力称为预紧力,预紧的目的在于增强联接的可靠性和紧密性,以防止受载后被联接件间出现缝隙或发生相对滑移。所以,在法兰螺栓联接中,准确的预紧力值,良好的控制精度对控制接合面的泄漏有重要的作用。
[0003]
法兰螺栓连接系统的主要失效形式是泄漏,而螺栓预紧是保证连接面不发生泄漏的重要环节之一。工程上大多数螺栓力检测技术不适用于螺栓法兰接头或对螺栓力有所损伤,因此需要一种无损的螺栓力在线检测方法,对螺栓进行实时监测,以获取准确的预紧力值。而温度效应将导致螺栓杆产生热应力,并影响螺栓连接部位的安全性,因此监测温度效应下的螺栓杆所受热应力和预紧力对其工作状态的判断更加有效,对螺栓预紧力的施加还具有指导意义。
[0004]
迄今为止,国内外在使用超声无损探测技术对螺栓的预紧力进行测量这方面的研究,已经得到了一定的成果,共同的基本原理,是基于超声波波速随传播介质应力状态变化而变化的现象,即声弹性现象,该现象不论在弹性范围还是非线性应力-应变范围均存在。现有超声应力测量技术中,不考虑温度效应的超声测螺栓应力手段,将导致螺栓杆产生的热应力被忽略,这导致在常温下标定的结果将不再适用于高温或者低温的工作环境,影响螺栓连接部位监测结果的安全性判断,影响对生产安装维护时螺栓预紧力的施加。专利申请公布号为cn109883664a的风电螺栓实时监控与诊断系统,该专利提及到温度对于超声测量应力的影响,也提供了用于进行温度补偿的温度传感器,但是没有给出如何使用温度对超声应力的测量结果进行补偿。专利申请公布号为cn111208207a的基于超声测量的螺栓轴向应力测试装置,提供了一种试验手段和试验设备,基于经验和试验,对预紧螺栓的超声监测得到了补偿,但是该试验设备需要将高低温试验箱和拉伸试验机相结合,并且需要多组标定,复杂度较高,成本较高。
技术实现要素:
[0005]
鉴于此,本实用新型提供一种基于超声波的螺栓轴向应力测量装置,能够测量得到任意温度下的螺栓轴向应力。
[0006]
为实现上述目的,本实用新型提供一种基于超声波的螺栓轴向应力测量装置,包括超声波测量装置、温度测量装置和微处理器,所述微处理器分别与所述超声波测量装置和温度测量装置相连接,其中,
[0007]
所述超声波测量装置将测量得到的超声波在螺栓中的声时差信号发送至所述微处理器;
[0008]
所述温度测量装置将测量得到的螺栓温度信号发送至所述微处理器;
[0009]
所述微处理器包括温度补偿单元和处理单元,其中,
[0010]
所述温度补偿单元将获取的至少三次测量的超声波的第一声时差t0、第二声时差t
a
和第三声时差t
b
输入一矩阵公式得到系数a、b、c和d,并根据所述系数得到螺栓温度、轴向应力和声时差的函数关系式,并将所述函数关系式输入至所述处理单元,其中,所述三次测量包括在第一螺栓温度t0和第一预应力f0的条件下第一次测量得到的第一声时差t0,第一螺栓温度t0和第一预应力f1的条件下第二测量得到的第二声时差t
a
,第二螺栓温度t1和第一预应力f0的条件下第三次测量得到的第三声时差t
b
;
[0011]
所述矩阵公式满足;
[0012][0013]
δt
a
=t
a-t0,δt
b
=t
b-t0,
[0014]
所述函数关系式为:a
·
t+b
·
f+c
·
δt+d=0,δt为当前超声波在螺栓中的声时差,t为当前螺栓温度,f为当前轴向应力;
[0015]
所述处理单元将接收到的当前螺栓温度和当前超声波在螺栓中的声时差输入到所述螺栓温度、轴向应力和声时差的函数关系式中,得到并输出螺栓的当前轴向应力。
[0016]
优选的,所述螺栓预紧力测量装置包括一探测头,所述超声波测量装置包括第一压电晶片和第二压电晶片,所述温度测量模块包括热敏电阻,所述第一压电晶片、第二压电晶片和热敏电阻被一起封装所述探测头的顶端。
[0017]
优选的,所述第一压电晶片与所述微处理器相连接,所述第二压电晶片与所述微处理器相连接,所述热敏电阻与所述微处理器相连接,其中,
[0018]
所述第一压电晶片产生超声波使其在螺栓中传播;
[0019]
所述第二压电晶片接收所述超声波在螺栓传播返回的信号并转换为脉冲电信号,发送至所述微处理器;
[0020]
所述微处理记录接收的脉冲电信号的接收时间,将所述接收时间和发送时间进行差值运算,就得到所述超声波在螺栓中的声时差;
[0021]
所述热敏电阻测量所述螺栓温度,并将所述螺栓温度发送至微处理器。
[0022]
优选的,第一次测量条件设为第一螺栓温度t0为300k以及第一预应力f0为0kn;第二次测量条件设为第一螺栓温度t0为300k以及第二预应力f1为1000kn;第三次测量条件设为第二螺栓温度t1为350k以及第一预应力f0为0kn。
[0023]
优选的,所述处理单元根据所述螺栓温度、轴向应力和声时差的函数关系,生成所述螺栓温度、轴向应力和声时差三者关系所对应的分析图谱,并基于所述分析图谱,当测量得到螺栓工作温度和超声波的声时差时,在所述分析图谱中确定唯一的螺栓轴向应力。
[0024]
优选的,所述处理单元还基于所述分析图谱,当测量得到螺栓的轴向应力和超声波的声时差时,在所述分析图谱中确定唯一的螺栓工作温度。
[0025]
与现有技术相比,本实用新型提供的一种基于超声波的螺栓轴向应力测量装置,所带来的有益效果为:本实用新型仅需要三次测量,就可以得到螺栓在任意温度和任意预应力下的超声波测量规律,能够确定螺栓预应力和温度补偿效果的共同作用,应用于任意温度下的预紧力测量,不用在不同温度下进行重复标定;该技术方案更加简便、见效更快,并且覆盖面更广;将螺栓应力测量部分和温度测量部分集成一个统一个探头上,不需要使用恒温箱等额外的附加设备;将超声波测量螺栓轴向应力的特性曲线和温度与预应力的特性曲线相结合,提供了综合应力和温度的特征图谱,能够更加方便应用于超声检测仪进行现场螺栓检测;提供有效的测量随温度变化的超声测量螺栓轴向应力的技术方案。
附图说明
[0026]
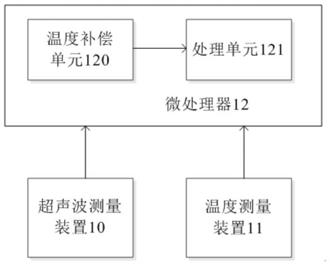
图1是根据本实用新型的一个实施例的基于超声波的螺栓轴向应力测量装置的系统示意图。
[0027]
图2是根据本实用新型的一个实施例的探测头示意图。
[0028]
图3是根据本实用新型的一个实施例的螺栓温度、预紧力和声时差三者关系所对应的分析图谱。
[0029]
附图编号:201-第一压电晶片;202-第二压电晶片;203-热敏电阻;13-微处理器。
具体实施方式
[0030]
以下将结合附图所示的具体实施方式对本实用新型进行详细描述,但这些实施方式并不限制本实用新型,本领域的普通技术人员根据这些实施方式所做出的结构、方法、或功能上的变换均包含在本实用新型的保护范围内。
[0031]
如图1所示的本实用新型的一个实施例,本实用新型提供一种基于超声波的螺栓轴向应力测量装置,包括超声波测量装置10、温度测量装置11和微处理器12,所述微处理器12分别与所述超声波测量装置10和温度测量装置相连接11,其中,所述超声波测量装置10将测量得到的超声波在螺栓中的声时差信号发送至所述微处理器12,所述温度测量装置11将测量得到的螺栓温度信号发送至所述微处理器12,所述微处理器12包括温度补偿单元120和处理单元121,其中,所述温度补偿单元120将获取的至少三次测量的超声波的第一声时差t0、第二声时差t
a
和第三声时差t
b
输入一矩阵公式得到系数a、b、c和d,并根据所述系数得到螺栓温度、轴向应力和声时差的函数关系式,并将所述函数关系式输入至所述处理单元,其中,所述三次测量包括在第一螺栓温度t0和第一预应力f0的条件下第一次测量得到的第一声时差t0,第一螺栓温度t0和第一预应力f1的条件下第二测量得到的第二声时差t
a
,第二螺栓温度t1和第一预应力f0的条件下第三次测量得到的第三声时差t
b
;
[0032]
所述矩阵公式满足;
[0033][0034]
δt
a
=t
a-t0,δt
b
=t
b-t0,
[0035]
所述函数关系式为:a
·
t+b
·
f+c
·
δt+d=0,δt为当前超声波在螺栓中的声时差,
t为当前螺栓温度,f为当前轴向应力;
[0036]
所述处理单元将接收到的当前螺栓温度和当前超声波在螺栓中的声时差输入到所述螺栓温度、轴向应力和声时差的函数关系式中,得到并输出螺栓的当前轴向应力,
[0037]
如图2所示,所述螺栓预紧力测量装置包括一探测头,所述超声波测量装置包括所述第一压电晶片201和第二压电晶片202,所述温度测量模块包括热敏电阻203,所述第一压电晶片201、第二压电晶片202和热敏电阻203被封装在一起安装在所述探测头的顶端,并贴合地安装在螺栓的顶部。在安装时需要在探头表面涂抹亲和剂,然后安装在螺栓顶部进行称和。所述第一压电晶片与所述微处理器相连接,所述第二压电晶片与所述微处理器相连接,所述热敏电阻与所述微处理器相连接。所述微处理产生脉冲电信号,并将该脉冲电信号施加到第一压电晶片,并记录该脉冲电信号的发送时间。通过对第一压电晶片施加脉冲电压,可以产生瞬间的膨胀和收缩,从而给紧贴着的螺栓一个脉冲的压力信号。所述第一压电晶片产生超声波,该超声波在螺栓中传播。所述第二压电晶片接收所述超声波在螺栓传播返回的信号并转换为脉冲电信号,发送至所述微处理器。所述微处理接收该脉冲电信号并记录接收时间,将所述接收时间和发送时间进行差值运算,就得到所述超声波在螺栓中的声时差。所述热敏电阻测量所述螺栓的温度,并将所述螺栓温度发送至微处理器。本实施例中采用压电晶片收集超声波信号,也可以替换为电磁超声环能器收集超声波信号。
[0038]
在通常情况下,材料的结构物性可由杨氏模量e与泊松比v定义,并且两者可由基于温度相关的分段函数t定义,并通过实验测量。目前对于工业运用的各种钢材,有详实的数据库可查询。
[0039]
基于杨氏模量e与泊松比ν定义的材料结构物性,可以转写为由拉梅(lam
é
)系数定义的物性,即第一拉梅系数参数λ:
[0040][0041]
第二拉梅系数参数μ:
[0042][0043]
在第一拉梅系数参数和第二拉梅系数参数的基础上加入三阶的超弹性系数修正l,m,n,所述超弹性系数修正通过实验测量得到,得到预紧力对声速的修正关系式以及声速关系式:
[0044][0045]
c
σ
=c0(1+c
l
σ);
[0046]
其中,c
σ
为预紧力影响下的声速,c0为无预紧力影响下的声速,c
l
为计算c
σ
的修正参数,σ为预紧力造成的螺栓单位长度形变。通过第二压电晶片转换的脉冲电信号,微处理器得到超声波在螺栓中的声时差,该声时差受到的影响包括声速大小,即预紧力和温度导致超声波的声速改变、声程的长度,还包括预紧力导致螺栓的形变以及热膨胀效应导致的形变。经过研究表明,在日常温度变化不大(-50k~100k)的情况下,并且预紧力没有导致材料发生塑形形变的情况下,这些影响可以近似视为线性关系。基于上述原理进行系数标定。
[0047]
温度补偿单元通过所述超声波测量装置和温度测量模块至少测量三次超声波的
传播时间,分别是在第一螺栓温度t0和第一预应力f0的条件下测量得到的第一声时差t0、在第一螺栓温度t0和第一预应力f1的条件下测量得到的第二声时差t
a
、以及第二螺栓温度t1和第一预应力f0的条件下测量得到的第三声时差t
b
,根据下面矩阵公式确定系数a、b、c和d;
[0048][0049]
其中,δt
a
=t
a-t0,δt
b
=t
b-t0。具体地,第一次测量:通过热敏电阻测量螺栓工作在第一螺栓温度t0为300k,通过外部应力拉伸设备给螺栓施加第一预应力f0为0kn的条件下,微处理器产生脉冲电信号施加至第一压电晶片,第一压电晶片激励超声波信号并在螺栓中传播,第二压电晶片接收到回波信号并转换为脉冲电信号发送给微处理器,微处理器得到该超声波的第一声时差t0。同样的,第二次测量:在第一螺栓温度t0为300k和第二预应力f1为1000kn的条件下测量得到的第二声时差t
a
;第三次测量:在第二螺栓温度t1为350k和第一预应力f0为0kn的条件下测量得到的第三声时差t
b
。基于测量的三组数据,根据上述的矩阵公式计算得到系数a、b、c和d。本实施例中,采用了三次测量数据就可实现系数标定。但是采用更多组的测量数据进行系数标定,以实现更高的精度,也属于本实用新型的范围之内。
[0050]
所述温度补偿单元根据所述系数得到螺栓温度、轴向应力和声时差的函数关系,基于该函数关系确定所述螺栓的当前轴向应力,其中,所述函数关系式为:
[0051]
a
·
t+b
·
f+c
·
δt+d=0;
[0052]
其中,δt为当前超声波在螺栓中的声时差,t为当前螺栓温度,f为当前轴向应力。所述δt通过所述声速的修正关系式以及声速关系式进行计算得到。基于上述平面公式,在给定温度t的情况下,螺栓预紧力f和声时差具有一一对应的关系,由此可以获取不同温度下超声波的声时差和轴向应力的关系。所述处理单元将接收到的当前螺栓温度和当前超声波在螺栓中的声时差输入到所述螺栓温度、轴向应力和声时差的函数关系式中,得到并输出螺栓的当前轴向应力。通过热敏电阻测量得到当前螺栓的工作温度,以及通过超声波测量装置测量得到当前超声波的在螺栓中的声时差,再根据该平面公式,就可以对应得到当前螺栓的预紧力。
[0053]
根据本实用新型的一具体实施例,所述处理单元根据所述螺栓温度、轴向应力和声时差的函数关系,生成所述螺栓温度、轴向应力和声时差三者关系所对应的分析图谱,如图3所示,图中f表示轴向应力,t表示声时差。基于该分析图谱,当测量得到螺栓工作温度和超声波的声时差时,在所述分析图谱中确定唯一的螺栓轴向应力;或者基于该分析图谱,当测量得到螺栓的轴向应力和超声波的声时差时,在所述分析图谱中确定唯一的螺栓工作温度。
[0054]
根据本实用新型的一具体实施例,所述微处理器包括一烧录模块,将所述螺栓温度、轴向应力和声时差的函数关系烧录至所述微处理。在螺栓预紧力测量过程中,微处理根据获取的当前螺栓的工作温度和超声波的声时差,计算得到对应的轴向应力。本实用新型的再一实施例,微处理器将获取的当前螺栓的工作温度和超声波的声时差发送至云端服务器,所述云端服务器根据所述螺栓温度、轴向应力和声时差的函数关系计算得到对应的轴向应力。
[0055]
尽管为示例目的,已经公开了本实用新型的优选实施方式,但是本领域的普通技术人员将意识到,在不脱离由所附的权利要求书公开的本实用新型的范围和精神的情况下,各种改进、增加以及取代是可能的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1