一种实现飞行时间域全探测的主动成像装置及成像方法与流程
1.本发明属于激光技术、光电探测、机器视觉领域,特别涉及一种实现飞行时间域全探测的主动成像装置及成像方法。
背景技术:
2.主动激光距离选通成像在复杂环境(水下、雨雾等)下的远距离探测、目标三维成像等方面具有重要应用。距离选通成像采用了时分的思想来规避介质(大气、水体)背向散射的影响。激光脉冲出射后,计算其照射到目标后被反射回来的时刻,然后探测器打开快门,对目标进行成像。在这整个过程中,只有当目标反射的激光脉冲返回到探测器的短暂时间内,探测器的快门才打开,其它时间快门一直处于关闭状态,从而抑制了介质背向散射影响,可以提高系统的探测信噪比。
3.距离选通可以提高探测信噪比,但是在单次探测只对某个固定距离处的场景进行探测,存在探测效率低、探测范围较小的缺点。面对未知距离目标,距离选通需要通过不停切换探测距离来搜索目标。如目标位于10m处,距离选通可能需要从1m,2m,
…
依次搜索,最后才能确定目标的位置。即使最后搜索到目标,距离选通又只能对目标处的小景深范围成像,而不能兼顾景深范围外的场景。如目标位于10m处,距离选通成像可能只能对10m
±
1m处的场景成像,那么0
‑
9m处的场景则不能看到。
4.因此,如何既能发挥距离选通探测的优点,又能扩大距离选通的探测范围,对于距离选通成像的实际应用具有重要意义。针对这一问题,文献“一种距离选通激光雷达全景深成像的编码方法”(申请号:201811470053.4),给出了单帧图像内分配多激光脉冲探测扩大成像范围的思路。
5.以上思路虽然能够扩大距离选通的成像范围,但是却要求在不同距离位置分配多个激光脉冲,时序控制较复杂,降低了激光脉冲的使用效率(以牺牲成像帧频为代价)。同时,在近距离位置分配高峰值功率激光脉冲也容易增加背向散射干扰,降低成像信噪比。
技术实现要素:
6.本发明提出一种实现飞行时间域全探测的主动成像装置及成像方法,无需复杂编码分配,无需降低成像帧频,但是可以有效扩大距离选通的成像范围,且保证较高的系统信噪比。
7.为实现上述目的,现提供技术方案如下:
8.一种基于调制脉冲激光实现飞行时间域全探测的主动成像装置,
9.调制脉冲激光器:产生调制脉冲激光,产生带有拖尾形状的调制脉冲激光,通过扩束镜将调制脉冲激光发射到探测目标;通过减慢调q开关的关断速度产生带有拖尾形状的脉冲激光。激光的包括波峰和拖尾两部分。波峰部分在20ns以内,拖尾一般在500ns以内。波峰部分的光能量占整个光脉冲能量的90%以上。产生的调制脉冲激光,通过扩束镜将调制脉冲激光发射到探测目标;
10.接收光学系统:接收探测目标反射的光源信息;
11.探测器:对目标反射的激光进行探测成像;
12.控制器:对调制脉冲激光器和探测器进行同步,记录调制脉冲激光的出射时刻,同时开始利用高精度时钟进行延时,当延时到一定时刻(对应目标反射激光到达时刻),打开探测器的快门,开门一定时间后,探测器关门;
13.图像模块:通过gpu芯片进行图像处理。
14.进一步的,所述调制脉冲激光器选用532nm固定激光器。
15.进一步的,所述探测器使用iccd探测器或emccd探测器,具备ns级快门、1万倍以上的增益。
16.进一步的,所述控制系统包括fpga芯片,fpga芯片内设置有时间数字转换模块。
17.一种基于调制脉冲激光实现飞行时间域全探测的主动成像方法,包括:
18.步骤1、调制脉冲激光器产生调制脉冲激光,调制脉冲激光具备一定的拖尾;
19.步骤2、对目标反射的激光进行探测成像;
20.步骤3、控制器对脉冲激光和探测器进行同步;
21.步骤4、成像景深计算。
22.进一步的,步骤3中,记录调制脉冲激光的出射时刻,同时开始利用数字芯片产生利用高精度时钟进行延时,当延时到一定时刻,打开探测器的快门,开门一定时间后,探测器关门。
23.进一步的,步骤4中,成像景深的总范围为
[0024][0025]
其中:光波峰宽度为tp,拖尾宽度为ta,选通延时为td,探测器快门开门时间为tg,则距离选通对处进行选通成像,激光波峰决定前景深范围为激光波峰决定前景深范围为探测器快门开门时间决定后景深范围为
[0026]
通过在电光调q晶体上加载带有拖尾脉冲形状的电压,可以减慢电光调q开关的关闭速度,使ta>td,总成像范围为达到通视探测效果。
[0027]
本发明的有益效果:
[0028]
本发明相对于常规距离选通成像,在不影响激光选通成像的效果下,提高了选通成像的探测范围,扩大了景深,在未知目标的前提下,有利于提高距离选通成像的目标搜索效率。
[0029]
本发明相对于激光脉冲编码分配实现通视探测的方法,激光能量利用率高,无需降低成像帧频。
附图说明
[0030]
图1—常规高斯脉冲激光距离选通成像方法;
[0031]
图2—基于调制脉冲激光实现全域探测的方法;
[0032]
图3—时间距离卷积包络成像范围示意图;
[0033]
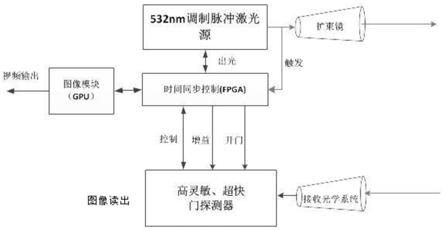
图4—水下激光调制脉冲距离选通成像连接图;
[0034]
图5—调制脉冲激光通过扩束镜将调制脉冲激光发射到探测目标的线路图。
具体实施方式
[0035]
为使本领域技术人员更加清楚和明确本发明技术方案,下面结合附图对本发明技术方案进行详细描述,但本发明的实施方式不限于此。
[0036]
一种基于调制脉冲激光实现飞行时间域全探测的主动成像方法,以水下激光飞行时间域全探测实现为例
[0037]
调制脉冲激光器:产生调制脉冲激光,通过扩束镜将调制脉冲激光发射到探测目标;水下探测为了减少光的吸收和散射,选用532nm激光。现在成熟的532nm激光器一般为固定激光器。目前532nm固体激光器产生脉冲激光,有电光调q、声光调q、被动调q等方式;
[0038]
这里,为了较好控制激光脉冲拖尾形状,可选用电光调q。电光调q通过调节调q晶体上的高压脉冲时间控制其关断特性,使得激光脉冲存在较长的拖尾。水下探测,激光波峰宽度控制在10ns以内,拖尾在200
‑
400ns左右。其中波峰集中了激光脉冲90%以上的能量。
[0039]
这里,为了控制激光脉冲拖尾,选用声光调q532nm激光器。通过调节声光调q晶体的关断特性和倍频晶体的位置,使得激光脉冲存在较长的拖尾。激光波峰宽度在5
‑
15ns左右,拖尾在100
‑
200ns左右。拖尾处的激光能量远小于波峰处的激光能量,满足要求。
[0040]
如图5所示,在532nm光腔的基础上,通过在电光调q晶体上加载带有拖尾脉冲形状的电压,可以减慢电光调q开关的关闭速度。其中,光泵浦源采用808nm半导体激光器,nd:yvo4为增益介质,倍频晶体采用ktp非线性晶体。通过减慢电光调q的关闭速度,激光在正常出光后,由于电光晶体没有完全关闭,仍然会保留一小部分的光输出,作为拖尾光。拖尾光的时间宽度可以通过脉冲电压的拖尾宽度调节。
[0041]
接收光学系统:接收探测目标反射的光源信息。
[0042]
探测器:对目标反射的激光进行探测成像,测器使用iccd探测器或emccd探测器,具备ns级快门、1万倍以上的增益。选通成像要求探测器必需具备高速开关功能、高分辨率、高灵敏度、低噪声。由于曝光时间很短,接收光很弱,探测器同时需要具备微光放大功能和足够的增益动态范围;
[0043]
以iccd探测器为例,一般包含像增强器、耦合光纤光锥、ccd芯片等组件。像增强器的光电阴极可以在200v以上的高压驱动下进行ns级的开门和关断,满足成像快门要求。像增强器内部的微通道板可以加载500
‑
1000v的高压,对光电子进行放大,起到信号增益放大效果。
[0044]
图2展示了激光脉冲时间域与探测器选通门时间域卷积作用下得到的时空对应关系,纵轴为时间轴,横轴为距离。这里,将激光波形拆解为两部分,一部分为激光波峰a,一部分为激光拖尾b,为了便于计算,两者均等效为方波。
[0045]
a阴影区是激光波峰和选通门脉冲卷积得到的区域,投影到横轴上即为激光波峰的成像范围。
[0046]
b阴影区是激光拖尾和选通门脉冲卷积得到的区域,投影到横轴上即为激光拖尾的成像范围。
[0047]
当激光拖尾时间足够长,则b阴影区可以扩展到位置零点,可实现通视探测效果。
激光拖尾能量远小于波峰能量,在不影响激光波峰选通成像范围的基础上,拖尾成像可以有效扩大系统的成像范围。
[0048]
控制系统:对调制脉冲激光器和探测器进行同步,记录调制脉冲激光的出射时刻,同时开始利用高精度时钟进行延时,当延时到一定时刻(对应目标反射激光到达时刻),打开探测器的快门,开门一定时间后,探测器关门;控制系统包括fpga芯片,fpga芯片内设置有时间数字转换模块,通过集成有时钟分相、进位链等高精度tdc(时间数字转换)定时技术,实现百ps级的延时。根据选通的目标距离,确定光子飞行的返回时间,并计时。当计时结束后,生成选通脉冲,打开探测器的快门。
[0049]
成像景深计算:根据激光距离选通成像时序,成像的景深范围由激光脉宽时间、探测器快门开门时间、选通延时决定。其中,选通延时决定成像的中心位置,即对特定位置的距离进行选通探测;激光脉宽决定成像的前景深范围,探测器快门开门时间决定成像后景深范围。
[0050]
如图1所示,传统激光选通成像一般采用高斯脉冲激光(可近似为方波)进行选通,设激光脉冲宽度为tp,选通延时为td,探测器快门开门时间为tg,以光源和探测器所在的位置为距离零点,则距离选通对处进行选通成像,c为光速,n为介质的折射率。激光脉宽决定成像前景深范围为探测器快门开门时间决定后景深范围为因此,总的成像范围为增大高斯脉冲宽度tp可以扩大前景深成像范围,但是也会增大近距离处的曝光,增加背向散射,降低距离选通的效果。
[0051]
因此,本方案中采用调制脉冲激光替代高斯脉冲激光。如图2所示,激光脉冲被调制为波峰和拖尾两部分。其中波峰集中了激光脉冲90%以上的能量,且波峰的宽度远远小于拖尾。距离选通成像时,利用波峰的能量对目标处进行探测,利用波尾的能量对系统和目标之间的位置进行探测。这样,在保证目标高信噪比的前提下,达到通视探测的效果。
[0052]
设激光波峰宽度为tp,拖尾宽度为ta,选通延时为td,探测器快门开门时间为tg,则距离选通对处进行选通成像,激光波峰决定前景深范围为激光波峰决定前景深范围为探测器快门开门时间决定后景深范围为因此,总的成像范围为
[0053]
通过调节激光调q关断效果,可以使ta>td,则由于实际探测范围不能小于0,则总成像范围为达到通视探测效果。
[0054]
假设激光的波峰半宽tp为10ns,探测器开门延迟时间td为100ns,探测器开门时间tg为10ns,水体折射系数为1.33,光速为3*108m/s。
[0055]
如果激光脉冲无拖尾,以光源和探测器所在的位置为距离零点,常规的方波脉冲
激光或高斯脉冲激光的成像范围为激光或高斯脉冲激光的成像范围为
[0056]
如果通过本方法调制激光脉冲,使激光脉冲存在100ns以上的拖尾,则本方法的成像范围为同时,由于激光能量大部分集中于11.3m
±
1.13m,并不影响常规激光选通成像的效果。
[0057]
以上所述,仅是本发明的最佳实施例而已,并非对本发明的任何形式的限制,任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下利用上述揭示的方法和内容对本发明做出的许多可能的变动和修饰,均属于权利要求书保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1