一种基于图像测量的薄膜材料泊松比测试装置及测试方法与流程
1.本发明涉及薄膜材料泊松比的几何测量技术领域,具体为一种薄膜材料泊松比的非接触几何测量法。
背景技术:
2.薄膜材料广泛应用于机械设计、航空航天、装备制造、医疗仪器等众多领域,例如,乙烯-四氟乙烯共聚物薄膜以其良好的透光性和延伸性成为一种应用广泛的透明建筑材料,薄膜材料的力学表征对其结构的可靠性和安全性评估起到至关重要的作用。随着电子及生物材料的发展,作为结构件的薄膜会受到相当大的拉伸或弯曲应力,材料的变形及泊松比变化会对整个构件的力学性能起到决定性的作用。
3.传统测试材料应变及泊松比的方法为接触式引伸计法,确定材料的泊松比主要通过在轴向和径向上布置引伸计,通过引伸计测试的应变结果得到材料的泊松比。对于薄膜材料而言,薄膜的厚度在几十微米到几百微米之间,材料的硬度较小,接触式引伸计的方法不适用。本发明针对以上不足,采用数字图形测量技术对薄膜材料的应变及泊松比进行测试。
技术实现要素:
4.针对现有技术存在无法对薄膜材料应变及泊松比进行实时测量的问题,本发明提供了一种基于数字图像测量技术的薄膜材料应变及泊松比的测试装置及测试方法。
5.为实现上述目的,本发明提供如下技术方案:一种基于图像测量的薄膜材料应变及泊松比测试装置,该装置包括轴向加载系统、图像测量系统、试样夹持系统;
6.所述轴向加载系统主要由横梁、机架、力传感器以及控制台、连接座、连接杆构成;
7.所述机架和连接座均安装在控制台的上方,机架上横向安装横梁,所述力传感器安装在横梁上;
8.所述轴向加载系统通过驱动部件带动横梁运动,对试样提供载荷力;
9.所述图像测量系统主要由相机、导轨、导轨平台构成,相机通过导轨控制与试样的距离;
10.所述试样夹持系统主要由夹板和u型卡座构成,所述夹板安装在u型卡座内部,通过所述夹板实现对试样进行夹持;
11.所述u型卡座设置有一对,其中一个通过连接杆连接力传感器,另外一个通过连接座连接控制台。
12.在进一步的的方案中,所述夹板由内夹头和外廓部组成,所述内夹头设置在外廓部内侧,通过气压缸连接连通管,连通管与内夹头相连,在左右的内夹头对称固定的情况下,内夹头对试样端部施加恒定的夹持力,既保证薄膜材料的表面平整又维持拉伸过程中夹持力的稳定。
13.在进一步的的方案中,所述夹板通过螺栓固定安装在u型卡座上,通过螺栓固定内
夹头的夹头面,使薄膜试样表面保持自然平整状态。
14.在进一步的的方案中,内置于机架中的伺服电机驱动滚珠丝杠带动横梁的做上下的直线运动。
15.一种基于图像测量的薄膜材料变形及泊松比测试的方法,包括以下步骤:
16.1)将薄膜材料安装于内夹头之间,通过对称螺栓固定内夹头的相对位置,使两个内夹头对正且薄膜下部处于自然平展状态;
17.2)启动气压缸,使内夹头内壁夹紧薄壁材料,并维持内夹头端部的恒定压力;
18.3)启动图像测量系统,确定薄壁材料标记点的初始坐标位置,启动伺服电机,维持恒定的速率对薄壁材料进行拉伸,记录拉伸过程中标记点的位置的相对变化,试样表面印制有m
×
n行方格,第1行第1列方格角点坐标为(x
11
,y
11
)、(x
12
,y
12
)、(x
21
,y
21
)、(x
22
,y
22
),则第m行n列的坐标为(x
(2m-1)(2n-1)
,y
(2m-1)(2n-1)
)、(x(
2m-1)2n-1
,y(
2m-1)(2n)
)、(x
(2m)(2n-1)
,y
(2m)(2n-1)
)、(x
(2m)(2n)
,y
(2m)(2n)
),采用竖向边缘标记点位移变化确定试样的竖向应变,初始时刻第i列方格左侧竖向边缘角点的距离为:
19.l
i(0)
=y
(2m)(2i-1)(0)-y
1(2i-1)(0)
20.式中,l
i(0)
为初始时刻第i列方格左侧竖向边缘角点距离,y
1(2i-1)(0)
、y
(2m)(2i-1)(0)
分别为初始时刻第i列第1行方格左上侧纵坐标和第i列第m行左下侧纵坐标;
21.t时刻第i列方格左侧竖向边缘角点的距离为:
22.l
i(t)
=y
(2m)(2i-1)(t)-y
1(2i-1)(t)
23.式中,l
i(t)
为t时刻第i列方格左侧竖向边缘角点距离,y
1(2i-1)(t)
、y
(2m)(2i-1)(t)
分别为t时刻第i列第1行方格左上侧角点纵坐标和第i列第m行左下侧角点纵坐标;
24.同理,初始时刻与t时刻第i列方格右侧竖向边缘角点的距离为:
25.r
i(0)
=y
(2m)(2i)(0)-y
1(2i)(0)
26.r
i(t)
=y
(2m)(2i)(t)-y
1(2i)(t)
27.式中,r
i(0)
、r
i(t)
分别为初始时刻和t时刻第i列方格右侧竖向边缘角点距离,y
1(2i)(0)
、y
(2m)(2i)(0)
分别为初始时刻第i列第1行方格右上侧纵坐标和第i列第m行右下侧纵坐标;y
1(2i)(t)
、y
(2m)(2i)(t)
分别为t时刻第i列第1行方格右上侧纵坐标和第i列第m行右下侧纵坐标;
28.则t时刻试样的竖向应变εv的表达式为:
[0029][0030]
式中,ε
v(t)
为t时刻试样的竖向应变;
[0031]
初始时刻、t时刻第j行方格上侧横向边缘角点的距离为:
[0032]dj(0)
=x
(2j-1)(2n)(0)-x
(2j-1)1(0)
[0033]dj(t)
=x
(2j-1)(2n)(t)-x
(2j-1)1(t)
[0034]
式中,d
j(0)
、d
j(t)
分别为初始时刻、t时刻第j行方格上侧横向边缘角点的距离,x
(2j-1)(2n)(0)
、x
(2j-1)1(0)
分别为初始时刻第j行第n列方格右上侧角点横坐标、第j行第1列方格左上侧角点横坐标,x
(2j-1)1(t)
、x
(2j-1)2n(t)
分别为t时刻第j行第1列方格左上侧角点横坐标、第j行第n列方格右上侧角点横坐标;
[0035]
初始时刻、t时刻第j行方格下侧横向边缘角点的距离为:
[0036]sj(0)
=x
(2j)(2n)(0)-x
(2j)1(0)
[0037]sj(t)
=x
(2j)(2n)(t)-x
(2j)1(t)
[0038]
式中,s
j(0)
、s
j(t)
分别为初始时刻、t时刻第j行方格下侧横向边缘角点的距离,x
(2j)1(0)
、x
(2j)(2n)(0)
分别为初始时刻第j行第1列方格左下侧角点坐标、第j行第n列方格右下侧角点坐标,x
(2j)1(t)
、x
(2j)(2n)(t)
分别为t时刻第j行第1列方格左下侧角点坐标、第j行第n列方格右下侧角点坐标;
[0039]
t时刻试样的横向应变的表达式为:
[0040][0041]
式中,ε
h(t)
为t时刻试样的横向应变;
[0042]
通过式(11)求得材料的泊松比:
[0043][0044]
式中,μ
(t)
时刻试样的泊松比。
[0045]
与现有技术相比,本发明的有益效果是:本发明采用非接触式数字图像测量技术,针对薄膜厚度、硬度较小的情况,夹具采用先固定后夹紧的技术措施,保持薄膜材料表面的自然平展状态,夹具在试样拉伸过程中提供恒定的夹持力,减少了试样与夹具接触部分的摩擦。采用数字图像测量技术,确定拉伸过程中薄壁材料任意时刻的应变及泊松比,为分析薄膜材料拉伸过程中的力学性质提供技术支持。
附图说明
[0046]
为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0047]
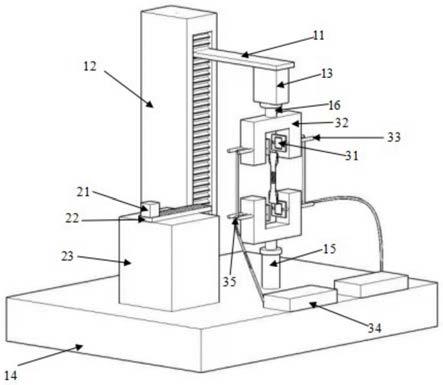
图1为测试装置整体结构示意图;
[0048]
图2为薄膜材料夹具的夹持原理图;
[0049]
图中:11.横梁,12机架,13力传感器,14.控制台,15.连接座,16.连接杆,21.相机,22.导轨,23.导轨平台,31.夹板,32.u型卡座,33.螺栓,34.气压缸,35.连通管,311.内夹头,312.外廓部。
具体实施方式
[0050]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0051]
请参阅图1-2,本发明提供一种技术方案:一种基于图像测量的薄膜材料应变及泊
松比测试装置,该装置包括轴向加载系统、图像测量系统、试样夹持系统;
[0052]
轴向加载系统主要由横梁11、机架12、力传感器13以及控制台14、连接座15、连接杆16构成,机架12和连接座15均安装在控制台14的上方,机架12上横向安装横梁11,力传感器13安装在横梁11上;轴向加载系统通过驱动部件带动横梁11运动,对试样提供载荷力,内置于机架12中的伺服电机驱动滚珠丝杠带动横梁11的做上下的直线运动。
[0053]
图像测量系统主要由相机21、导轨22、导轨平台23构成,相机通过导轨22控制与试样的距离;
[0054]
试样夹持系统主要由夹板31和u型卡座32构成,夹板31安装在u型卡座32内部,u型卡座32设置有一对,其中一个通过连接杆16连接力传感器13,另外一个通过连接座15连接控制台14。通过夹板31实现对试样进行夹持,夹板31由内夹头311和外廓部312组成,内夹头311设置在外廓部312内侧,通过气压缸34连接连通管35,连通管35与内夹头311相连,在左右的内夹头311对称固定的情况下,内夹头311对试样端部施加恒定的夹持力,既保证薄膜材料的表面平整又维持拉伸过程中夹持力的稳定;夹板31通过螺栓33固定安装在u型卡座32上,通过螺栓33固定内夹头311的夹头面,使薄膜试样表面保持自然平整状态。
[0055]
一种基于图像测量的薄膜材料变形及泊松比测试的方法,包括以下步骤:
[0056]
1)将薄膜材料安装于内夹头311之间,通过对称螺栓33固定内夹头311的相对位置,使两个内夹头311对正且薄膜下部处于自然平展状态;
[0057]
2)启动气压缸34,使内夹头311内壁夹紧薄壁材料,并维持内夹头311端部的恒定压力;
[0058]
3)启动图像测量系统,确定薄壁材料标记点的初始坐标位置,启动伺服电机,维持恒定的速率对薄壁材料进行拉伸,记录拉伸过程中标记点的位置的相对变化,试样表面印制有m
×
n行方格,第1行第1列方格角点坐标为(x
11
,y
11
)、(x
12
,y
12
)、(x
21
,y
21
)、(x
22
,y
22
),则第m行n列的坐标为(x
(2m-1)(2n-1)
,y
(2m-1)(2n-1)
)、(x(
2m-1)2n-1
,y(
2m-1)(2n)
)、(x
(2m)(2n-1)
,y
(2m)(2n-1)
)、(x
(2m)(2n)
,y
(2m)(2n)
),采用竖向边缘标记点位移变化确定试样的竖向应变,初始时刻第i列方格左侧竖向边缘角点的距离为:
[0059]
l
i(0)
=y
(2m)(2i-1)(0)-y
1(2i-1)(0)
[0060]
式中,l
i(0)
为初始时刻第i列方格左侧竖向边缘角点距离,y
1(2i-1)(0)
、y
(2m)(2i-1)(0)
分别为初始时刻第i列第1行方格左上侧纵坐标和第i列第m行左下侧纵坐标;
[0061]
t时刻第i列方格左侧竖向边缘角点的距离为:
[0062]
l
i(t)
=y
(2m)(2i-1)(t)-y
1(2i-1)(t)
[0063]
式中,l
i(t)
为t时刻第i列方格左侧竖向边缘角点距离,y
1(2i-1)(t)
、y
(2m)(2i-1)(t)
分别为t时刻第i列第1行方格左上侧角点纵坐标和第i列第m行左下侧角点纵坐标;
[0064]
同理,初始时刻与t时刻第i列方格右侧竖向边缘角点的距离为:
[0065]ri(0)
=y
(2m)(2i)(0)-y
1(2i)(0)
[0066]ri(t)
=y
(2m)(2i)(t)-y
1(2i)(t)
[0067]
式中,r
i(0)
、r
i(t)
分别为初始时刻和t时刻第i列方格右侧竖向边缘角点距离,y
1(2i)(0)
、y
(2m)(2i)(0)
分别为初始时刻第i列第1行方格右上侧纵坐标和第i列第m行右下侧纵坐标;y
1(2i)(t)
、y
(2m)(2i)(t)
分别为t时刻第i列第1行方格右上侧纵坐标和第i列第m行右下侧纵坐标;
[0068]
则t时刻试样的竖向应变εv的表达式为:
[0069][0070]
式中,ε
v(t)
为t时刻试样的竖向应变;
[0071]
初始时刻、t时刻第j行方格上侧横向边缘角点的距离为:
[0072]dj(0)
=x
(2j-1)(2n)(0)-x
(2j-1)1(0)
[0073]dj(t)
=x
(2j-1)(2n)(t)-x
(2j-1)1(t)
[0074]
式中,d
j(0)
、d
j(t)
分别为初始时刻、t时刻第j行方格上侧横向边缘角点的距离,x
(2j-1)(2n)(0)
、x
(2j-1)1(0)
分别为初始时刻第j行第n列方格右上侧角点横坐标、第j行第1列方格左上侧角点横坐标,x
(2j-1)1(t)
、x
(2j-1)2n(t)
分别为t时刻第j行第1列方格左上侧角点横坐标、第j行第n列方格右上侧角点横坐标;
[0075]
初始时刻、t时刻第j行方格下侧横向边缘角点的距离为:
[0076]sj(0)
=x
(2j)(2n)(0)-x
(2j)1(0)
[0077]sj(t)
=x
(2j)(2n)(t)-x
(2j)1(t)
[0078]
式中,s
j(0)
、s
j(t)
分别为初始时刻、t时刻第j行方格下侧横向边缘角点的距离,x
(2j)1(0)
、x
(2j)(2n)(0)
分别为初始时刻第j行第1列方格左下侧角点坐标、第j行第n列方格右下侧角点坐标,x
(2j)1(t)
、x
(2j)(2n)(t)
分别为t时刻第j行第1列方格左下侧角点坐标、第j行第n列方格右下侧角点坐标;
[0079]
t时刻试样的横向应变的表达式为:
[0080][0081]
式中,ε
h(t)
为t时刻试样的横向应变;
[0082]
通过式(11)求得材料的泊松比:
[0083][0084]
式中,μ
(t)
时刻试样的泊松比。
[0085]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0086]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1